
Оглавление:

Дифференциальный метод
- Дифференциальный метод Дифференциальный метод относится к аналитическому методу. Суть заключается в создании уравнения, в котором положение S рабочего звена привода механизма выражается как функция нескольких параметров. Координата *, начальная ссылка, размер q2 ссылки q2 и т. Д. Уравнения можно создавать, проецируя размеры звеньев диаграммы движения механизма на оси декартовой системы координат или используя геометрические соотношения сторон и углов, которые являются контуром механизма. Параметры x, y, qi, q2i … yqn считаются переменными и их ошибка первого порядка отклонения.
Это выражение выражается как ошибка расположения механизма. M = f Ax L A, + f- A * + … (4.2) dx do dqx dqn Если λ1 и Ay равны нулю, уравнение (4.2) принимает следующий вид: Где D? 2> — »D ^ l — главная ошибка параметра, q2, -, qn • Ошибка в положении механизма определяется как сумма нескольких слагаемых: величина частичной ошибки ASh, частичная ошибка AS, возникающая в результате действия отдельной первичной ошибки Aqr, является первичной ошибкой Aq (и ее коэффициент влияния Bf /
Форма представления полной производной функции (4.1) имеет вид dsJ ± dx + fdy + ^ dq ^. ^ dqn. dx by dqx dqn Людмила Фирмаль
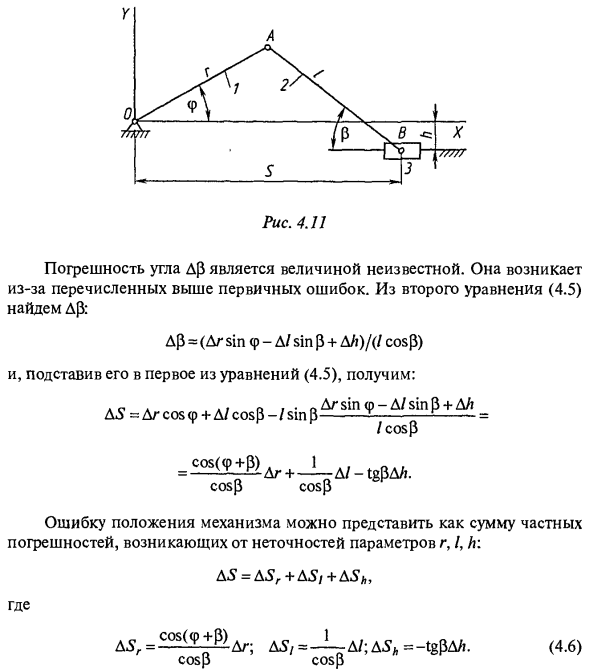
В зависимости от величины ошибок dqi AS можно найти, взяв производную функции из положения (4.1) по i-му параметру и считая все остальные параметры постоянными. Используя этот метод, если существует функциональная связь между положением рабочего звена и параметром, содержащим ошибку, вы можете найти ошибку положения механизма независимо от причины. Этот метод не учитывает основные ошибки параметров, не включенных в уравнение механизма (4.1) (это недостаток). Пример 4.1. Предположим, что звено кривошипно-шатунного механизма / (рис. 4.11) является первым звеном и является звеном 3-х приводного звена. Ошибка положения механизма, т.е. ошибка положения AS звена 3>, определяется координатой S.
Ошибка вызвана ошибкой размера ссылки (ссылка 1-Ar, ссылка 2-A /) и ошибкой эксцентриситета. Положение ведущей ссылки соответствует той же позиции идеального механизма. Df = 0. Спроецируйте план механизма на оси OX и OU. rcos <p + / cosP = S; rsin <p + / i = / sinp. (4.4) Дифференцируем уравнение (4.4) по параметрам rJ, h, S, p и передаем его основной ошибке параметра, чтобы получить: Ar cos f + D / cosP- / Ar sin p = AS; Арсин <p + A / f = A / sinp + / Apcosp. (4.5)
- Рисунок 4.11 Угловая ошибка Dp является неизвестной величиной. Это вызвано вышеуказанной основной ошибкой. Dp можно найти из второго уравнения (4.5). DR = (Dg sin f-D / sin P + YES) / (/ косп) И если вы подставите его в первую формулу формулы (4.5), это станет следующим. asa a I o «-o Arsin f-D / sinP + A / i AS = Ar cos f + D / cosp- / sin p —— = / cosP = 1 ^ косп косп Ошибка в положении механизма может быть выражена как сумма частичных ошибок, возникающих из-за неточностей в параметрах r, f и L. AS = AS, + AS / + ASa, D ^ = C05 (F + P) DG; ^ = 1 ^ in_ (4 6) косп косп
Смотрите также:
| Отклонения формы и расположения поверхностей | Метод преобразованного механизма |
| Задачи, решаемые при определении точности механизмов | Геометрический метод |
