
Оглавление:

Геометрически изменяемые и неизменяемые сооружения. Степень свободы плоской системы
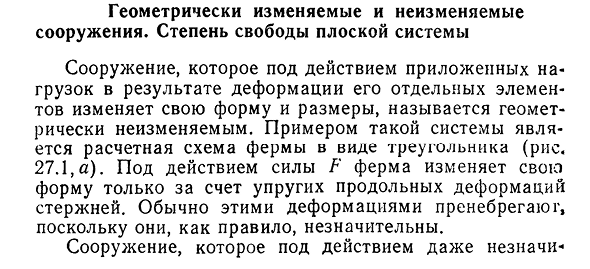
- Геометрически изменчивая и неизменная структура. Степень свободы плоской системы изменяет ее форму под действием приложенной нагрузки в результате деформации отдельных элементов, и примером такой системы, размер которой называют геометрически инвариантным, является чертеж фермы конструкции в виде треугольника(рис. 27.1, а). Под действием силы F ферма меняет свою форму только из-за упругой продольной деформации стержня.
Обычно эти варианты игнорируются. На структуру влияют мелочи- 296 нагрузка на тело, изменяющая форму и положение за счет перемещения отдельных элементов без деформации, называется геометрически переменной. Такая конструкция не уравновешивает внешнюю нагрузку, а, наоборот, движется под ее действием. Примером модифицируемой конструкции является шарнирный стержневой прямоугольник(рис. 27.1, 6). В конструкциях используются только геометрические инварианты, способные воспринимать внешние воздействия без изменения их формы
и размера. Для выяснения проблемы инвариантности (изменчивости) структуры и условий, необходимых для этого, проводится Людмила Фирмаль
кинематический анализ структуры. Показателем изменчивости структуры и расположения структуры является степень ее свободы. Степень свободы конструкции-это количество независимых геометрических параметров, определяющих движение всех элементов. Элемент (или система элементов), выполненный из абсолютно жесткого материала, не изменяющего своей формы и размера, называется диском. Диск может быть одним элементом (стержнем) или частью конструкции (или всей конструкции). Далее рассматриваются только плоские диски. Диск имеет три степени
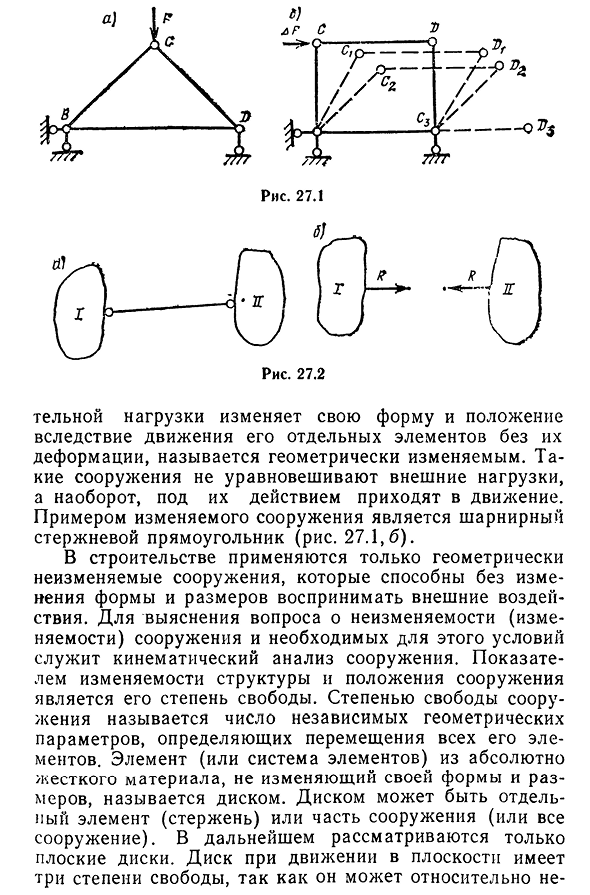
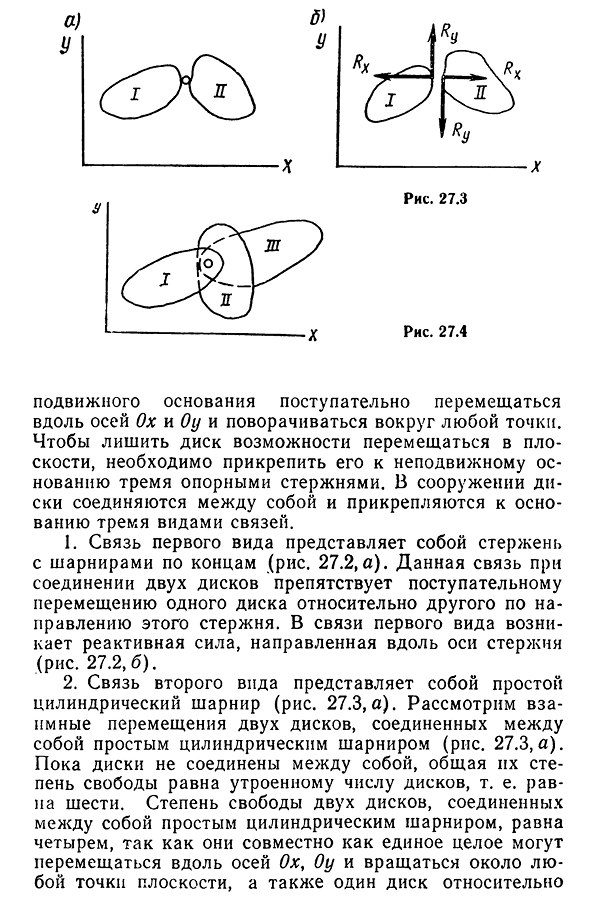
свободы, потому что он не может быть относительно при движении в плоскости- 297подвижное основание вращается вокруг любой точки, перемещаясь вдоль оси перевода Ох и ох. Для того чтобы лишить диск возможности перемещаться в плоскости, необходимо прикрепить его к неподвижному основанию тремя опорными стержнями. В конструкции диска к основанию крепится три типа соединений, которые соединяются между собой. 1. Первый вид соединения-стержень с шарнирами на обоих концах(рис. 27.2, а). Это соединение, при соединении двух дисков, предотвращает относительное перемещение одного диска в направлении этого стержня. В связи с первым типом возникает реактивная сила, направленная вдоль оси стержня (фиг. 27.2, б). 2. Второй тип соединения состоит из простого
- цилиндрического шарнира (рис. 27.3, а). Рассмотрим взаимное перемещение двух дисков, соединенных простым цилиндрическим шарниром(рис. 27.3, а). Пока диски не соединены друг с другом, их полная свобода в три раза превышает число дисков, то есть равна шести. Они могут двигаться вдоль оси и вращаться вокруг любой точки плоскости, а также один диск относительно, ах ах, вместе в целом, так что это не так просто. 298 страницы 27.5 Его можно вращать близко к шарниру. Простой цилиндрический шарнир, соединяющий два диска, соответствует двум звеньям. В простом цилиндрическом шарнире сила реакции в любом направлении
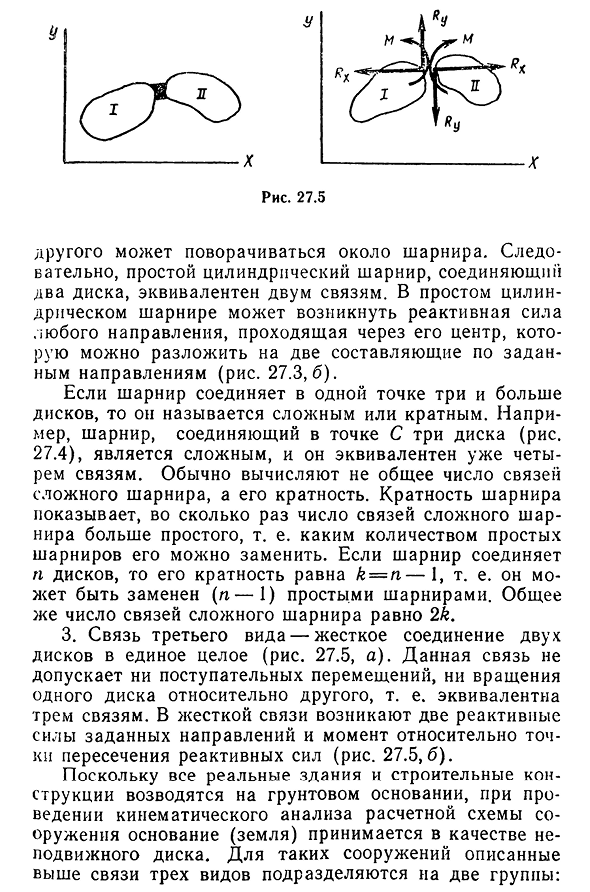
может проходить через его центр, который может быть разбит на две составляющие в заданном направлении (27.3, 6). Если шарнир соединяет три или более дисков в одной точке, он называется сложным или множественным. Например, соедините три диска в точке с шарнирами (рис. 27.4), является сложным, и это уже приравнивается к четырем соединениям. Обычно он не вычисляет общее число Соединенных сложных шарниров и их кратность. Кратность шарниров указывает, во сколько раз число соединений сложных шарниров больше, чем простых. Если шарнир соединяет n дисков, то его кратность можно заменить на k=n-1, то есть простым шарниром (n-1). Общее количество сложных шарнирных соединений составляет 2K. 3. Третий тип соединения-жесткое соединение двух дисков в единое целое (см. 27.5, а).
Это соединение не позволяет Людмила Фирмаль
перемещать или поворачивать один диск относительно другого. В жесткой связи существуют две силы реакции в заданном направлении и момент относительно пересечения сил реакции (фиг. 27.5, 6). Все реальные здания и сооружения строятся на грунтовом фундаменте, поэтому при кинематическом анализе расчетной схемы сооружения основание (земля) делится на две группы, три вида соединений выше, для такой конструкции как неподвижный диск.: 299 внешние и внутренние. Внешнее звено называется его опорным стержнем. Называются внутренние соединения, с помощью которых отдельные диски конструкции соединяются между собой. Перейдем к определению степеней свободы в сложной структуре. Настройте структуру на диске D. Количество простых цилиндрических соединений, соединяющих эти диски, составляет S. конструкция, которая равна прикрепленной к неподвижному основанию с
помощью опорных опор SOP. До тех пор, пока диски не соединены друг с другом и не соединены с основанием, их степени свободы равны ZD. После соединения их с цилиндрическими шарнирами степень свободы уменьшается на 2 sh, а после прикрепления диска к земле с помощью опорного стержня степень свободы уменьшается на величину SOP. Исходя из этого рассуждения, мы получаем следующие формы для определения подвижности плоской структуры: NO=Z D-2W-S OP, (27.1) Здесь W-степень свободной структуры, число d-дисковых структур, W-число простых цилиндрических соединений, соединяющих колеса.Dis-количество опорных стержней. По формуле (27.1) можно получить три качественно различных результата: 1) структура не имеет достаточного числа связей, то есть она
геометрически изменчива{механизм имеет необходимое число связей, а при правильном расположении образует геометрически инвариантную и статически определимую систему;3) число<0. Эта структура, если она правильно устроена, имеет чрезмерное количество связей, которые образуют геометрически неизменяемую и статически неопределенную систему. Поэтому для формирования геометрически инвариантных структур необходимо, чтобы число связей было больше или равно степени свободы, то есть no=ZD-2SH-SOP^O. степень свободы таких систем складывается из степени изменчивости внутренней структуры системы и ее подвижности относительно основания в целом. Подвижность планарной системы равна трем. 300 человек степень изменчивости можно определить по формуле、: Я=ЗД-2Ш-3. (27.2) В случае O система имеет необходимое (избыточное) количество соединений и при правильном размещении образует геометрически неизменную внутреннюю систему
Смотрите также:
Решение задач по технической механике
| Основные понятия и расчетные схемы сооружений | Анализ геометрической структуры сооружения |
| Расчетная схема сооружения. Классификация расчетных схем сооружений | Мгновенная изменяемость системы |
