
Оглавление:

Характеристики асинхронного исполнительного двигателя
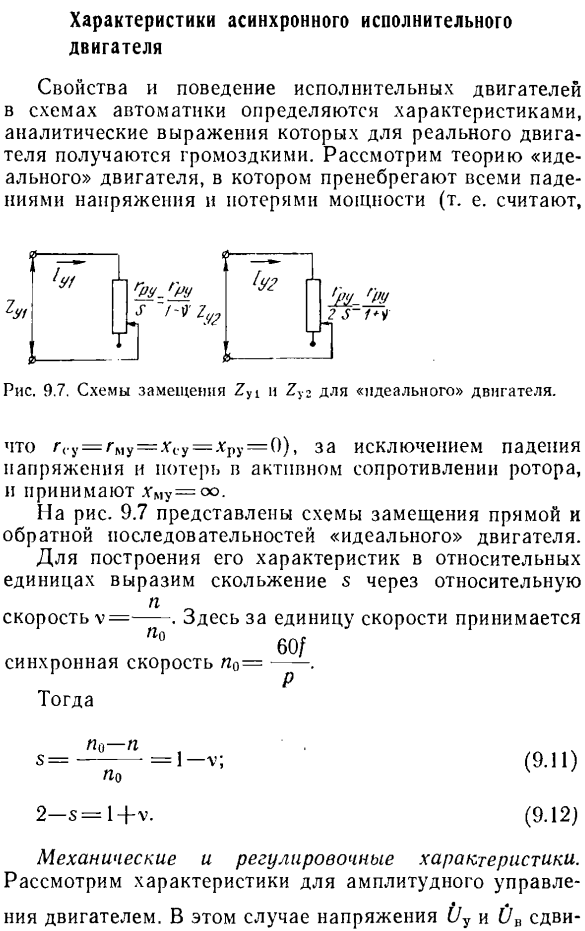
Характеристики асинхронного исполнительного двигателя. Характеристики и режим работы двигателя при выполнении схемы автоматики определяются характеристиками аналитической формулы фактического двигателя, с которой трудно справиться. Рассмотрим теорию «идеального» двигателя, в которой все падения напряжения и потери мощности игнорируются (то есть、 Его r(.y = gMy = l, 1.y = = dgru = 0), однако, кроме падения напряжения и потери активного сопротивления Ротора, принимают l’mu = oo. На рис. 9.7 показана прямая и обратная последовательность схемы замещения» идеального » двигателя. Построить его характеристики в относительных единицах, относительных 5 n0 Синхронная частота вращения N0 =на потом Скорость V =.Здесь берется единица скорости 60. / П (9.12) (9.11) n0-n = 1-V; Около 2-5 = 1 + x’. Механические свойства и регулировочные характеристики. Рассмотрим характеристики амплитудного регулирования engine.
Результирующая электромагнитная сила от статора к ротору представляет собой сумму электромагнитных сил последовательности в прямом и обратном направлениях. Людмила Фирмаль
- In в этом случае напряжения 0U и 0V выходят из фазы на 90°и величина управляющего напряжения изменяется. Обхаживать. Эффективное использование коэффициента сигнала a = rrКоэффициента сигнала АЭ = Кау ) n V 0y = a0ie * = 1a, a = −1 kiu= -, ac -* -. (9.13) Найти значение тока в прямой и обратной последовательности обмотки управления. Заменить на Oy вместо Ou (9.9) и (9.10)、 через ev мы заменяем сопротивление соответствующими значениями» идеального » двигателя. / «1 = 0y? B2 -} kOv2U2 _ Ад 2 + зд、 ; / / И ГРУ: un GRU 1 + g РУ К2 РУ 1-V 1 + t Да.* + ГРУ * 2 2кг 1 + при 1-V (1-V) (1 + 06 *.это не так. (9.14) РУ Коэффициент тока прямой последовательности / у1= » 2ТгрУ(9.15 утра)) / * = 0u2v,+} Шв2у1 2×12×2 \ 2х%2×1 −1 X [0vk 1″ -+} k0 1-V 1-V / Оса? эВ& -| 1-V Ram= Ram1 + Ram2 =(V + / B12)+ \ 1-на 1—» / 1-V С / Один 2 км РУ (1-я) (1-<он).
Модуль тока отрицательной последовательности * / в I U2 = 2 км (1 + Y) (1-a.). (9.17)) РУ Лру Л 1 + Y РУ = 2 / y12T ^ + 2 / y22. 、 1-V 1 / U (9.18) (4) m ^] + Поскольку машина работает в режиме двигателя для поля прямой последовательности и в режиме электромагнитного тормоза для поля обратной последовательности, результирующий момент M будет таким же, как и результат. Около Но Но… = 2 / » 2 РУ Йо(1) −2 / y22′ РУ Ура(1 + У) ’ (9.19) R:) M1 Ram2 М =В П2 [2a » (1 + ac2) y] 30 ^ / B2 lA2Lo [2a * (1 + a «2) t]. (9.20 утра)) Подставляя текущие модули/ U1 и / y2 из равенств (9.15) и(9.17) в Формулу (9.19), получаем значение момента»идеального» двигателя в таком виде. В блоке моментов возьмем начальный момент Mn0, развиваемый двигателем в круговом поле (ac = 1; x = 0): Мно30’2 UV2 LY2L0Gru Т = М МПО = Ксенон— 1 + a » 2 В (9.21).
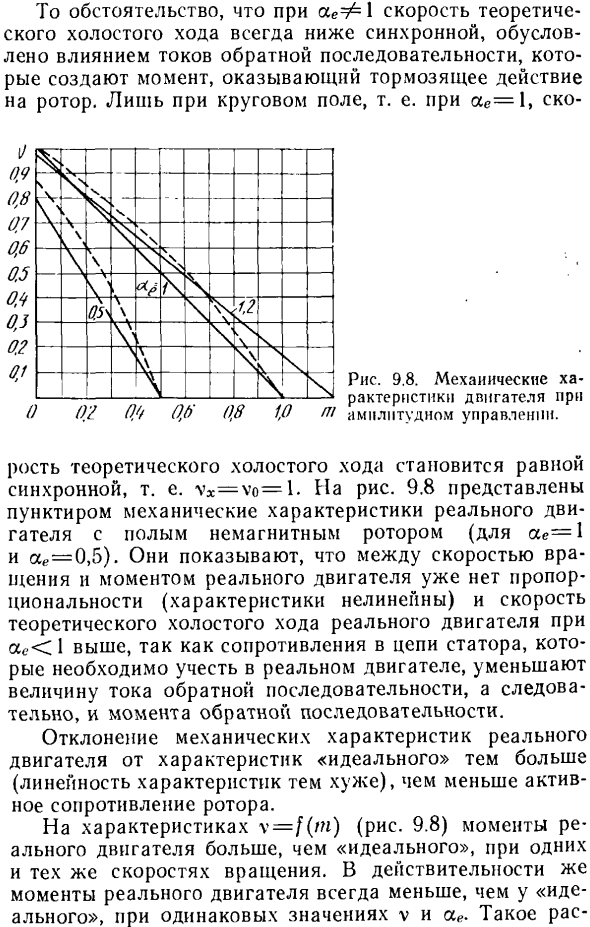
- Тогда момент в относительных единицах Уравнение механических свойств»идеального» двигателя\ = {(m) для aP = sop51 можно получить из Формулы(9.21). (9.22) 2 (ae-t)» ’ 1 + a * 2 Уравнение (9.22) показывает, что скорость V этого двигателя является линейной функцией момента T. На рисунке 9.8 показан ряд механических свойств для различных соотношений Сигнал. Как видно из характеристик, максимальный крутящий момент генерируется двигателем при запуске. Величина этого момента в относительных единицах равна эффективному коэффициенту сигнала. То есть, если\ * = 0, то mn = ae. значение m = ^ ae (m = 0) равно、 1 + ae2 Так называемый теоретический холостой ход. в AEF\ Круговые поля только, то есть, если ae = 1 Рис. 9.8.
Механические характеристики двигателя с амплитудным регулированием. Теоретическая скорость холостого хода будет равна синхронной. То есть,\ * = YO = 1.Рисунок 9. 8 ломаная линия показывает механические свойства фактического двигателя с полым немагнитным ротором(для ae = 1 и out * = 0.5).Не существует пропорциональной зависимости между частотой вращения и моментом фактического двигателя (характеристики нелинейны), а теоретическая скорость холостого хода фактического двигателя выше, потому что обратный ток уменьшается из-за сопротивления цепи статора, которое должно быть учтено в фактической последовательности двигателя* <1, и, следовательно, момент обратной последовательности.
Тот факт, что теоретическая скорость холостого хода всегда меньше синхронной скорости, обусловлен действием тока в обратной последовательности, который вызывает моменты торможения ротора. Людмила Фирмаль
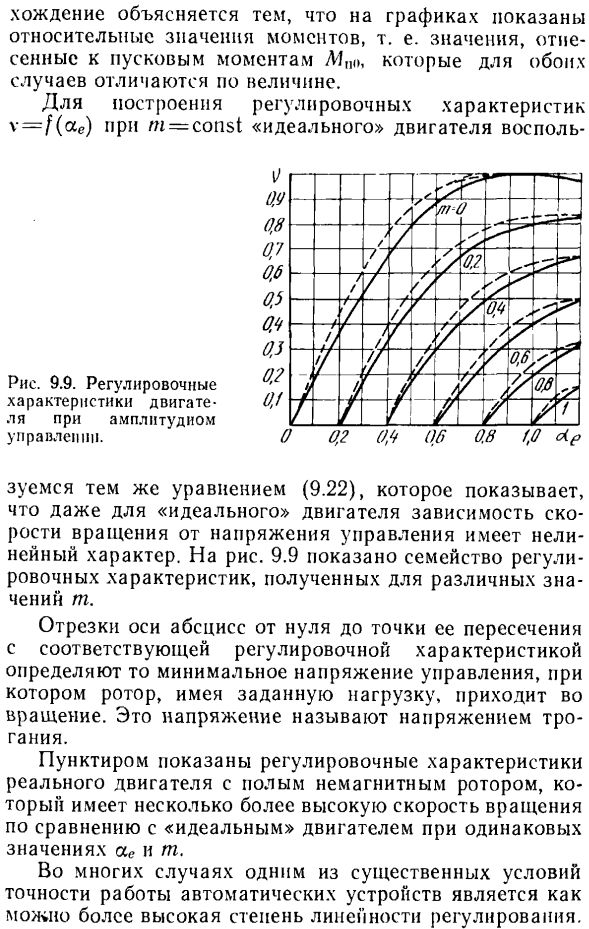
- Отклонение механических свойств фактического двигателя от характеристик»идеального» больше при меньшем сопротивлении Ротора(линейность характеристик ухудшается). В характеристике\ =} (t) (рис. 9.8) фактический момент двигателя больше, чем «идеальный» момент при том же вращении speed. In реальность, фактический момент двигателя всегда меньше «идеального» момента, и значения V и a *одинаковы. Это несоответствие объясняется тем, что на графике показано относительное значение момента, то есть значение, присвоенное начальному моменту M. Чтобы построить свойство корректировки x =((ac) с w = const.
Смотрите также:
