
Классификация кинематических пар
Одной из основных характеристик кинематических пар является количество простейших относительных движений, которых лишаются звенья механизма при соединении их в кинематические пары. Известно, что свободное твердое тело в пространстве имеет шесть степеней подвижности. Произвольное перемещение его в пространстве можно представить как результат сложения шести независимых движений: трех поступательных параллельно осям координат  и трех вращательных относительно этих осей (рис. 1.2). В зависимости от вида соединений звеньев механизма одно из них может совершать относительно другого одно, два, три, четыре или пять движений из шести, перечисленных выше. Следовательно, кинематические пары накладывают на относительные движения звеньев определенные ограничения, которые зависят от способа их соединения. Такие ограничения называются связями. Число
и трех вращательных относительно этих осей (рис. 1.2). В зависимости от вида соединений звеньев механизма одно из них может совершать относительно другого одно, два, три, четыре или пять движений из шести, перечисленных выше. Следовательно, кинематические пары накладывают на относительные движения звеньев определенные ограничения, которые зависят от способа их соединения. Такие ограничения называются связями. Число  связей (геометрических или силовых), ограничивающих относительные движения звеньев, определяется равенством
связей (геометрических или силовых), ограничивающих относительные движения звеньев, определяется равенством  , где
, где  — число степеней подвижности кинематической пары — число независимых движений одного звена относительно другого, образующих кинематическую пару.
— число степеней подвижности кинематической пары — число независимых движений одного звена относительно другого, образующих кинематическую пару.
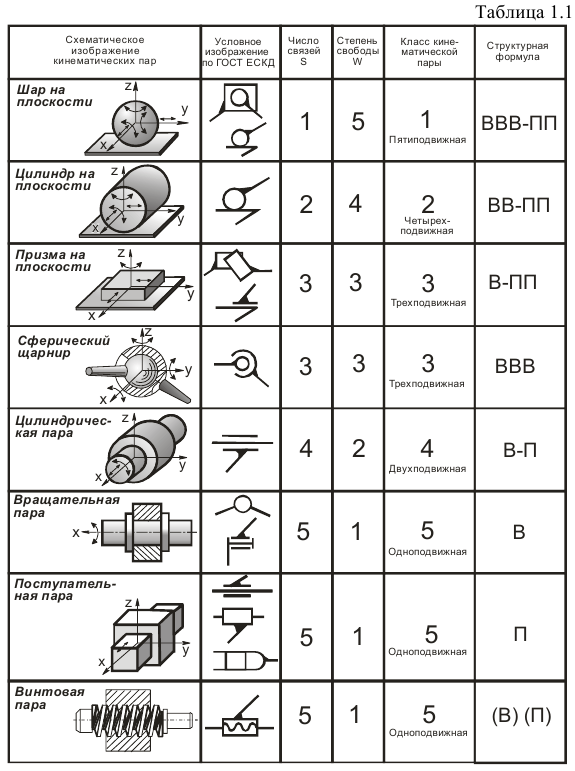
Академиком И.И.Артоболевским введена классификация кинематических пар, согласно которой все пары делятся на пять классов в зависимости от числа связей (или от — степеней подвижности кинематической пары). Разделение кинематических пар по классам представлено в табл. 1.1. Стрелками здесь отмечены возможные перемещения звеньев, которые сохраняются после образования пары.
Для каждого класса указаны число степеней подвижности кинематической пары и число связей , показаны также условные изображения кинематических пар различных классов, в соответствии с ГОСТ 2.770-68.
Кинематические пары разделяют на низшие и высшие, в зависимости от вида их элементов. К низшим кинематическим парам, элементами которых являются поверхности, относятся пары поступательная, вращательная, сферическая, винтовая и плоскостная (см. табл. 1.1). Точки и линии — элементы высших кинематических пар. К высшим кинематическим парам относятся пары «шар на плоскости» и «цилиндр на плоскости» (табл. 1.1). Преимущества для низший пар — их способность передавать значительные усилия при меньшем износе в сравнении с высшими парами; недостаток — меньший КПД; для высших пар — возможность воспроизводить с их помощью достаточно сложные относительные движения, больший КПД; недостаток — большие напряжения в зоне касания.
Эта теория взята со страницы лекций по предмету «прикладная механика»:
Возможно эти страницы вам будут полезны:
| Структура (строение) механизмов |
| Составные части механизма |
| Кинематические цепи |
| Степень подвижности кинематической цепи |
