
Оглавление:


Нелинейные колебания. Примеры нелинейных систем
- Как и в предыдущей главе, в главе viii тома 2 учитывались колебания материальных точек и материальных систем, описываемых линейными дифференциальными уравнениями. Следовательно, сила упругости f — cr и сила сопротивления движению r −0 изменялись линейно при изменении точки массообмена. Во многих системах машин движение описывается нелинейными дифференциальными уравнениями. Значительное число электромеханических и электрических систем также соответствуют нелинейным уравнениям.
Появление нелинейного члена в уравнении обусловлено, например, наличием упругой силы или сопротивления движению, или электрическим током, который изменяется по нелинейному закону. Линеаризация дифференциальных уравнений такого движения, то есть замена строгих нелинейных уравнений приближенными линейными уравнениями, не только влияет на количественные результаты, но и естественным образом искажает качественные аспекты рассматриваемых явлений, характерные для нелинейных систем. Налоги, изохронный, то есть, частота линейных колебаний маятника не зависит от начальных условий движения, не существует в случае нелинейных колебаний.
Если сумма моментов всех внешних сил системы относительно оси равна нулю, то можно получить соотношение между массами материальных точек, их скоростями и угловой скоростью вращения подвижной среды. Людмила Фирмаль
Амплитуда линейных вынужденных колебаний при наличии сопротивления, пропорционального скорости, является единственной непрерывной функцией коэффициента высвобождения, который в случае нелинейных вынужденных колебаний изменяется поэтапно явление скачка. Природа автоколебаний не может быть объяснена с помощью приближенного линейного дифференциального уравнения. В связи с отсутствием общепринятых методов интегрирования нелинейных дифференциальных уравнений в последнее время проводятся исследования, широко используются приближенные аналитические и графические методы.
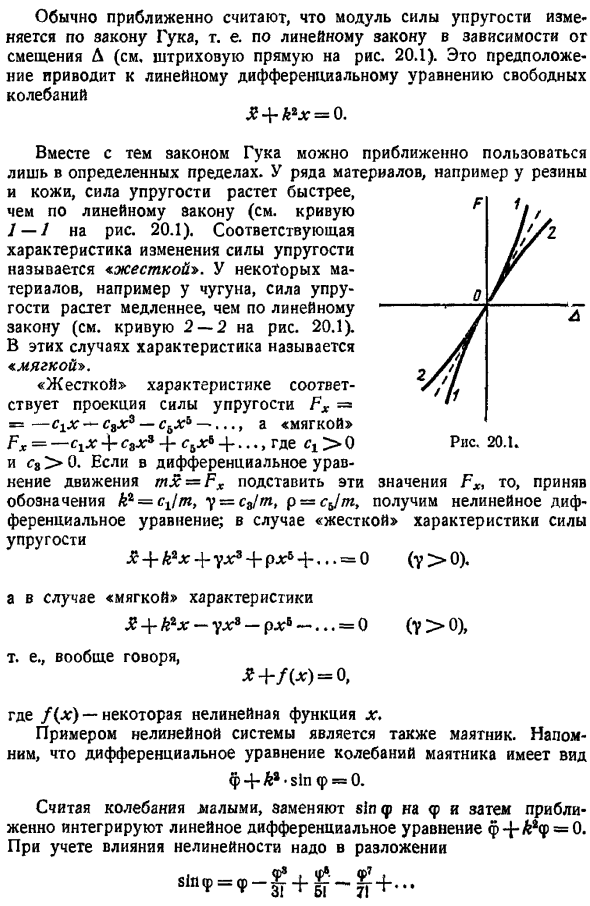
Рассмотрим некоторые примеры нелинейных материальных систем, то есть систем, в которых движение описывается нелинейными дифференциальными уравнениями. Как правило, модуль упругости грубо считается изменяющимся в соответствии с законом крюка, то есть линейным законом, в зависимости от d смещения см. Пунктирную линию на рисунке 20. 1. Это предположение приводит к линейным дифференциальным уравнениям свободных колебаний А, Х 0. В то же время закон крюка может быть использован только приблизительно в определенных пределах. Limits. In во многих материалах, таких как резина и кожа, сила упругости растет быстрее, чем вдоль линейного eacon см. Рисунок 20. 1, кривая 1-1.
Свойства, соответствующие изменению силы упругости, называются жесткостью. Для некоторых материалов, таких как чугун, упругая прочность увеличивается медленнее, чем линейный закон см. Рис. 20. 1 кривые 2-2. В этих случаях характеристика называется мягкой. Жесткой характеристикой является сила упругости Форекс — СНГ-cbx3-c6×6×6 -. .И мягкий Fx -cxx-ctx c6x соответствует проекции.
- Дифференциальное уравнение mx Fx движения, замените эти обозначения-y-Сз т, P C, Jm. Для свойства жесткости силы упругости Х A2x стринги px6.. 0 г 0. А в случае с мягкими характеристиками a1x-yx8-px6 -. .0 г 0 То есть, в общих чертах 0 Где f x — нелинейная функция от x .Примером нелинейной системы является также маятник. Вид дифференциального уравнения колебаний маятника равен p sln p 0.Предполагая, что вибрация мала, замените slng на, а затем интегрируйте линейное дифференциальное уравнение 4-Аф 0 примерно линейно. Учитывая эффекты нелинейности, ее следует расширить. Рис.
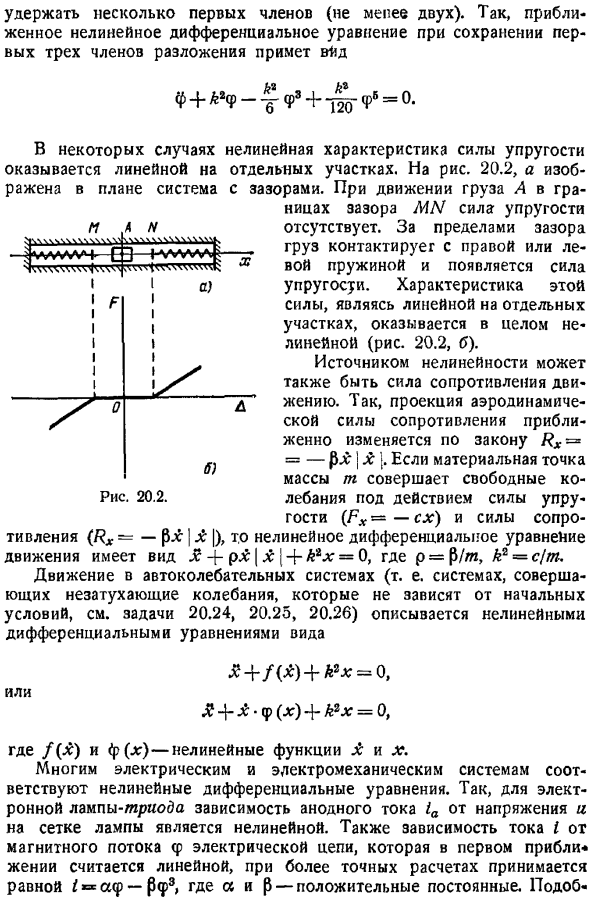
Значение f Сохраните первые несколько членов не менее 2.Таким образом, сохраняя первые 3 члена разложения, приближенное нелинейное дифференциальное уравнение выглядит следующим образом — 3 — 0.с Рис. 20.2.В некоторых случаях нелинейные свойства силы упругости линейны в отдельных сечениях. Рисунок 20.2, а система с зазором показана на плане. При движении груза а на границе зазора MN отсутствует упругая сила.
Если некториая сумма моментов всех внешних сил системы относительно неподвижного центра равна пулю, то главный момент количеств движения системы относительно того же центра постоянен, т. Людмила Фирмаль
Вне зазора нагрузка вступает в контакт с правой или левой пружиной, и возникает упругая сила. Можно видеть, что свойства этой силы, Линейной в отдельных сечениях, в общем случае нелинейны рис.20.2, б. Причиной нелинейности является также сопротивление движению. Поэтому проекция аэродинамического сопротивления равна Rx —Px X .Если материальная точка массой m свободно колеблется под действием силы упругости Pj — cx и По сопротивлению системы Rx—Px jf вид нелинейного дифференциального уравнения движения равен X px L kgx 0, где p P ty, kg s T. Движение автоколебательной системы то есть системы, которая совершает свободные от затухания колебания независимо от начальных условий, см.
Задачи 20.24, 20.25, 20.26 описывается нелинейным дифференциальным уравнением вида -о X x x Л x 0, где f X и x — нелинейные функции X и X. Многие электрические и электромеханические системы соответствуют нелинейным дифференциальным уравнениям. Поэтому в случае электронной Ирисовой лампы зависимость напряжения анодного тока 1А и зависимость сетки лампы являются нелинейными.
Кроме того, зависимость тока I от потока электрической цепи предполагается Линейной в первом приближении, а в более точных расчетах af-Pf3.Где a и p-положительные константы. Хорошо. Электрические схемы соответствуют нелинейным дифференциальным уравнениям.
Смотрите также:
Предмет теоретическая механика
