
Принципы строения и структурная классификация механизмов
Метод классификации плоских механизмов и принципы их строения были разработаны в начале XX в. русским ученым Л.В. Ассуром. Предложенный им метод позволяет проводить классификацию плоских механизмов, удовлетворяющих формуле Чебышева (1.3). Академик И.И.Артоболевский распространил классификацию JI.B. Ассура на пространственные механизмы. Практическое значение классификации заключалось в том, что она давала возможность устанавливать соответствие степени сложности механизма (его класса) методам его исследования и построения.
Построение механизма по Ассуру состоит в последовательном присоединении к ведущим звеньям и стойке особых кинематических цепей, называемых структурными группами или группами Ассура, без изменения степени подвижности механизма в целом. Группа Ассура — кинематическая цепь с нулевой степенью подвижности относительно тех звеньев, к которым она присоединяется своими элементами и которая не распадается на более простые кинематические цепи с нулевой степенью подвижности.
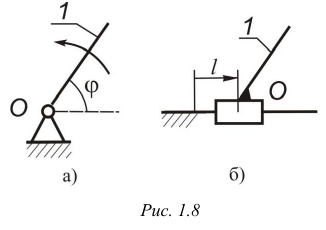
Рассмотрим принцип построения механизмов методом наслоения групп Ассура на примере плоского механизма с одной степенью свободы, у которого положение всех звеньев определяется заданием одной обобщенной координаты ( или 1). Построение механизма начинается с объединения ведущего звена и стойки.
или 1). Построение механизма начинается с объединения ведущего звена и стойки.
Согласно классификации Ассура-Артоболевского, полученный таким образом механизм называется начальным механизмом 1-го класса (рис. 1.8, а, б). Начальный механизм имеет одну степень подвижности. Более сложные механизмы образуются присоединением к начальному механизму групп Ассура. Если группы Ассура имеют лишь кинематические пары 5-го класса, то, используя формулу (1.3), при  =0 находим
=0 находим  . Отсюда
. Отсюда

Таким образом, число звеньев в группе  должно быть четным, а количество кинематических пар
должно быть четным, а количество кинематических пар  — числом, кратным трем. Возможные сочетания количества звеньев и кинематических пар (
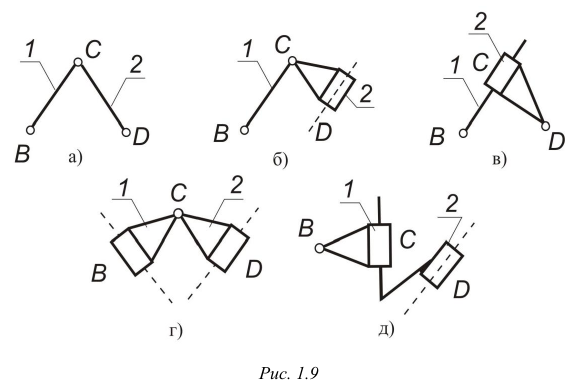
— числом, кратным трем. Возможные сочетания количества звеньев и кинематических пар ( = 2, 4, 6, …; = 3, 6, 9, …) дают возможность получать различные по сложности строения структурные группы. Простейшая из них имеет = 2; = 3 и называется двухповодковой группой (по числу звеньев — поводков) (рис. 1.9). Если один крайний элемент такой группы (элемент В на рис. 1.9, а) присоединить к ведущему звену 1, а другой, крайний элемент
= 2, 4, 6, …; = 3, 6, 9, …) дают возможность получать различные по сложности строения структурные группы. Простейшая из них имеет = 2; = 3 и называется двухповодковой группой (по числу звеньев — поводков) (рис. 1.9). Если один крайний элемент такой группы (элемент В на рис. 1.9, а) присоединить к ведущему звену 1, а другой, крайний элемент  -к стойке 2, то образуется механизм, называемый плоским шарнирным четырехзвенником (см. рис. 1.1).
-к стойке 2, то образуется механизм, называемый плоским шарнирным четырехзвенником (см. рис. 1.1).
Группы Ассура имеют внутренние и внешние кинематические пары. Внутренние пары соединяют между собой звенья группы, а внешними парами группа присоединяется к остальной кинематической цепи.
Число внешних кинематических пар определяет поядок группы Ассура. Например, упоминавшаяся выше двухповодковая группа называется группой Ассура второго порядка.
Структурные группы, у которых = 2; = 3, в зависимости от количества вращательных и поступательных кинематических пар и по-
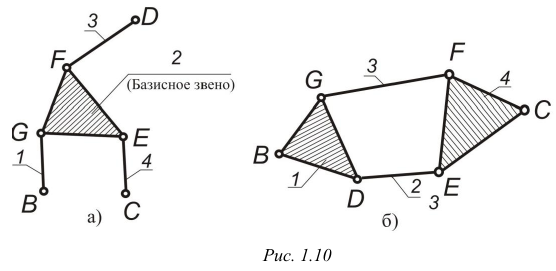
следовательности их расположения могут быть пяти различных видов (рис. 1.9, а-д). Четырехзвенные структурные группы, имеющие = 4; = 6, могут быть трехповодковыми третьего порядка (рис. 1.10, а) и четырехзвенными второго порядка с подвижным четырехсторонним контуром (рис. 1.10, б). Отличительная; особенность трехповодковой группы — наличие внутреннего базисного звена, входящего в три кинематические пары. Различные виды двух последних групп Ассура можно также получить путем замены вращательных кинематических пар поступательными. Структурные группы с числом звеньев более четырех встречаются в механизмах крайне редко.
И. И. Артоболевский расширил и модифицировал классификацию Л.В.Ассура. По классификации И. И. Артоболевского двухповодковая структурная группа условно относится к группам 2-го класса и имеет второй порядок. Класс группы выше второго определяется числом кинематических пар, входящих в замкнутый контур, который образован внутренними кинематическими парами. Поэтому трехповодковая группа, имеющая три внутренние кинематические пары и базисное звено (см. рис. 1.10, а), относится к 3-му классу и имеет третий порядок (по числу внешних кинематических пар). Четырехзвенная группа, имеющая четыре внутренние и две внешние кинематические пары (см. рис. 1.10, б), относится к 4-му классу и имеет второй порядок.
Структурный анализ механизмов (исследование структуры механизмов) предполагает:
- определение количества звеньев механизма, числа и класса его кинематических пар;
- определение степени подвижности механизма;
- разделение механизма на начальные механизмы и структурные группы;
- определение класса и порядка структурных групп.
Результатов структурного анализа является определение класса всего механизма, который соответствует наивысшему классу группы Ассура, входящей в состав механизма. Определение класса механизма, согласно классификации Ассура-Артоболевского, возможна, если в результате предварительного структурного анализа установлено выполнение следующих условий:
- степень подвижности механизма соответствует количеству ведущих звеньев;
- ведущие звенья входят в кинематические пары со стойкой;
- в механизме имеются только кинематические пары 5-го класса.
При наличии в плоском механизме кинематических пар 4-го класса структурный анализ проводится на заменяющем механизме.
Рекомендуется следующая последовательность отделений структурных групп из кинематической цепи механизма. Отделение групп начинается со звеньев, наиболее удаленных от ведущего звена. В первую очередь отделяются группы Ассура наиболее низкого класса. Следует иметь в виду, что после отделения каждой группы степень подвижности механизма должна оставаться неизменной, а каждое звено и кинематическая пара могут входить только в одну структурную группу. Разделение кинематической цепи механизма на группы Ассура ведется до тех пор, пока не останутся только начальные механизмы (ведущие звенья и стойка).
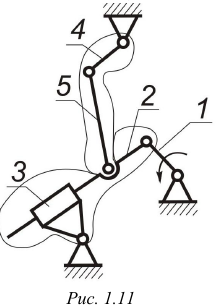
Поясним структурный анализ и классификацию механизмов по Ассуру-Артоболевскому на примере механизма, показанного на рис. 1.11. Механизм имеет пять подвижных звеньев ( = 5) и семь кинематических пар 5-го класса ( = 7). По формуле (1.3) определяем степень подвижности механизма
= 7). По формуле (1.3) определяем степень подвижности механизма

Ведущее звено 1 со стойкой 6 образуют механизм 1-го класса. Ведомую кинематическую цепь можно разделить на две группы Ассура 2-го класса (выделены на рис. 1.11 контурными линиями), начиная с группы, которая состоит из звеньев 4, 5.
Так как механизм имеет в своем составе только группы Ассура 2-го класса, то его следует отнести к механизмам 2-го класса. Кроме двух-, трех-и четырехзвенных механизмов с одноподвижными кинематическими парами (парами 5-го класса) ис-
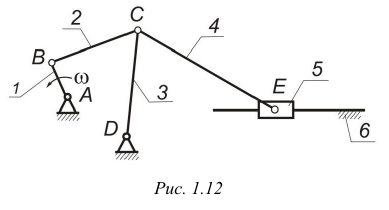
пользуются рычажные механизмы с большим числом звеньев (для реализации специальных законов движения ведомых звеньев). Так шести-звенный двухкривошипно-ползунный механизм (рис. 1.12) применяется в касающихся конвейерах. В таких конвейерах желоб с сыпучим материалом должен перемещаться с меньшей скоростью в направлении перемещения сыпучего материала и с большей скоростью в обратном (чтобы желоб уходил в этом направлении без груза).
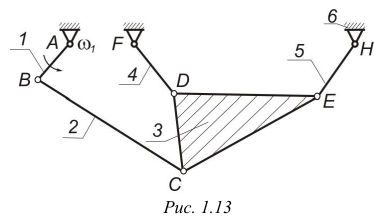
Шестизвенный кривошейно-двухкоромысловый механизм (рис. 1.13) часто встречается в механизмах грохота или сита. Вращение кривошипа 1 посредством шатуна приводит в колебательное движение грохот или сито 3, подвешенное на двух коромыслах 4 и 5.
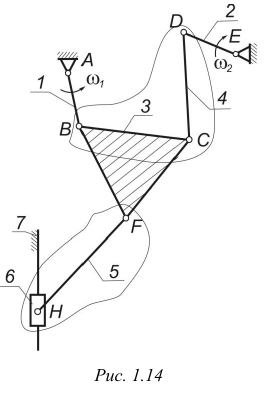
Примером механизма с двумя ведущими кривошипами 1 и 2 (рис 1.14) может служить механизм кривошипно-рычажного пресса.
В машинах и приборах используют также и другие механизмы с большим количеством звеньев.
Группы Ассура с одноподвижными кинематическими (парами 5-го класса) и двухподвижыми кинематическими парами (парами 4-го класса).
При степени подвижности группы  = 0 структурная формула таких групп для плоских механизмов
= 0 структурная формула таких групп для плоских механизмов

где  — число звеньев группы Ассура;
— число звеньев группы Ассура;
 — числа одноподвижных и двухподвижных кинематических пар группы Ассура.
— числа одноподвижных и двухподвижных кинематических пар группы Ассура.
Условие (1.4) выполняется при таких значениях входящих в нее величин
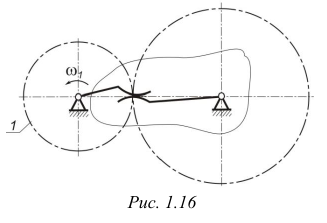
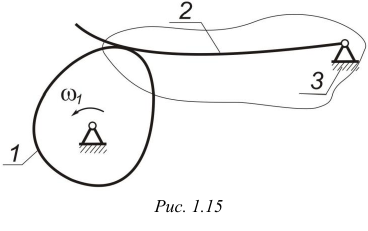
Однозвенные группы с одной одноподвижной и одной двухподвижной кинематическими парами — это группы, входящие в состав кулачковых механизмов (рис. 1.15) и одноступечатых зубчатых рядовых механизмов (рис. 1.16). Рядовые зубчатые механизмы — это такие, у которых зубчатые колеса вращаются относительно неподвижных в пространстве осей.
Двухзвенные группы с двумя одноподвижными и двумя двухпод-вижными (рис. 1.17 n 1.18) кинематическими парами применяются в планетарных зубчатых механизмах. Планетарные зубчатые механизмы — это такие, в которых имеются зубчатые колеса, вращающиеся относительно подвижных в пространстве осей. Такие колеса называются сателлитами.
Принципы построения механизмов по Ассуру-Артоболевскому удобно использовать как при структурном анализе, так и при структурном синтезе механизмов. Уже на этапе проектирования машин их закладываемая работоспособность и надежность во многом зависят от того, несколько правильно и рационально выбраны схема построения механизма и его структура.
Эта теория взята со страницы лекций по предмету «прикладная механика»:
Возможно эти страницы вам будут полезны:
| Кинематические цепи |
| Степень подвижности кинематической цепи |
| Структурно-конструктивная функциональная классификация механизмов |
| Задачи и методы кинематического анализа |
