
Оглавление:

Шаговые двигатели
Шаговые двигатели. Область применения, классификация и требования к шаговым двигателям. Шаговый двигатель используется для преобразования электрических импульсов в дискретное угловое или прямолинейное движение («шаг»). «Преобразуя цифровую информацию в виде электрических импульсов в соответствующее движение, то есть функцию выходного декодирующего звена, шаговый двигатель можно использовать для создания автоматической системы управления, не требующей обратной связи. Последняя ситуация упрощает систему управления механизмом и повышает его надежность. Шаговый двигатель (stepper motor) используется в автоматизированных дискретных устройствах наряду с электронными переключателями, предназначенными для переключения обмотки шагового двигателя на последовательность и частоту, соответствующие определенной команде.
Тип электронного выключателя во многом определяет параметры и характеристики двигателя. Людмила Фирмаль
- В общем случае шаговый двигатель с управляющим электронным переключателем можно рассматривать как систему регулировки частоты синхронного двигателя, которая фиксирует угловое положение ротора, то есть может изменять частоту до нуля. В последнее время шаговые двигатели все чаще используются в системах регулирования и управления (программное управление электроприводами, вычислительными устройствами и др.).Эти системы могут быть построены по-разному. Некоторые шаговые двигатели функционируют как двигатель, который работает непосредственно или через мгновенный усилитель, в то время как другие являются вспомогательными элементами и отвечают за настройку входного сигнала на некоторую сервосистему.
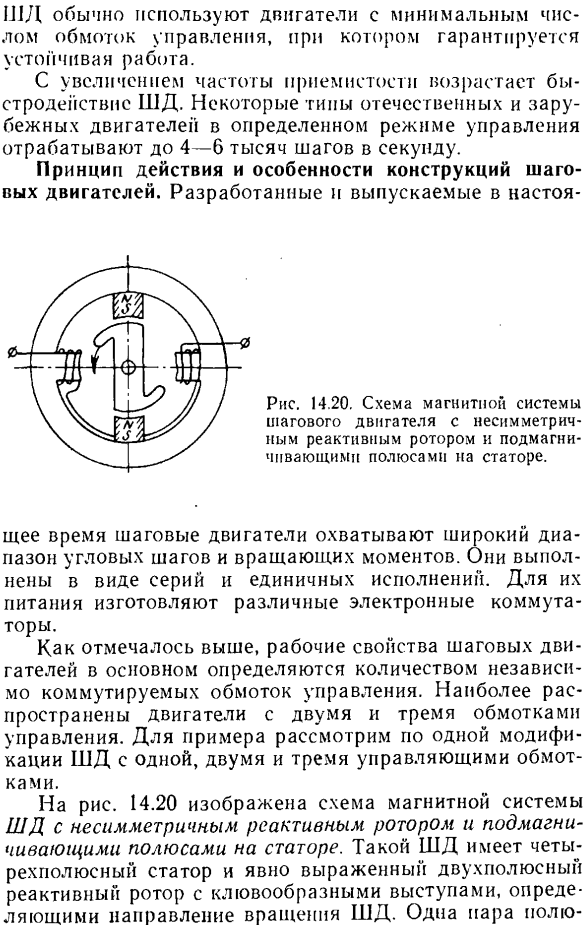
В зависимости от конструкции шаговый двигатель делится на 1 и более централизованных или децентрализованных обмоток управления, реактивный или активный Ротор, жесткую механическую или гибкую электромагнитную муфту с валом, индикаторную и выходную, реверсивную и необратимую, одноступенчатую и многоступенчатую. К ним всем предъявляются следующие требования: 1) возможность получения небольшого шага(в некоторых случаях порядка нескольких степеней или части степени). 2)достаточно большое значение синхронизированного момента. Обеспечивает наименьшую ошибку угла во время тренировки шага. 3)выход из допуска накопления погрешности с увеличением числа шагов. 4) отсутствие свободной вибрации во время работы шага; 5) Высокая эффективность; 6) надежность работы при минимальном количестве обмоток управления. 7) простота конструкции двигателя и его блока управления.
| Синхронные гистерезисные двигатели. | Синхронный двигатель с катящимся ротором (ДКР). |
| Реактивно-гистерезисные двигатели. | Однофазный коллекторный двигатель. |
Примеры решения, формулы и задачи
| Решение задач | Лекции |
| Расчёт найти определения | Учебник методические указания |
- При рассмотрении основных характеристик и параметров шагового двигателя мы покажем вам, как выполнить перечисленные требования. 360 ° 2 RT н РТ (14.14) Шаг цены-это шаг в градусах или градусах, в радианы. Где m число обмоток управления, пространственно смещенных друг от друга. ах = 360°2l 12t (14.15)) Если число полюсов 2p статора и ротора различно, то в Формулу (14.14) необходимо подставить большее из 2 чисел. Реактивный тип DD, то есть если в Роторе нет возбуждения, то число полюсов 2p равно числу зубьев в Роторе 2o, в этом случае Из формул(14.14) и (14.15) видно, что число полюсов и число обмоток управления можно увеличить для уменьшения шагов. Двигатели с активным Ротором (обмотка возбуждения или постоянные магниты) по техническим причинам не могут быть выполнены на большом количестве полюсов, поэтому количество полюсов ограничено РНС. 14.18.
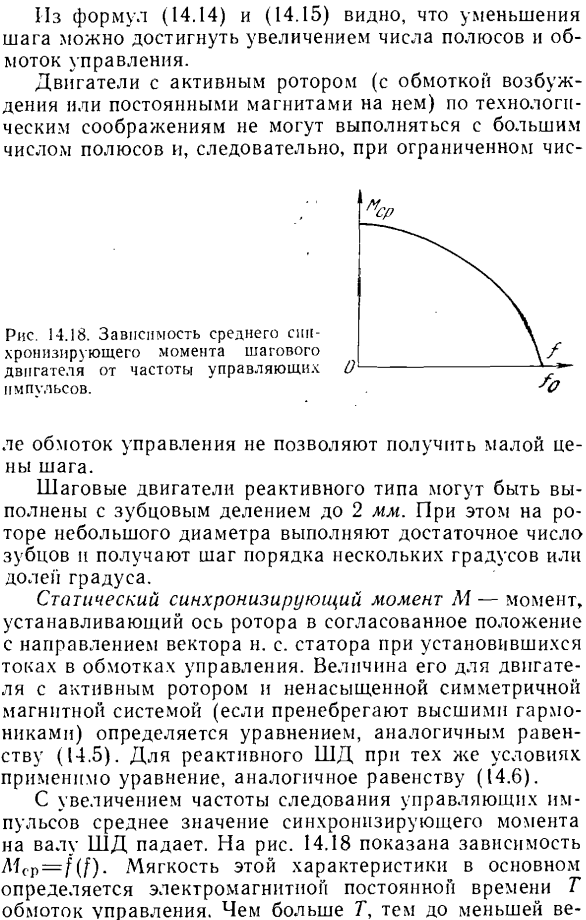
Зависимость средних синхронных моментов шагового двигателя от частоты управления Пульс. Струйный шаговый двигатель может быть создан с разделением передач до 2 mm. At при этом на роторе малого диаметра выполняется достаточное количество зубьев, что дает шаг порядка от 1 до нескольких градусов или минут. Статический синхронный момент M это момент, который устанавливает ось ротора в положение, согласованное с направлением вектора n. статор, в котором постоянный ток протекает через S-управляющую обмотку. Величина двигателя с активным Ротором и ненасыщенной симметричной магнитной системой (при игнорировании гармоник) определяется уравнением, аналогичным уравнению(14.5).Для реактивной СД при тех же условиях применяется уравнение, аналогичное уравнению (14.6).
Небольшая цена шага не может быть получена с одной обмоткой управления. Людмила Фирмаль
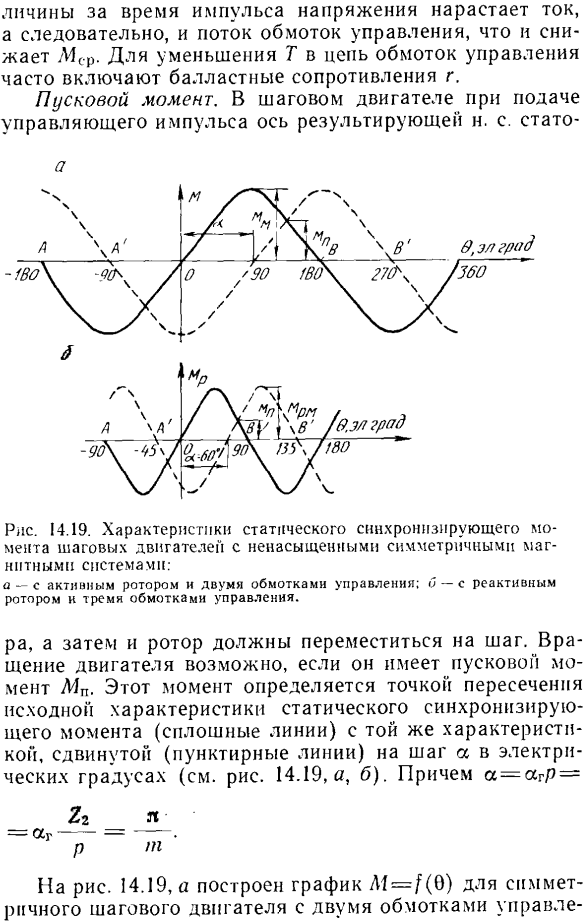
- По мере увеличения частоты следования управляющего импульса среднее значение синхронизированного момента вала Ш уменьшается. На рисунке 14.18 показана зависимость L4av = /(/).Мягкость этой характеристики в основном определяется электромагнитной постоянной времени G обмотки управления. Чем больше \7, тем меньше ток увеличивается во время импульса напряжения, что приводит к меньшему расходу в обмотке управления и уменьшению L] sp. Чтобы уменьшить G, обмотка управления часто включает балласт g. Момент, когда initiation. In шаговый двигатель, при подаче управляющего импульса, образует ось n. s-stat РА, и Ротор делает шаг вперед. Вращение двигателя возможно при наличии пускового момента Mp. Этот момент определяется точками.
