
Оглавление:
Синхронные реактивные двигатели
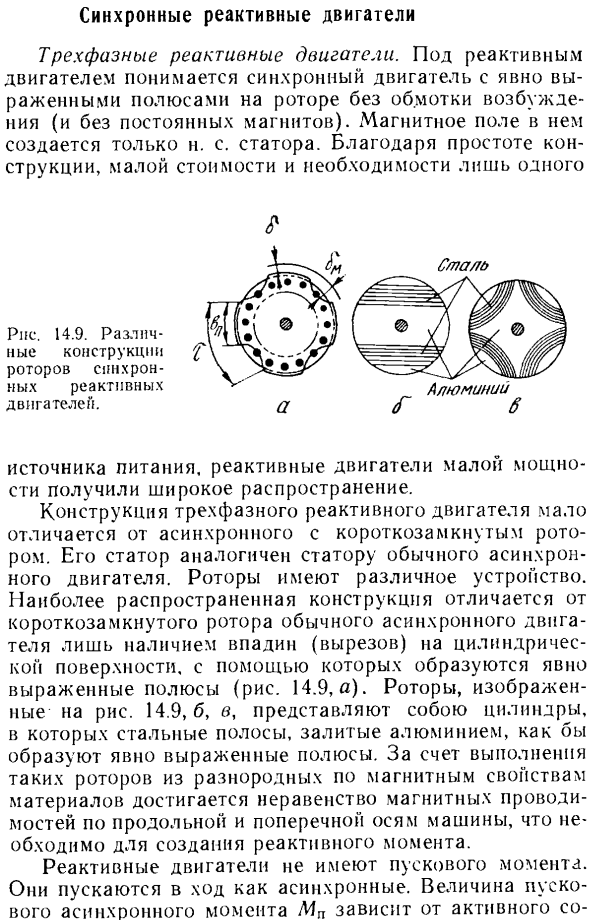
Синхронные реактивные двигатели. Трехфазный реактивный двигатель. Под реактивным двигателем понимается синхронный двигатель с разными полюсами на роторе без обмотки возбуждения (и постоянных магнитов).Магнитные требуется чтобы забронировать в нем создается только N. s статора. Простота конструкции, низкая цена, только для 1 потребности Популярны мощные, маломощные реактивные двигатели. Конструкция трехфазного реактивного двигателя практически совпадает с конструкцией асинхронного сепараторного Ротора. Ротор имеет отдельное устройство. Наиболее распространенная конструкция отличается от сепараторных роторов обычных асинхронных двигателей только тем, что на цилиндрической поверхности имеются углубления (выемки), в которых образуется выступающий полюс(рис.14.9, а).
Его статор похож на статор обычного асинхронного двигателя. Людмила Фирмаль
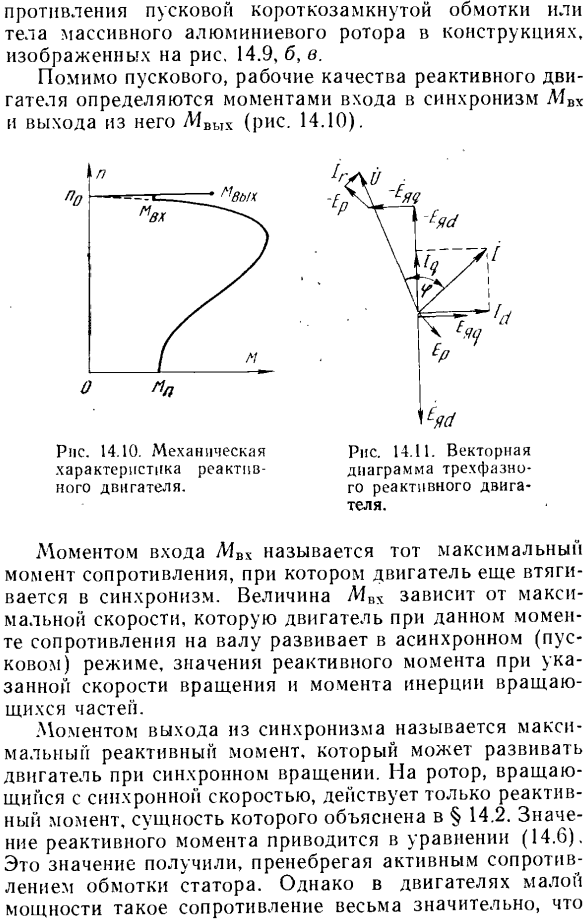
- Ротор, показанный на рисунке 14.9.6, VL, представляет собой цилиндр, в котором стальная полоса, отлитая из алюминия, образует отдельный полюс, поскольку он is. By реализуя такой Ротор из материала с различными магнитными свойствами, достигается дисбаланс магнитной проводимости вдоль продольной и поперечной осей машины. Это необходимо для создания недопустимого момента. Реактивный двигатель не имеет пускового момента. Поплавок асинхронно. Величина пускового асинхронного момента Mp зависит от пусковой короткозамкнутой обмотки конструкции, показанной на фиг. 1, или активного сопротивления корпуса большого алюминиевого Ротора. 14.9, б, в Кроме стартового двигателя, качество работы реактивного двигателя определяется моментом, когда он входит в синхронизацию l1bx и выходит оттуда из синхронизации A1B(рис. 14.10). РПС. 10/14.Механические свойства реактивных двигателей.
Впускной момент Мвх-это максимальный момент сопротивления, когда двигатель все еще синхронизирован. Величина Mvh зависит от максимальной частоты вращения, при которой двигатель будет работать в асинхронном (пусковом) режиме при заданном моменте сопротивления в валу, величины момента реакции при заданной частоте вращения и момента инерции вращающейся детали. Момент несинхронизации-это максимальный недопустимый момент, который может возникнуть у двигателя во время синхронизированного вращения. Только реактивный момент действует на ротор, вращающийся с синхронной скоростью. Его сущность описана в 14.2.Значение недопустимого момента задается в выражении (14.6).Это значение было получено путем игнорирования активного сопротивления обмотки статора. Однако в маломощном двигателе это сопротивление очень велико и влияет на характер зависимости Mp = /(0).
| Синхронные двигатели с электромагнитным возбуждением. | Синхронные гистерезисные двигатели. |
| Магнитоэлектрические синхронные двигатели. | Реактивно-гистерезисные двигатели. |
Примеры решения, формулы и задачи
| Решение задач | Лекции |
| Расчёт найти определения | Учебник методические указания |
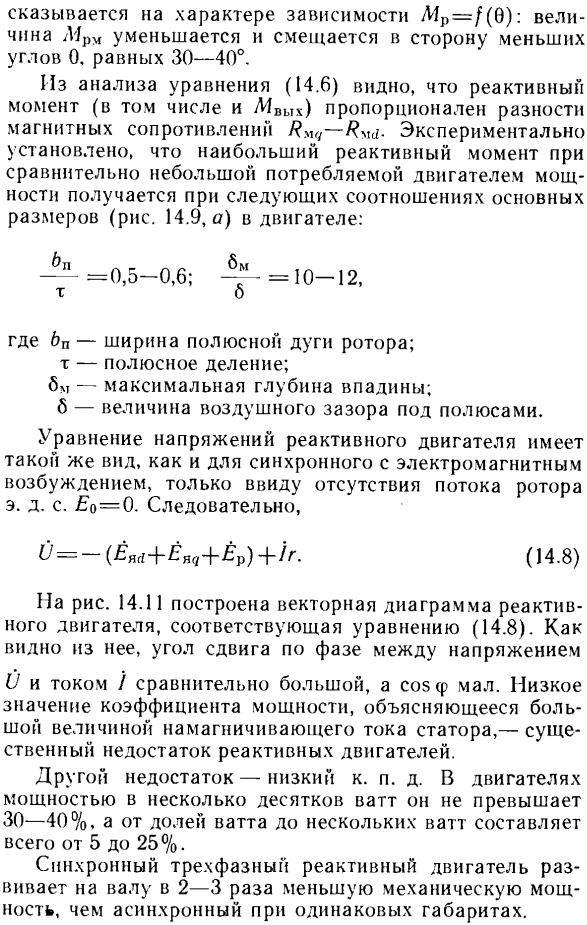
- Величина A4m уменьшается и смещается на небольшой угол 30-40, который равен 0. Анализ уравнения (14.6) показывает, что недопустимым моментом (включая MVOh) является разность магнитного сопротивления/?М /? Видно, что она пропорциональна тому, что было установлено экспериментально, что максимальный недопустимый момент при относительно небольшом расходе энергии в двигателе получается при следующем соотношении основных габаритов двигателя (рис.14.9, а). = 0.5-0.6; -^-= 10-12、о компании t bn-ширина полярной дуги Ротора. t-полярное деление; BM-максимальная глубина депрессии; b-количество пустот под полюсами. Уравнение напряжения реактивного двигателя имеет тот же формат, что и при синхронизации с электромагнитным возбуждением, поскольку отсутствует поток Ротора e. d. s Yao= 0.So … 0—(/: г* * 4-Cx <7〜| ^ p)+ / A(1 ^ −8) Па рисунке 14.11 создается векторная схема реактивного двигателя, соответствующая уравнению (14.8).
Как видно, фазовый угол между напряжениями Увы, ток/относительно велик, а СОСР невелик. Существенным недостатком реактивных двигателей является низкое значение коэффициента мощности из-за большого тока намагничивания в статоре. Еще одним недостатком 1 является низкая эффективность. На двигателе мощностью в несколько десятков ватт она не превышает 30-40%, а от доли 1 ватта до нескольких ватт-всего 5-25%. Синхронные трехфазные реактивные двигатели вырабатывают на валу в 2-3 раза меньше механической мощности, чем асинхронные двигатели тех же габаритов. Конденсаторно-реактивный двигатель.
В отличие от трехфазного конденсаторно-реактивного двигателя, статор проложен с двухфазной обмоткой. Людмила Фирмаль
- 1 (Основная) из этой фазы непосредственно подключена к однофазной сети, а другая 1 (вспомогательная) подключена к той же сети через конденсатор. Обе фазы электрически смещены на 90 градусов относительно друг друга в пространстве и, как правило, могут иметь разное число витков. Конденсаторные двигатели, работающие в однофазной сети, применяются в схемах автоматики, телемеханики, регистрирующих устройствах, бытовой технике и др. Принцип работы конденсаторно-реактивного двигателя аналогичен принципу работы трехфазной струи. Единственное отличие заключается в том, что при первом вращении ИОЛ в общем случае она овальная, а не круглая. Величина момента: Mn-начало, Mvh-начало синхронизации, M o-конец синхронизации определяется не только параметрами ротора и статора, но и характером.
