
Составные части механизма
Механизмы, независимо от функционального назначения и конструктивного исполнения, имеют общую структурную основу. Они состоят из звеньев, подвижно соединенных друг с другом. Звено — деталь или группа жестко соединенных между собой деталей (твердое звено). Кроме того, звенья могут быть гибкими (тросы, ремни, цепи).
Стойка — неподвижное звено или звено, условно принимаемое за неподвижное. Стойкой может быть станина, корпус, плата механизма и др. Относительно стойки оцениваются параметры движения механизма (перемещения, скорости и др.).
Из подвижных звеньев в зависимости от их расположения в механизме выделяют входные и выходные звенья. Входным звеном называется звено, которому сообщается движение от двигателя, выходным -звено, совершающее движение, для выполнения которого предназначен механизм. Остальные подвижные звенья механизма называются промежуточными. Механизмы могут иметь несколько входных и выходных звеньев. Например, дифференциал автомобиля при одном входном звене, получающем движение от двигателя, имеет два выходных звена, соединенных с задними или передними колесами.
Входное звено является ведущим (движущим) звеном. Остальные подвижные звенья механизма, совершающие требуемые, определенные движения, называются ведомыми. Такая классификация используется при структурном исследовании механизма. При силовом анализе механизмов разделение звеньев на ведущие и ведомые проводится по знаку элементарной работы сил, действующих на звено. У ведущих звеньев эта работа положительная, у ведомых — отрицательная или равна нулю. Поэтому входное звено, которое в структурном анализе по признаку действия является ведущим, при силовом расчете на различных участках движения может быть и ведущим, и ведомым в зависимости от знака элементарной работы сил, действующих на звено.
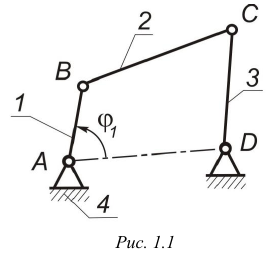
Положения всех звеньев механизма относительно неподвижного звена (стойки) задаются обобщенными координатами — независимыми переменными, полностью и однозначно определяющими положение механизма. Число обобщенных координат соответствует числу степеней подвижности механизма. На рис. 1.1 показана типичная структурная схема плоского шарнирного четырехзвенника. Здесь 1-4 — звенья; 
 — кинематические пары. Положение механизма шарнирного четырехзвенника, имеющего одну степень свободы, полностью и однозначно определяется одной координатой
— кинематические пары. Положение механизма шарнирного четырехзвенника, имеющего одну степень свободы, полностью и однозначно определяется одной координатой  (углом поворота кривошипа 1), которую можно принять за обобщенную координату.
(углом поворота кривошипа 1), которую можно принять за обобщенную координату.
За обобщенные координаты можно принять любые независимые координаты. Звено, координаты которого выбираются в качестве обобщенных координат механизма, называется начальным звеном. В большинстве случаев оно совпадает с входным звеном. Однако иногда для упрощения анализа за начальное звено удобнее принять промежуточное или даже выходное звено.
Звенья в механизмах соединяются между собой подвижно. Подвижное соединение двух соприкасающихся звеньев, допускающее их относительное движение, называется кинематической парой. Точки, линии, поверхности, по которым звенья соприкасаются, называют элементами кинематических пар.
Эта теория взята со страницы лекций по предмету «прикладная механика»:
Возможно эти страницы вам будут полезны:
| Структура (строение) механизмов |
| Шероховатость поверхностей: определение и формулы |
| Классификация кинематических пар |
| Кинематические цепи |
