
Оглавление:

Сущность проблемы автоматического управления
- Характер проблемы автоматического управления Процесс, который выполняет один человек для удовлетворения различных потребностей, представляет собой организованный и упорядоченный набор действий. Работа делится на два класса: работа и управление. Рабочие операции включают действия, которые непосредственно необходимы для выполнения процесса в соответствии с естественными законами, которые определяют ход процесса. Например, удаление стружки или вращающихся валов двигателя при обработке деталей машины. -g
Затянуть винт того же типа, заполнить много стандартных документов, выполнить большое количество стандартных расчетов и т. Д.). Для точного и качественного выполнения рабочих операций они должны быть направлены на различные типы действий — на контроль и выполнение операций, обеспечивающих начало, последовательность и конец определенных операций в нужное время.
Освободить людей от тяжелой работы, требующей больших затрат физической энергии (земляные работы, подъем грузов), вредных операций (химические, радиоактивные процессы), равномерных и утомительных операций нервной системы (при сборке) Людмила Фирмаль
Выделите необходимые ресурсы и установите необходимые параметры для самого процесса — направление, скорость, инструмент ускорения, температуру, концентрацию химического процесса и т. Д. Вся операция управления формирует процесс управления. Операции управления также могут выполняться частично или полностью техническими устройствами. Альтернатива человеческому труду в операциях управления называется автоматизацией, а технические устройства, которые выполняют операции управления, называются автоматическими устройствами.
С точки зрения управления все технические средства, такие как станок, инструмент или механизированный инструмент, который выполняет этот процесс, являются объектом контроля. Комбинация элементов управления и объектов образует систему управления. Система, в которой все рабочие и контрольные операции выполняются автоматизированным устройством, называется автоматизированной системой. Система, в которой все рабочие и контрольные операции выполняются автоматизированным устройством, называется автоматизированной системой.
Предмет теория автоматического управления тау
Примеры решения и задачи с методическими указаниями
| Решение задач | Лекции |
| Сборник и задачник | Учебник |
- Система, в которой автоматизирована только одна часть операции, а другая часть (обычно наиболее ответственная часть) управляется человеком, называется системой автоматизации (частичной автоматизации). Область управляемых объектов и операций включает в себя технические процессы и сборки, сборочные группы, мастерские, компании, человеческие группы и организации и так далее. Каждый технический процесс характеризуется сочетанием показателей, координат и физических величин, которые называются параметрами процесса. Обычно термин «параметр» в этом смысле не используется, поскольку он представляет физическую константу самого устройства.
И знания о методах управления. Имея определенный опыт, вы можете определить, что и как должна изменить система для достижения желаемых результатов. Все они устанавливаются инженерами и извлекаются из конкретных свойств, и только общие законы и методы управления и их реализация извлекаются и рассматриваются. Автоматизация требует различных видов контрольных операций.
Для реализации управления и построения управляемой системы требуются два типа знаний: во-первых, конкретные знания о конкретном процессе и его технологии, а во-вторых, принципы, общие для различных объектов и процессов. Людмила Фирмаль
Один тип включает в себя начало (содержащее), окончание (отключение) и переход (переключение) из одной операции в другую. Различные аспекты этих типов операций рассматриваются в теории переключающих устройств, а некоторые рассматриваются в теории расписаний, которая составляет предмет других курсов. Другая группа операций связана с управлением координатами и проверяет, превышает ли она допустимую границу. Эта группа операций состоит из измерения значений координат и публикации результатов измерений в формате, удобном для операторов. Работа этой группы рассматривается в теории автоматического управления.
Для точного и качественного управления процессом некоторые координаты (контролируемые координаты) должны поддерживаться в определенных пределах или изменяться в соответствии с конкретными законами. Третья группа операций управления — операции, которые поддерживают определенный закон изменения координат — изучается в теории автоматического управления, описанной в этой книге. Вам нужно контролировать значения координат, когда вы нарушаете, потому что нормальный ход процесса отличается Различные типы неисправностей — колебания нагрузки, воздействие окружающей среды или внутренний шум.
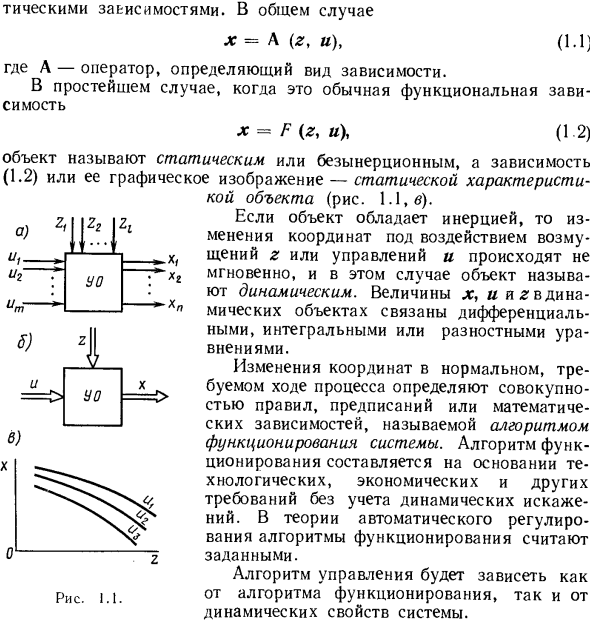
Пусть x = {*, x2, …, xn) — множество управляемых координат процесса. На показанной диаграмме 1.1, a, b объект представлен прямоугольником, и если он представляет контролируемую координату, или двойник, представляющий скалярную величину xit x2, … Выходное значение объекта представлено одной стрелкой. На этом рисунке также показан эффект возмущения z- {zj, zt% …, z,} и управляющее действие u = {«i, …, Um}, примененное к телу управления объектом в RO. Это Это изменит координату х. , Величины x и uwz связаны различными математическими зависимостями в зависимости от природы объекта.
Общий случай l: = Λ (r / u), (1.1) Где A — оператор, определяющий тип зависимости. В простейшем случае это нормальная зависимость от функции (1.2) Я и UO 5) Рисунок 1.1. значение X-F (г, у), Объект называется статическим или безинерционным, а зависимость (1.2) или его графическое изображение называется статическими свойствами объекта (рисунок 1.1.6). Если объект имеет инерцию, объект называется динамическим, потому что координаты изменяются под воздействием возмущения z или управление происходит не сразу. Количество х и динамические объекты связаны дифференциальными, интегральными или разностными уравнениями.
Изменения координат в нормальном требуемом ходе процесса определяются набором правил, норм или математических зависимостей, называемых системными алгоритмами. Функциональные алгоритмы составляются на основе технических, экономических и других требований без учета динамических искажений. В теории автоматического управления функционирующий алгоритм считается предустановкой. Алгоритм управления зависит как от функционального алгоритма, так и от динамических характеристик системы.
