
Оглавление:

Условия равновесия несвободного тела
- В§2.3, 4.4 и 6.3 получены необходимые и достаточные условия равновесия свободных твердых тел, условия равновесия ранее несвободных тел. Для несвободных тел эти условия применимы, используя аксиому связи. В этом случае часть условия равновесия
превращается в уравнение, из которого можно определить реакцию, происходящую в самой связи. В случае строго фиксированного объекта все уравнения содержат реакции связывания и служат только для их определения.
73 вопрос о равновесном состоянии несвободного твердого тела возникает только тогда, когда связи, Людмила Фирмаль
наложенные на тело, не фиксируют его жестко. В этом случае только часть уравнения, полученного с помощью аксиомы связи, содержит реакции связи и помогает их определить. Остальные уравнения дают соотношение между заданными силами или положение, в котором возможно равновесие тела, то есть условие его равновесия. Таким
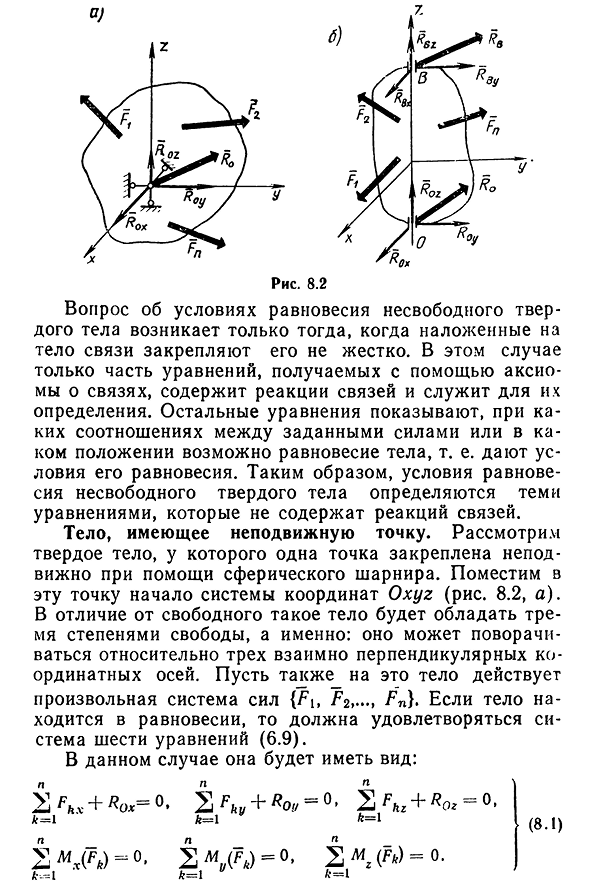
образом, равновесное состояние несвободных твердых тел определяется уравнениями, не включающими в себя реакции связывания. Тело с неподвижной точкой. Рассмотрим твердое тело, в котором одна точка неподвижно закреплена сферическим шарниром. В этой точке поставим начало координат системы Oxyz (рис. 8.2, а). В отличие от свободы, такое тело будет иметь три степени свободы, а
- именно: также любая система сил{F[t F2, будем действовать на это тело.>., Fn}>если тело находится в равновесии, то должно быть выполнено шестое уравнение системы(6.9). В данном случае,+лиса=с+^О такие=0,2 fhz по+Роз=*=1к=\к=(8,я)2^) = °-я в)=0 и^(fтр)=о. Здесь Rox, Roy и Roi-проекция реакции в сферическом шарнире на соответствующие координатные оси. Поскольку начало координат системы координат находится в центре сферического
шарнира, то момент от реакции, возникающей для всех осей, равен нулю, а последние три уравнения уравнения (8.1) следовательно, главный момент данной силовой системы в точке O, Mo, равен нулю, т. е. эта система сводится к результату (§6.2), а ее действие-равновесное состояние объекта с неподвижной точкой-это алгебраическая сумма моментов всех сил, действующих на тело относительно трех координатных осей, перпендикулярных друг другу.: 2Mx (Fk)=0,^M(Fh)=0, 2 l 1g(S,)=0. (8.2) Фе=л л=1к=л
Из первых трех уравнений _ (8.1) можно определить предсказание неизвестной реакции/?0, следовательно, найти его модуль и направление. Тело с Людмила Фирмаль
неподвижной осью. В этом случае тело будет обладать определенной степенью свободы. 8.2, б). Уравнение равновесия (6.9) принимает вид: k=l k=l 1Fkz+Roz+RB^0,2+m I (/?0)+L f W)=o, А=1 к=\ i x (h)=°-(b-3 ) L=1L-1 Первые пять уравнений в уравнении (8.3) связаны с реакциями соединений O и B. конец этих уравнений не содержит неизвестной реакции,они пересекают ось g и таким образом равновесное состояние объекта с постоянной осью вращения не является.、- 75º сумма моментов всех сил, действующих на тело относительно его оси, была равна нулю. 1 м г(?) K}=0 — (8-4)
Смотрите также:
| Положение центров тяжести фигур сложной формы | Условие равновесия тела, имеющего опорную плоскость |
| Устойчивые и неустойчивые формы равновесия | Расчет статически определимых систем |
