
Оглавление:

Устойчивость движения по первому приближению
- В большинстве случаев решение задачи определения устойчивости движения прямым методом интегрирования дифференциальных уравнений возмущенного движения не может быть осуществлено, так как невозможно получить решение в замкнутом виде. В связи с этим предложен широкий спектр методов определения устойчивости движений в первом приближении. Этот метод подходит для a. M.
Он был известен задолго до появления классических работ Ляпунова общие проблемы устойчивости движений, 1892. Однако в первом приближении были установлены условия для определения устойчивости движения исходной системы. М. Ляпунов, движение которых описывается нелинейными дифференциальными уравнениями. Вот как определить устойчивость движения в первом приближении пусть это будет Л-Л О. Л А 0….. л. Является частным решением системы дифференциальных уравнений первого порядка 0 2. При заданных начальных условиях перемещения Л Ло л УП u f 0. 3 Решение 1 определяет непертурбативное движение системы.
Если векторная сумма импульсов внешних сил системы равна пулю, то главный вектор количеств движения системы материальных точек т. Людмила Фирмаль
При других начальных условиях движения значение переменной y , определяющей движение системы, может быть выражено в виде Л- 4 Уравнение 2 принимает вид ТТ — — Ж— 1 Л 0. ….и. стебель.-. 1 С каждым соответствующим уравнением b уравнение 2 и вычесть And8 Для краткости покажите правую часть этих уравнений икс. … х Т 0 b 0 t — r U 0 4 4 7 получена система дифференциальных уравнений возмущающего движения 8 Из 7 Х 0, 0,…. 0, o o 9 И так оно и есть. Х1 Х1… xa 0 10 Это конкретное решение 8 системы, которое соответствует движению без возмущений.
Для учета устойчивости в первом приближении одновременных уравнений 8 линейные члены выделяются на основе right. In кроме того, только тогда, когда время явно не введено в правой части уравнения 4 е а й ФЛ Х ф — й ХД 11 Где а а я Х Х — Х-ОА с 2 или более относительно переменной x. Затем, чтобы исследовать устойчивость, мы строим систему, которая дает результат из 11, отбрасывая нелинейный член до первого приближения. 12 найти характеристическое уравнение системы N 12 ОК d1rn-1 рН — 4 -… n 0 13 Согласно первой теореме Ляпунова, непертурбативное движение, определяемое уравнением 1, устойчиво, если все корни характеристического уравнения 13 имеют отрицательное вещественное part.
В этом случае отброшенный нелинейный член 11 в правой части уравнения не влияет на устойчивость движения. Согласно теореме 2-го Ляпунова, если в корнях характеристического уравнения 13 имеется хотя бы 1 корень с положительной вещественной частью, то непертурбативное движение, определяемое уравнением 1, равно unstable. In в этом случае отброшенный нелинейный член 11 в правой части уравнения не может повлиять на устойчивость движения. Таким образом, данное исследование в качестве начального приближения позволяет окончательно ответить на вопрос об устойчивости движения в случае, когда корни характеристического уравнения имеют отрицательную или положительную вещественную часть.
Если корень характеристического уравнения имеет действительную часть нуля, то есть ноль или чисто мнимый корень, то определить устойчивость движения в первом приближении невозможно. А. M. As Ляпунов указал, что в этих случаях, которые называются критическими, необходимо рассматривать члены первого следующего порядка дифференциального уравнения. О знаке корней характеристического уравнения можно судить на основании теоремы фульвиса, которая формулируется следующим образом уравнение степени l с вещественными коэффициентами w 0 a9xp a1xp-1 a1xl — … aa 0 14 Если все корни имеют отрицательную действительную часть, то все Определитель типа л-1 1 A 01 а da 1, в г а. Но… 0 0…
Ноль 4 дюйма О… 0 16 Positive. Кроме того, для I n, при 0 это условие необходимо и достаточно. При решении задачи определения устойчивости движения системы в первом приближении рекомендуется следующая процедура. 1 определить число степеней свободы системы и выбрать обобщенные координаты. 2 Создание дифференциальных уравнений непертурбативного движения с использованием уравнения Лагранжа. 3 Создайте дифференциальное уравнение возмущенного движения. Предположим, что обобщенные координаты и обобщенная скорость возмущенного движения отличаются от значений возмущенного движения малым значением 1-го порядка. 4 в полученном дифференциальном уравнении отбросьте меньшие члены 2 или более.
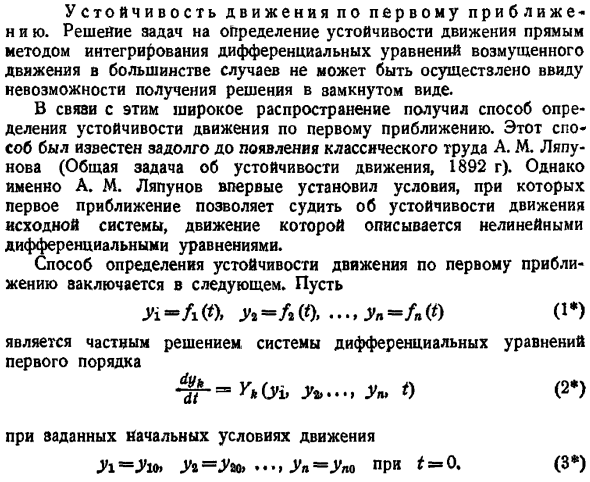
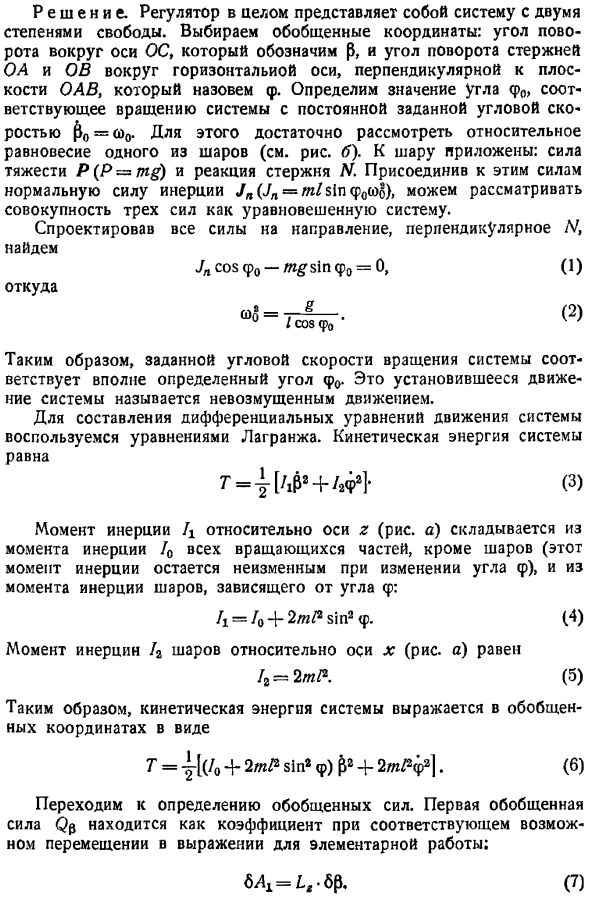
Вычитание соответствующего дифференциального уравнения невозмущенного движения из дифференциального уравнения возмущенного движения. 6 Создайте характеристическое уравнение для линейной системы дифференциальных уравнений вариации с постоянными коэффициентами. 7 используя теорему харвица, определите действительный знак части корней характеристического уравнения и судите об устойчивости движения исходной системы. Задание 18.50.Регулятор Ватта центробежный конструирован для поддержания равномерного вращательного motion. It состоит из 2 стержней OA и OV одинаковой длины I, закрепленных шарниром в подвижной точке O. концы стержней имеют по шарику массой m рис. а.
Муфта C, которая может скользить вдоль вертикальной оси с помощью 2 стержней CE и DC, соединена шарниром со стержнем, несущим шарик. Мяч считается важным point. As скорость угла поворота увеличивается, шарик расходится, муфта C поднимается, а вход пара decreases. As угловая скорость уменьшается, шар приближается, муфта с уменьшается, а отверстие на входе пара увеличивается. Игнорирование массы штока и муфты, а также силы трения, определяет устойчивость движения регулятора. Момент инерции вращающейся части относительно вертикальной оси равен 0 за исключением шара.
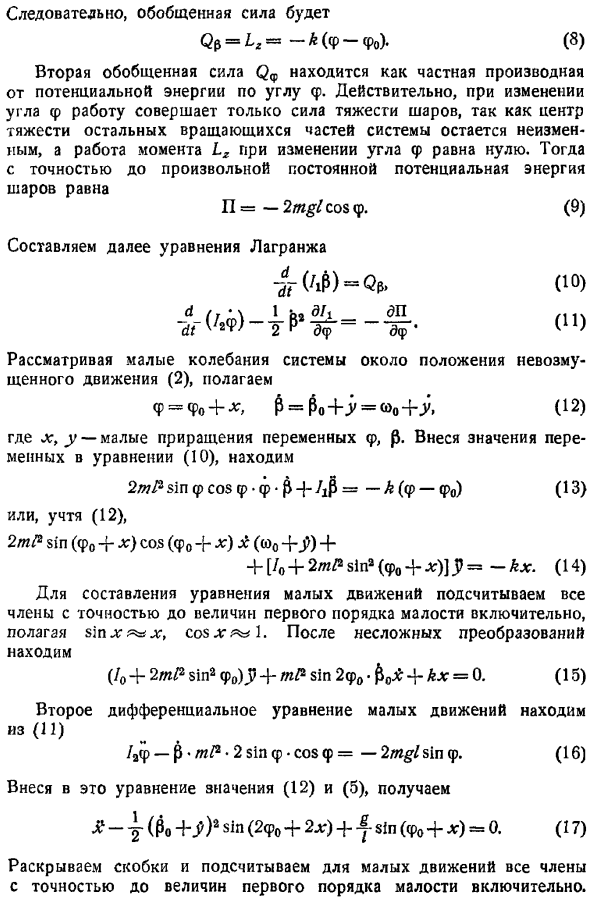
- Восстанавливающий момент, вызванный отклонением угла от невозмущенного значения p0 Б — а. Где A-положительный коэффициент константы. Решение. Весь регулятор представляет собой систему с 2 степенями свободы. Выберите обобщенные координаты выберите угол поворота представленный p вокруг оси OS и угол поворота называемый f вокруг горизонтальной оси, перпендикулярной плоскости OAW, стержней OA и OV. Постоянная угловая скорость p0 o0 определяет величину угла 0, соответствующую вращению system. To для этого достаточно рассмотреть 1 относительное равновесие шара см. Рисунок Б. На шаре реакция силы тяжести P P mg и стержня N равна applied.
Добавляя к этим силам вертикальную инерционную силу Jn Jn ml sin sin o , комбинацию из 3 сил можно рассматривать как сбалансированную систему. Если мы проецируем все силы в направлении, перпендикулярном Н Ин с COS Р0-отъ sin9i 0, 1 Откуда Таким образом, заданная угловая скорость вращения системы соответствует четко определенному углу p0.Это устойчивое движение системы называется движением без возмущений. Для создания дифференциальных уравнений движения системы используйте уравнение Лагранжа. Кинетическая энергия системы г-я момент инерции вокруг оси z рис.
Отсутствие внутренних сил в формулировке теоремы об изменении главного вектора количеств движения системы материальных то-чек значительно упрощает решение соответствующих задач. Людмила Фирмаль
А представляет собой сумму момента инерции 0 этот момент инерции не изменяется при изменении угла всех вращающихся частей, кроме шара и момента инерции шара в зависимости от угла. D gothrup F. 4 Момент инерции для оси x шара Za рисунок A равен 4 2iA b Итак, кинетическая энергия системы выражается в обобщенных координатах вида Т г 0 ИМП грех Р 2ОТ объема 2-факторную авторизацию. 6 Переходим к определению обобщенных сил. Первая обобщенная сила Qg найдена как коэффициент с соответствующим возможным смещением в Формуле элементарной работы. В результате обобщенная сила равна Qp L, — A -Фо. 8 2-я обобщенная сила Q найдена как частичная производная потенциальной энергии относительно угла.
Дело в том, что при изменении угла центр тяжести оставшейся вращающейся части системы не изменяется, и только сила тяжести шара выполняет свою работу, так как работа момента L при изменении угла равна нулю. Затем до любой постоянной потенциальной энергии Шар равен П — 2mgl cosф. 9 И тогда мы создадим уравнение Лагранжа. е я-ВЦ. У И Учитывая малую вибрацию 2 системы вблизи положения непертурбативного движения 4- 0 0 л 12 Где x, y-малые приращения переменных, p.
Вводя значение переменной в выражение 10 2da 281PfC08f-f — 1 — А ф-фо 13 Или обсудить 12 2ТП грех 0 х с COS 0×0 Дж 2ТП грех г о Х ф -КХ. 14 Чтобы создать небольшое уравнение движения, установите sinx sx, cos x 1, чтобы всесторонне вычислить все члены до небольшого значения 1-го порядка. После простой трансформации 0 2tp sin3 pho J 4-tP sin 2ph0 M kx 0. 15 Дифференциальное уравнение 2-го порядка для малых движений найдено из 11 4рн-р л 3 2 sin cos — 2mgl sin. 16 Путем введения значений 12 и 5 в это уравнение Я-г 0 j и 4 2 0 2х — грех 0×0. 17 Откройте скобки и для небольших перемещений вычислите все члены до небольшого значения в 1 порядке.
После простого преобразования с учетом уравнения 2 I — 0sin 2 p0 j cos0 p0- ED cossatp0×0. 18 Таким образом, мы получаем систему из 2 дифференциальных уравнений 15, 18 малых перемещений system. To решить эту систему линейных уравнений с постоянными коэффициентами, установить х С1Е, 19 Где КБ и КП являются постоянными величинами. Подставляя эти значения в уравнения 15, 18 и сводя их к общему коэффициенту ef , получаем характеристическое уравнение top sin Фо р phtn фо 1 2 COS ФО — a — 051n2Fo 0. 20 Проще говоря, это уравнение записывается как oP 13 0, где АО 2 p slnl Po. 1 0.
Форма условия Гурвица для отрицательности вещественной части корня уравнения 3-го порядка имеет вид С1 0 Я подумал Оу. aia, — ААА 0 0 0 Я ОЖ а, а, 0, 010 -Ааво 0. 1 0 al 23 В этом случае условия Гурвица не выполняются, поскольку o0 0, oa 0, os 0, o 0, и поэтому малые перемещения регулятора при сделанных предположениях неустойчивы.
Это обстоятельство создает необходимость введения дополнительных звеньев в регуляторную систему, поскольку они были установлены экспериментально довольно давно. Задание 18.51. Уравнение возмущенного движения системы с 1 степенью свободы определяется уравнением ван дер поля А а −1 а x 0, ЖЖ Где A 0.Исследуйте стабильность движения. Решение 2 уравнений Опишите уравнение движения 1 в виде системы ДХ ДТ 2 Это приемлемо, потому что если вы вычислите производную по времени из 2-го уравнения 2 системы и введете значение в соответствии с первым уравнением 2 системы, она вернется к исходному уравнению 1.
Для определения устойчивости возмущенного движения в первом приближении линеаризуем систему 2 и отбрасываем члены над десятичными дробями 1 порядка. 3 4 Создайте характеристическое уравнение для системы, — о. Я-1 −1 Если вы расширяете массив X — CA 1 0. 5 Корни характеристического уравнения 5 имеют вид 1, а г-1- 6 Если 2 2, то оба корня действительны и положительны. При 2 оба корня являются комплексными числами с положительными вещественными частями.
Смотрите также:
Предмет теоретическая механика
