
Оглавление:

Вынужденные колебания твердого тела при резонансе
- Дифференциальные уравнения твердых тел составляются по общим правилам, указанным в пунктах 4 и 5 настоящей главы, 3, g. При решении задачи определения вынужденной вибрации твердого тела при резонансе приводятся следующие утверждения и следующие утверждения. 1 Выберите обобщенные координаты. 2 Создайте дифференциальное уравнение движения твердого тела 1el, используя уравнение Лагранжа или общую теорему динамики. 3 найти частоту свободной вибрации резонансную частоту, учитывая задачу о свободной вибрации тела.
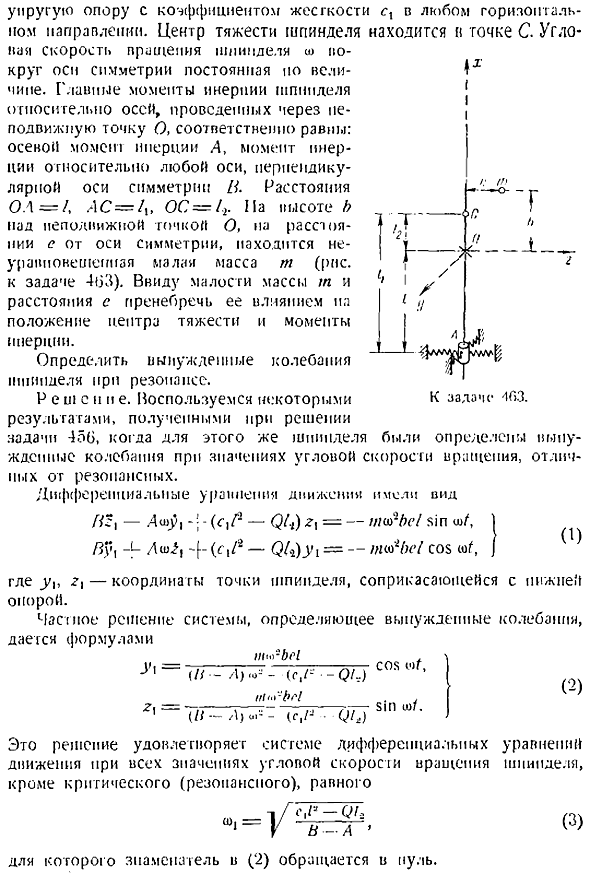
В случае резонанса найти конкретное решение для неоднородной системы дифференциальных уравнений движения и сначала наложить общее решение для однородных систем, чтобы получить искомое общее решение задачи. Задача 463. Определяет вынужденное колебание шпинделя шпиндель, который поворачивается неподвижно в точке o и имеет точку 1 Решение было принято. Упругая опора с произвольным коэффициентом горизонтальной жесткости c1. Центр тяжести шпинделя находится в точке с. Скорость вращения шпинделя вокруг оси симметрии w постоянна по величине.
Для определения скорости парашютиста в момент приземления нецелесообразно повторить решение предыдущей задачи, так как при интегрировании по времени мы находим проекцию скорости х и координату х в виде функций времени. Людмила Фирмаль
Основные моменты инерции шпинделя для оси, проходящей через неподвижную точку o, равны момент инерции оси d, момент инерции оси, перпендикулярной оси симметрии y, расстояние инерции до оси o. 4, ls, os 2. Высота b над неподвижной точкой 0, расстояние e от оси симметрии имеет несбалансированную малую массу m задача на рис. 463. Игнорировать влияние на положение и момент инерции центра тяжести, принимая во внимание малость массы m и расстояния c. Определите вынужденную вибрацию шпинделя во время резонанса. Решснп. Для того же шпинделя используют некоторые результаты, полученные при решении задачи 456. Вибрация, которая ожидается при угловой скорости, отличной от резонансной скорости.
Дифференциальное уравнение движения ar, — dshr — c y −04 р ы-ты l181 Н ШБ-ч л — с 2 — гг — г Л1 сотрудничества Где s, 2y-Координата точки контакта шпинделя с нижней опорой. Конкретное решение системы для определения вынужденного колебания задается формулой n1y БМ О 2 г НЛ. 2 — с 2. , 5 Пи — Это решение удовлетворяет системе дифференциальных уравнений движения для всех значений угловой скорости шпинделя. 2 знаменатель исчезает.
- Из уравнения 2 следует, что при вынужденном колебании точка с координатой 3 нарисует окружность с радиусом. Ноль При угловой скорости вращения равной величине угловой скорости вращения шпинделя вокруг оси symmetry. In кроме того, поскольку угол между направлениями угловой скорости меньше −2, прямая прецессия оси при угловой скорости по модулю угловой скорости вращения шпинделя соответствует вибрации шпинделя, вызванной дисбалансом.
Неуравновешенный sp при вынужденной вибрации, вызванной шпинделем, резонансная вибрация соответствует 2-му значению критической скорости вращения с — И затем Т Я не просыпаюсь. Определите закон вынужденных колебаний шпинделя в резонансе, если угловая скорость шпинделя равна критической величине. Тогда в визе должно быть найдено конкретное решение системы дифференциальных уравнений i, обусловленное ее структурой. 3, −51 1о g1 7, соя ж. Вычислите 1-ю и 2-ю производные от 3 1 и времени и подставьте полученную формулу в Систему 1 — doc, n −7 7 г — г n 2 — 1 — С −1 11 потому что — ТМЦ 8 П ш 12dt о — потому что о 1— 4 0 — — Р — 2А 1 51n ж — потому что ж.
Вертикальный спуск парашютиста происходит без начальной скорости с высоты И при наличии силы сопротивления, указанной в условии предыдущей задачи. Людмила Фирмаль
Эти уравнения должны быть действительны в любое время, поэтому коэффициенты левого и правого w, cos w, y w и g cos w должны быть equalized. As в результате мы получаем 2 уравнения для определения 4 неизвестных. −2 г — Дшг, — собака d Отличительной особенностью этой системы является то, что решение первых 2 уравнений полностью удовлетворяет другим equations. In другой путь 1 г Я Н -. 4,. Т БФ ВС1 9 Итак, уравнение вынужденной вибрации нижней головки шпинделя в резонансе выглядит следующим образом У Из этих уравнений видно, что при резонансе вынужденные колебания соответствуют обратной прецессии СПП ОСП на шпинделе.
Если угловая скорость ниши меньше критической 3, то, как видно из Формулы 2, знаменатель с правой стороны будет отрицательным. Таким образом, ось шпинделя производит прямую прецессию, и во время резонанса колебания увеличиваются в ответ на образную прецессию оси шпинделя.
Смотрите также:
Предмет теоретическая механика
