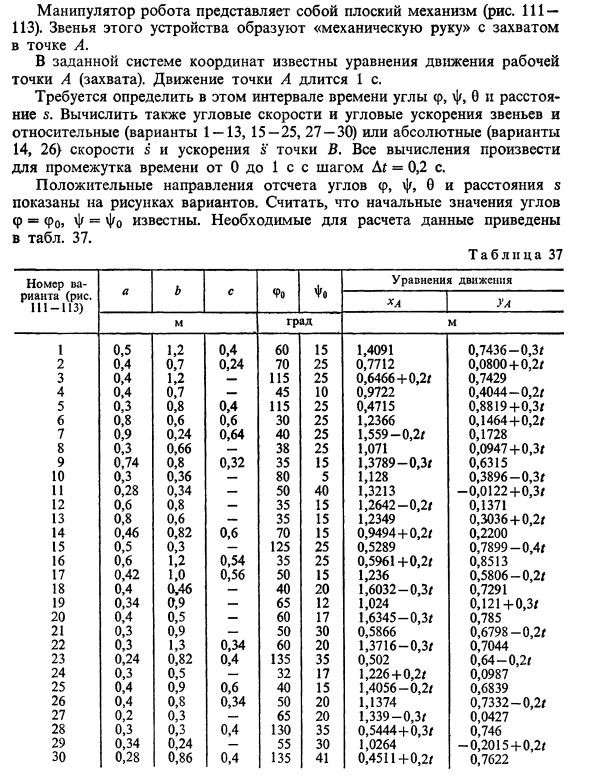
Задача 18. Манипулятор робота представляет собой плоский механизм (рис. 111 — 113). Звенья этого устройства образуют «механическую руку» с захватом в точке А. В заданной системе координат известны уравнения движения рабочей точки А (захвата). Движение точки А длится 1 с. Требуется определить в этом интервале времени углы ф, |/, 0 и расстояние s. Вычислить также угловые скорости и угловые ускорения звеньев и относительные (варианты 1 — 13, 15—25, 27 — 30) или абсолютные (варианты 14, 26) скорости s и ускорения s точки В, Все вычисления произвести для промежутка времени от 0 до 1 с с шагом At = 0,2 с. Положительные направления отсчета углов ср, |/, 0 и расстояния s показаны на рисунках вариантов. Считать, что начальные значения углов ф = ф0, vj/ = v|/0 известны. Необходимые для расчета данные приведены в табл. 37.
| Задача 16 | Задача 19 |
| Задача 17 | Задача 20 |