
Оглавление:
Готовая курсовая работа по теории автоматического управления.
Теория автоматического управления дает знания по основным принципам функционирования, исследования и построения таких систем. Она является общетехнической дисциплиной и изучается студентами бакалавриата разных специальностей технических вузов в течение двух семестров
| Если что-то непонятно — вы всегда можете написать мне в WhatsApp и я вам помогу! |
Теория автоматического управления
Теория автоматического управления (ТАУ) является одной из важных общетехнических дисциплин, в которой изучаются основные принципы исследования и построения автоматических систем управления, т.е. систем, функционирующих без непосредственного участия человека. Автоматические системы управления широко используются в повседневной жизни. Для поддержания напряжения в заданных пределах используется система управления напряжением генератора. В самолетах автоматические системы управления используются для поддержания заданного курса, высоты и других параметров движения. Они нужны для поддержания заданного технологического процесса и т.д.
Основные сведения о системах автоматического управления
Необходимость поддержания постоянства или изменения той или иной величины в соответствием с некоторым законом часто возникает в различных технических, да и не только технических системах.
Например, при наборе высоты, перед тем как лечь на требуемый курс, пилот самолета управляет величиной тяги двигателя, рулями высоты, курса и т.п. При этом изменяются требуемым образом скорость самолета, его высота и курс. В этом случае мы говорим о ручном управлении.
Когда требуемая высота полета самолета набрана, ее постоянство, постоянство скорости и курса поддерживается специальным автоматическим прибором — автопилотом и в этом случае осуществляется автоматическое управление.
Другой пример автоматического управления, но уже не в технической системе. В организме человека существует множество систем поддерживающих его жизнедеятельность. Например, в здоровом организме поддерживается постоянство температуры тела, артериального давления, происходит расширение или сужение зрачков глаз в зависимости от освещенности и т.п.
Возможно эта страница вам будет полезна:
| Предмет теория автоматического управления тау |
Итак, когда же возникает необходимость в управлении? Эта необходимость возникает тогда, когда объекты управления самолет и человек не могут «сами по себе», первый функционировать, а второй жить. Рассмотренные объекты сами не могут достичь цели своего существования и в процессе работы устранять отклонение параметров функционирования от заданных.
Что же называется управлением? Создание условий, обеспечивающих требуемое протекание процессов в объекте управления, называется управлением.
Существуют три типа объектов управления:
- Устойчивые.
- Нейтральные.
- Неустойчивые. Рассмотрим их.
Объект называется устойчивым, если он обладает свойством возвращаться к своему исходному состоянию после устранения причин, вызвавших изменение этого состояния.
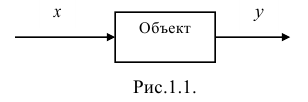
На Рис. 1.1 изображен объект, на вход которого поступает ступенчатый периодический сигнал х, принимающий значения 0 и 4.
На Рис. 1.2 изображены входной сигнал х (верхний график) и выходной сигнал у (нижний график). Как следует из рисунка, в том случае когда входной сигнал принимает нулевое значение, то есть устраняется причина, вызвавшая изменение состояния объекта, выходной сигнал через некоторое время также становится нулевым.
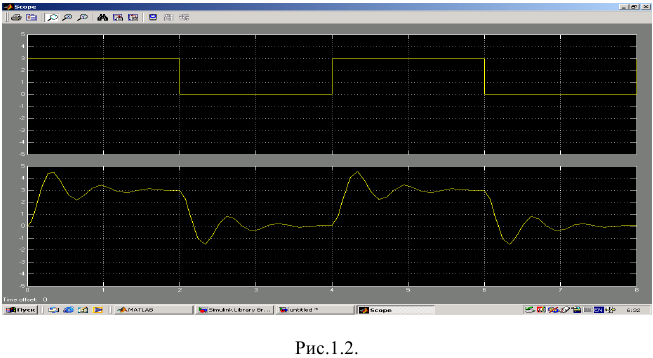
Следовательно, объект на Рис.1 Л является устойчивым. Устойчивые объекты в принципе могут функционировать самостоятельно без управляющих устройств.
Предположим теперь, что объект, изображенный на Рис. 1.1 является нейтральным. На Рис. 1.3 представлены графики изменений входного (верхний график) и выходного (нижний график) сигналов.
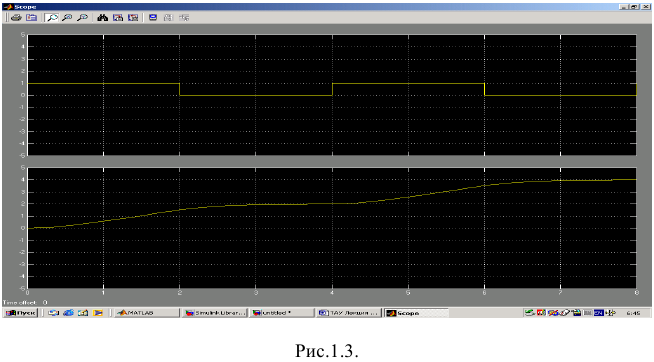
Как следует из графиков, после устранения возмущения, то есть когда входной сигнал принимает нулевое значение, выходной сигнал перестает изменяться, но в исходное состояние не возвращается. Значение выходного сигнала зависит от момента прекращения действия входного сигнала.
Нейтральные объекты не могут функционировать без управляющих устройств.
Существует объекты, например ядерный реактор, или самолет в режиме штопора, поведение которых таково, что даже после устранения возмущения их выходные величины (мощность реактора, скорость самолета), возрастают. Такие объекты являются неустойчивыми. На Рис. 1.4 представлены графики изменений входного и выходного сигналов неустойчивого объекта.
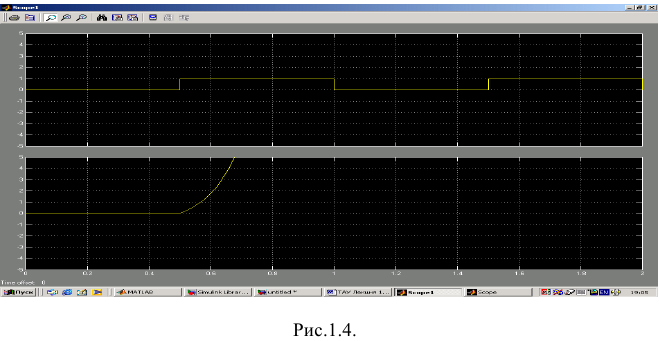
На Рис. 1.5 представлен полный график изменения выходного сигнала неустойчивого объекта. Как видно, выходной сигнал за короткое время существенно вырос. И даже когда входной сигнал принимает нулевое значение, то есть устраняется причина, вызвавшая изменение состояния объекта, выходной сигнал продолжает расти.
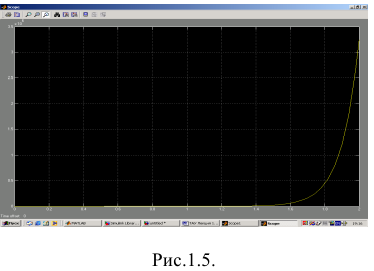
Необходимо отметить, что в принципе неустойчивый объект не может функционировать без управляющего устройства.
Объект, в котором осуществляется управление или регулирование, называется управляемым или регулируемым объектом. Величины, характеризующие процесс, протекающий в управляемом объекте, называются управляемыми величинами.
Управляемый объект вместе с управляющим устройством образуют автоматическую систему, иначе систему автоматического управления (САУ).
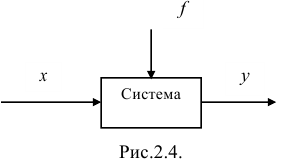
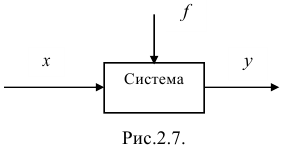
Рассмотрим объект управления

Здесь

вектор управляющих воздействий, приложенных ко входу объекта. Обычно управляющие воздействия прикладываются к управляющему органу объекта, который составляет неразрывное целое с объектом, например штурвал управления самолетом, или педаль газа у автомобильного двигателя.
- вектор управляемых величин (координат) объекта.

- вектор возмущающих воздействий, действующих на объект управления.
Принципы управления
САУ может функционировать в соответствии с тремя основными принципами управления:
- Принцип разомкнутого управления
- Принцип компенсации
- Принцип обратной связи
Принцип разомкнутого управления
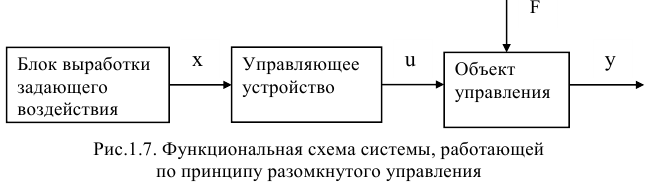
по принципу разомкнутого управления
 — задающее воздействие
— задающее воздействие  — управляющее воздействие
— управляющее воздействие  — возмущающее воздействие
— возмущающее воздействие  — управляемый выходной сигнал
— управляемый выходной сигнал
Принцип компенсации
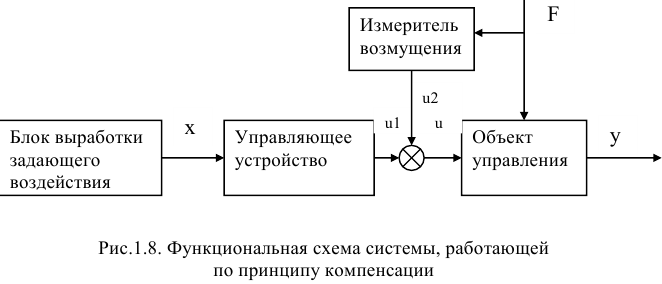
Управляющее воздействие  формируется из выходных сигналов управляющего устройства
формируется из выходных сигналов управляющего устройства  и измерителя
и измерителя  таким образом, чтобы скомпенсировать влияние помехи на объект управления.
таким образом, чтобы скомпенсировать влияние помехи на объект управления.
Принцип обратной связи
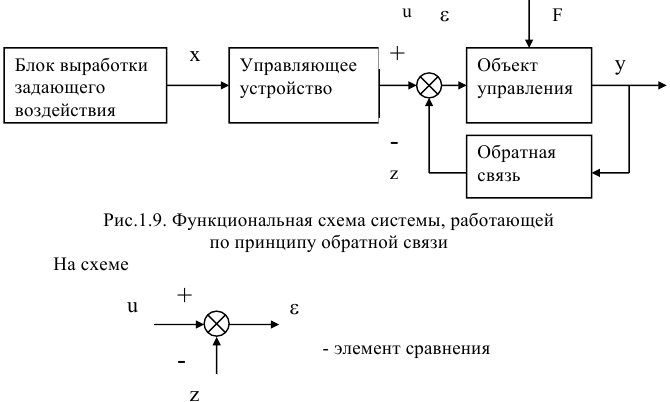
Блок обратной связи осуществляет измерение управляемого сигнала  и подачу на вход объекта управления сигнала обратной связи
и подачу на вход объекта управления сигнала обратной связи  . В цепи обратной связи направление сигнала противоположно направлению сигнала в прямой цепи, поэтому и существует название — обратная связь. Обратная связь в системе образует замкнутый контур, поэтому говорят, что система построена по замкнутому принципу (другое название принципа обратной связи). Элемент сравнения сравнивая сигналы управления
. В цепи обратной связи направление сигнала противоположно направлению сигнала в прямой цепи, поэтому и существует название — обратная связь. Обратная связь в системе образует замкнутый контур, поэтому говорят, что система построена по замкнутому принципу (другое название принципа обратной связи). Элемент сравнения сравнивая сигналы управления  и обратной связи , формирует сигнал отклонения, или ошибки управления
и обратной связи , формирует сигнал отклонения, или ошибки управления  . Поэтому такой принцип управления называют управлением по ошибке (еще одно название принципа ОС).
. Поэтому такой принцип управления называют управлением по ошибке (еще одно название принципа ОС).
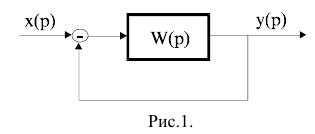
Обычно САУ, в которых реализован принцип обратной связи имеют следующую функциональную схему (упрощенный вид)
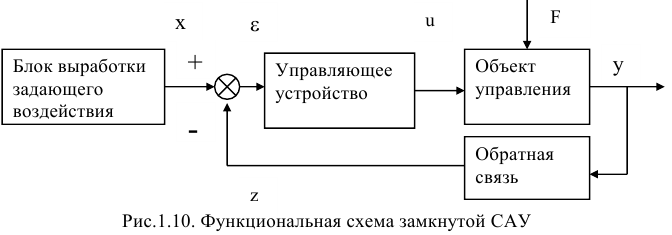
В рассмотренной САУ управление осуществляется по отклонению управляемой величины  от заданной величины
от заданной величины  , путем сведения отклонения (ошибки управления)
, путем сведения отклонения (ошибки управления)

к нулю.
Возможно эта страница вам будет полезна:
| Примеры решения задач по теории автоматического управления |
Основные законы управления
Под законом управления понимается математическая зависимость, в соответствии с которой формируется управляющее воздействие, подаваемое на объект управления. В зависимости от решаемых задач, существует большое количество законов управления. Однако наиболее распространенными являются законы управления по отклонению, интегралу от отклонения и первой производной по времени.
Управляющее устройство, осуществляющее закон управления по отклонению, называют пропорциональным (П)

 — коэффициент передачи управляющего устройства.
— коэффициент передачи управляющего устройства.
Математическая зависимость, соответствующая интегральному закону управления (И) имеет вид
 — постоянная времени интегрирования.
— постоянная времени интегрирования.
Пропорционально-интегральный закон (ПИ) запишем в виде
И, наконец, наиболее общим является пропорционально-интегрально-дифференциальный закон (ПИД)
где  — постоянная времени дифференцирования.
— постоянная времени дифференцирования.
Проведем моделирование работы нейтрального объекта, описываемого дифференциальным уравнением 2-го порядка, с помощью математического пакета MATLAB 6.
На Рис. 1.11 приведена схема моделирования, содержащая нейтральный объект управления, на вход которого подан ступенчатый сигнал. Входной и выходной сигнал объекта отображаются на графиках Рис. 1.12.
На Рис. 1.11 также изображены схемы замкнутых систем управления с обратной связью, в которой реализованы П, ПИ и ПИД законы управления. На вход этих схем подается ступенчатый сигнал, а их выходные сигналы отображены на графиках Рис. 1.12.
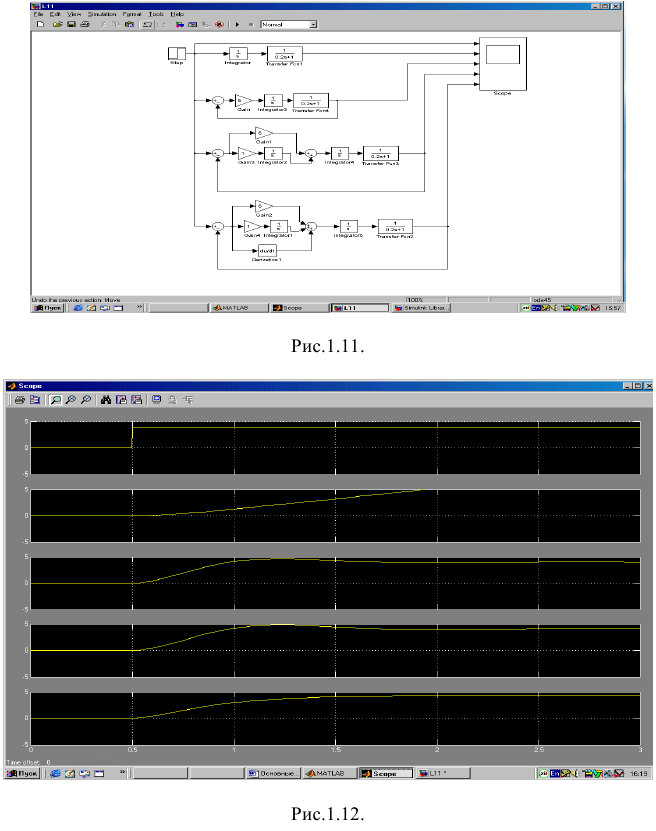
Из приведенных графиков видно, что объект без управляющего устройства работать не может, так как при подаче на вход ступенчатого воздействия, его выходной сигнал растет.
При подключении к объекту обратной связи и реализованным пропорциональным (П) законом управления, выходной сигнал, сначала превысив установившееся значение, с течением времени стремится к нему.
Аналогичный результат был получен и при применении пропорцио-нально-интегрального (ПИ) закона управления.
При использовании пропорционально-интегрально-дифференциального (ПИД) закона управления был получен лучший результат — выходной сигнал монотонно стремился к установившемуся значению.
Выбор того или иного закона управления зависит от объекта управления и той цели, которой мы хотим достичь, применяя тот или иной закон.
Возможно эта страница вам будет полезна:
| Решение задач по ТАУ |
Математические модели систем автоматического управления
Математическая модель системы математически описывает процессы в ней протекающие и связывает ее входы и выходы:
в виде алгебраических, дифференциальных, разностных и др. уравнений;
- графически в виде графиков, структурных схем или графов;
- таблично в виде таблиц.
При построении той или иной математической модели, особенно на начальном этапе исследования, приходится вводить целый ряд допущений, упрощающих модель. Например предположить линейность модели, то есть предположить, что вход и выход модели связаны линейно. Вторым допущением могло бы быть упрощающее предположение о том, что в системе действуют только детерминированные сигналы.
На дальнейших стадиях исследования модель может быть усложнена. Нужно помнить, что при построении модели всегда приходится идти на компромисс между простотой модели и ее адекватностью, то есть степенью соответствия реальным процессам, протекающим в САУ. Нужно стремиться к возможно более простому математическому описанию системы, не потеряв при этом главного — как можно полнее и точнее отражать свойства оригинала.
Уравнения динамики и статики
Динамика рассматривает состояние движения, ход развития процессов во времени. Динамика процессов обычно описывается дифференциальными или разностными уравнениями.
Будем рассматривать систему
Поведение исследуемой системы описывается дифференциальными уравнениями. Так зависимость выходного сигнала  от входного
от входного  в общем случае можно описать следующим дифференциальным уравнением
в общем случае можно описать следующим дифференциальным уравнением

где

- начальные условия. Уравнение 2.1. является уравнением динамики рассматриваемой системы.
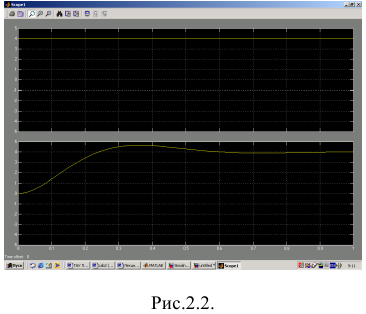
Пусть поведение системы Рис.2.1 описывается уравнением

Будем предполагать, что = 4. Входной сигнал и сигнал на выходе системы , полученный в результате моделирования при нулевых начальных условиях, изображены на Рис.2.2.
В отличии от динамики, рассматривающей процессы протекающие в системе во времени, статика изучает состояние покоя или равновесия. В этом случае отсутствует временной фактор.
Из уравнения динамики (2.1), приравняв нулю все производные (так как режим установившейся), нетрудно получить уравнение статики системы

где  — постоянная входная величина,
— постоянная входная величина,  — установившееся значение выходной величины.
— установившееся значение выходной величины.
Из уравнения статики можно получить статическую характеристику системы, представляющую собой зависимость выходной величины от входной в статическом режиме

Представим статическую характеристику в виде графика Рис.2.3.
Статическая характеристика может быть получена экспериментально путем подачи на вход системы постоянных воздействий и измерения установившихся значений выходных величин.
Линеаризация уравнений
Пусть система
описывается следующим дифференциальным уравнением

где и — соответственно входной и выходной сигналы,  — возмущающее воздействие.
— возмущающее воздействие.
Уравнение (2.3) является нелинейным. Процесс исследования нелинейных систем существенно сложнее процесса исследования линейных. Поэтому исследование нелинейных систем стремятся свести к исследованию линейных. Процедура преобразования нелинейных уравнений в линейные называется линеаризацией.
Процедура линеаризации базируется на разложении нелинейных функций, входящих в уравнения, в ряд Тейлора. Необходимо отметить, что разложение какой либо функции в ряд Тейлора происходит в достаточно малых окрестностях некоторой точки. В качестве такой точки берется точка, соответствующая заданному режиму работы системы. В установившемся состоянии это может быть режим равновесия.
Заметим, что отклонения реальных значений входных и выходных сигналов от их заданных значений в нормально работающей замкнутой автоматической системе не велико.
Система работает по принципу парирования таких отклонений.
Обозначим переменные, соответствующие заданному режиму работы системы

Введем отклонения реальных значений сигналов от требуемых

Тогда

Рассматривая функцию  выражения (2.3) как функцию независимых переменных
выражения (2.3) как функцию независимых переменных  разложим ее в ряд Тейлора в точке (2.4), соответствующей заданному режиму
разложим ее в ряд Тейлора в точке (2.4), соответствующей заданному режиму
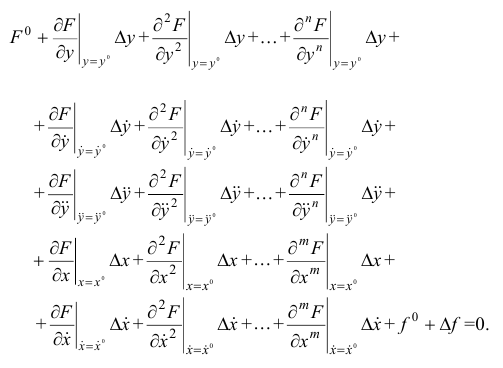
В этом выражении оставим только первые члены разложения, отбросив малые члены более высокого порядка.
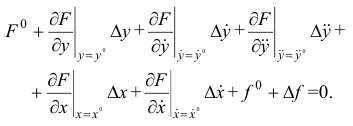
В заданном режиме уравнение (2.3) примет вид
Вычтем это уравнение из (2.5), получим

Введем обозначения

Подставив их в (2.6) и отбросив знак  , получим линеаризованное уравнение в отклонениях
, получим линеаризованное уравнение в отклонениях

Линеаризация уравнения (2.3) была проведена в предположениях:
- отклонения входных
 и
и  сигналов от их заданных значений малы,
сигналов от их заданных значений малы, - функция имеет непрерывные частные производные по всем своим аргументам в окрестности точки разложения, соответствующей заданному режиму,
- линеаризованное уравнение (2.7) является уравнением в отклонениях.
Рассмотрим Рис.2.5.
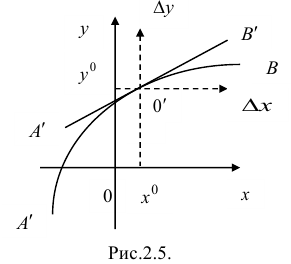
В этом случае нелинейная зависимость между  и
и  , выраженная кривой
, выраженная кривой  , в окрестностях точки разложения
, в окрестностях точки разложения  , заменена касательной
, заменена касательной  . Запись же уравнения в отклонениях, соответствует переносу начала координат в точку .
. Запись же уравнения в отклонениях, соответствует переносу начала координат в точку .
Возможно эта страница вам будет полезна:
| Примеры решения задач по ТАУ |
Преобразование Лапласа и его основные свойства
Преобразованием Лапласа называется следующее соотношение
где  — функция вещественного переменного,
— функция вещественного переменного,  — функция комплексного переменного
— функция комплексного переменного  . Преобразование Лапласа ставит в соответствие функции действительного переменного функцию комплексного переменного . Смысл преобразования Лапласа заключается в том, что оно переводит рассмотрение процесса, являющегося функцией действительного переменного, например времени, на комплексную плоскость с координатами
. Преобразование Лапласа ставит в соответствие функции действительного переменного функцию комплексного переменного . Смысл преобразования Лапласа заключается в том, что оно переводит рассмотрение процесса, являющегося функцией действительного переменного, например времени, на комплексную плоскость с координатами  и
и  .
.
Функцию называют оригиналом, а функцию изображением по Лапласу или просто изображением. Преобразование Лапласа можно записать в символическом виде
где  — оператор Лапласа.
— оператор Лапласа.
Функция , являющаяся оригиналом, должна обладать следующими свойствами:
- должна быть определена и кусочно-дифференцируема на всей положительной числовой полуоси
 ;
;  при
при  ;
;- существуют такие положительные числа
 и
и  , что
, что  при
при  .
.
С помощью обратного преобразования Лапласа
можно найти по известному изображению его оригинал. В нем интеграл берется вдоль любой прямой  . Символически обратное преобразование Лапласа можно записать
. Символически обратное преобразование Лапласа можно записать
где  — обратный оператор Лапласа.
— обратный оператор Лапласа.
Рассмотрим основные свойства преобразования Лапласа.
- Свойство линейности. Для любых постоянных
 и
и 

- Дифференцирование оригинала.
Для первой производной

Для  -й производной
-й производной
Если начальные условия нулевые
Таким образом, -кратное дифференцирование оригинала при нулевых начальных условиях, соответствует умножению изображению на -ю степень  .
.
- Интегрирование оригинала сводится к делению изображения на .
- Теорема запаздывания. Для любого положительного


- Теорема о свертке. Если
 и
и  — оригиналы, a
— оригиналы, a  и
и  -их изображения, то
-их изображения, то

Интеграл правой части называется сверткой функций  и
и  , который обозначают
, который обозначают


- Теорема о предельных значениях. Если — оригинал, а — его изображение, то
и при существовании предела
справедливо записать
Запись дифференциальных уравнений в символическом виде
Будем рассматривать следующую систему
Пусть в общем случае линейная система описывается дифференциальным уравнением -го порядка

где  и
и  соответственно входной и выходной сигналы системы. Преобразуем левую и правую части этого уравнения по Лапласу. В результате получим следующее дифференциальное уравнение в символическом виде
соответственно входной и выходной сигналы системы. Преобразуем левую и правую части этого уравнения по Лапласу. В результате получим следующее дифференциальное уравнение в символическом виде

где  — оператор дифференцирования.
— оператор дифференцирования.
Введем обозначения
Тогда уравнение (2.11) можно записать в более компактно
Стандартная форма записи линейных дифференциальных уравнений
Принято, что линейные дифференциальные уравнения не выше второго порядка записываются в стандартной форме, а именно:
- члены уравнения, содержащие выходную величину и ее производные, записываются в левой части уравнения;
- все остальные члены уравнения, записываются справа;
- коэффициент при выходной величине делают равным единице;
- коэффициенты при входных и выходных величинах и их производных являются либо постоянными времени, либо коэффициентами передачи (усиления).
Рассмотрим дифференциальное уравнение в символическом виде

Разделим обе части этого уравнения на  и введем обозначения
и введем обозначения

Тогда

Здесь  — имеют размерность времени и называются постоянными времени,
— имеют размерность времени и называются постоянными времени,  и
и  — безразмерные коэффициенты передачи (усиления).
— безразмерные коэффициенты передачи (усиления).
Передаточные функции
Передаточной функцией системы называется отношение выходного сигнала к входному, преобразованных по Лапласу при нулевых начальных условиях. Тогда передаточная функция рассматриваемой системы (Рис.2.6) равна
Рассмотрим систему
Пусть ее поведение описывается следующим дифференциальным уравнением в символической записи

иначе

Приведем это уравнение к виду

Введем обозначения
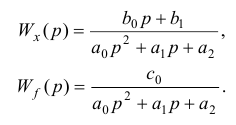
Здесь
передаточная функция по входному сигналу,
передаточная функция по возмущающему воздействию.
Если линейная система имеет несколько входов, то при определении передаточной функции по одному из входов, другие входы полагаются равными нулю.
Динамические характеристики САУ
В теории автоматического управления рассматриваются два типа динамических характеристик:
- временные;
- частотные.
Временные характеристики
Различают два вида временных динамических характеристик: — переходные и импульсные. Переходной функцией  звена или системы называется ее реакция на единичное ступенчатое воздействие
звена или системы называется ее реакция на единичное ступенчатое воздействие  при нулевых начальных условиях. Единичное ступенчатое воздействие представим в следующем виде
при нулевых начальных условиях. Единичное ступенчатое воздействие представим в следующем виде
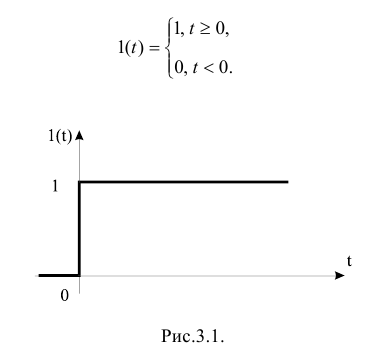
График переходной функция называется ее переходной характеристикой.
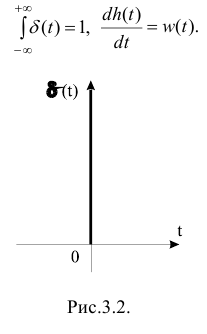
Импульсной переходной или весовой функцией (функцией веса)  звена (системы) называется ее реакция на единичное импульсное воздействие
звена (системы) называется ее реакция на единичное импульсное воздействие  при нулевых начальных условиях. График этой функции — импульсная
при нулевых начальных условиях. График этой функции — импульсная
переходная характеристика представлен на Рис.3.2. Опишем единичное импульсное воздействие
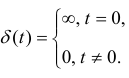
Необходимо отметить, что
Возможно эта страница вам будет полезна:
| Контрольная работа по теории автоматического управления ТАУ |
Частотные характеристики
Частотные характеристики системы могут быть получены при рассмотрении реакции системы на гармонические воздействия разной частоты. При прохождении через линейную систему гармонического сигнала разной частоты у выходного сигнала в общем случае изменяются только амплитуда и фаза, частота остается неизменной. К частотным характеристикам относятся :
- амплитудно — фазовая частотная характеристика (АФЧХ),
- амплитудная частотная характеристика (АЧХ),
- фазовая частотная характеристика (ФЧХ),
- логарифмическая амплитудная частотная характеристика (ЛАЧX),
- логарифмическая фазовая частотная характеристика (ЛФЧХ).
Рассмотрим частотную передаточную функцию , которая получается из передаточной функции (2.12) путем замены  , где
, где  является частотой
является частотой
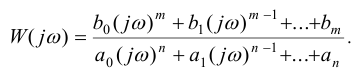
Функцию  можно записать в следующем виде
можно записать в следующем виде

где
На комплексной плоскости представляет собой вектор, при изменении частоты от  до
до  конец вектора описывает кривую, называемую амплитудно — фазовой частотной характеристикой (АФЧХ). Например АФЧХ может иметь следующий вид
конец вектора описывает кривую, называемую амплитудно — фазовой частотной характеристикой (АФЧХ). Например АФЧХ может иметь следующий вид
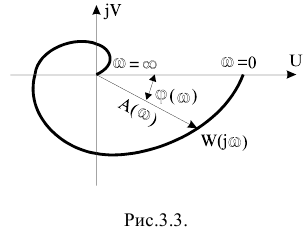
Длина вектора равна  . График
. График  является амплитудной частотной характеристикой (АЧХ)
является амплитудной частотной характеристикой (АЧХ)
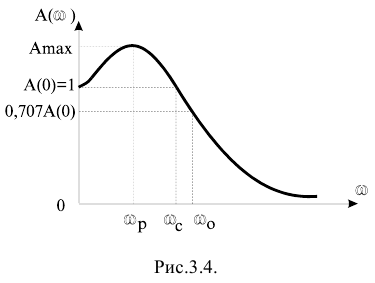
На этой характеристике  — полоса пропускания системы,
— полоса пропускания системы,  — резонансная частота, а
— резонансная частота, а  — частота среза.
— частота среза.
Аргумент  , представляющий собой угол между вектором и действительной положительной полуосью называют фазовой частотной характеристикой (ФЧХ). Кроме того, в соответствии с (3.4) график действительной части
, представляющий собой угол между вектором и действительной положительной полуосью называют фазовой частотной характеристикой (ФЧХ). Кроме того, в соответствии с (3.4) график действительной части  называется вещественной частотной характеристикой, а график мнимой части
называется вещественной частотной характеристикой, а график мнимой части  — мнимой частотной характеристикой.
— мнимой частотной характеристикой.
Наряду с перечисленными частотными характеристиками самое широкое применение находят логарифмические частотные характеристики (ЛЧХ), а именно логарифмические амплитудно-частотные и фазо-частотные характеристики — соответственно ЛAЧX и ЛФЧХ. Для ЛAЧX по оси ординат откладывают  . Единицей измерения
. Единицей измерения  является децибел . Для ЛФЧХ по оси ординат откладывается значение угла в градусах . По оси абсцисс откладывают частоту
является децибел . Для ЛФЧХ по оси ординат откладывается значение угла в градусах . По оси абсцисс откладывают частоту  в логарифмическом масштабе, причем на отметке, соответствующей значению
в логарифмическом масштабе, причем на отметке, соответствующей значению  , записывается само значение частоты .
, записывается само значение частоты .
Ось ординат проходит не через точку = 0, так как в этом случае  , а через произвольную точку обычно малой частоты.
, а через произвольную точку обычно малой частоты.
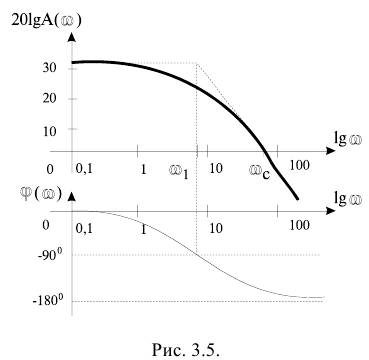
На рисунке 3.5 изображена так называемая реальная ЛАЧХ. На практике обычно ограничиваются построением асимптотических ЛАЧХ, представляющих собой ломаные линии (на рисунке пунктирная линия). Частоты при которых пересекаются асимптоты называются сопрягающими, они связаны с постоянными времени системы соотношением 
Элементарные динамические звенья и их характеристики
Систему автоматического управления можно представить состоящей из ряда элементарных динамических звеньев. Под элементарными динамическими звеньями понимаются устройства, которые могут иметь различный физический вид и конструкцию, однако описываться они должны дифференциальными уравнениями не выше второго порядка. Поэтому и классифицируются элементарные динамические звенья по виду их уравнения.
Представим звено в следующем виде
Здесь  и
и  соответственно входной и выходной сигналы.
соответственно входной и выходной сигналы.
Простейшим из звеньев является безынерционное звено, которое описывается дифференциальным уравнением нулевого порядка — алгебраическим уравнением
где  — безразмерный коэффициент передачи (усиления) звена. Его передаточная функция
— безразмерный коэффициент передачи (усиления) звена. Его передаточная функция

К безынерционным звеньям относятся различные датчики сигналов, электронные усилители, механические редукторы и т. п. Необходимо отметить, что уравнение звена не является реальным, точно отражающим характер процессов, протекающих в той или иной системе. Оно является некоторой идеальной моделью, не учитывающей инерционность датчиков или усилителей, пренебрегающей упругими свойствами и люфтами в редукторах и т.
Временные и частотные характеристики этого звена имеют вид

На Рис.4.2. представлены переходная характеристика безынерционного звена, а на Рис. 4.3 его ЛАЧХ при = 10.
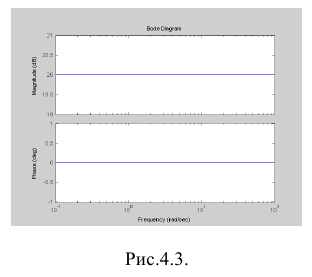
Апериодическое звено (звено первого порядка) имеет следующее дифференциальное уравнение
где  — постоянная времени, — коэффициент передачи (усиления) звена. Постоянная времени имеет размерность секунд. Передаточная функция звена имеет вид
— постоянная времени, — коэффициент передачи (усиления) звена. Постоянная времени имеет размерность секунд. Передаточная функция звена имеет вид
Апериодическим звеном можно описать поведение двигателя внутреннего сгорания или электродвигателя, причем если входной величиной является расход топлива (управляющее напряжение), то выходной величиной будет являться частота вращения вала двигателя. Это же звено является математической моделью электрической печи, электрического генератора постоянного тока и т. п.
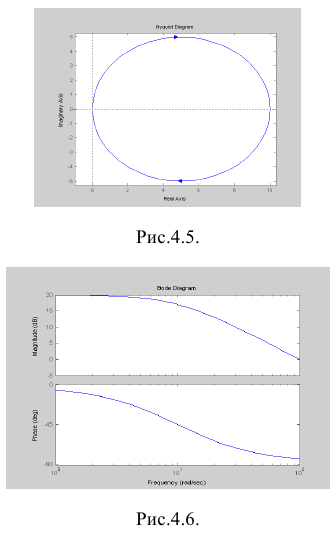
Запишем частотную передаточную функцию звена
и его частотные и переходную характеристики
На Рис.4.4. изображена переходная характеристика апериодического звена при = 10 и = 0,1 сек.
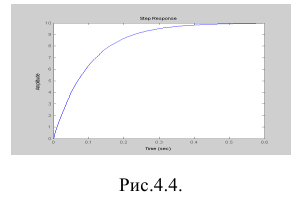
На Рис.4.5 и 4.6 представлены АФЧХ и ЛЧХ этого звена
Дифференциальное уравнение второго порядка в зависимости от величины коэффициентов имеют три звена

где — постоянная времени,  — безразмерный коэффициент демпфирования, — коэффициент передачи (усиления) звена.
— безразмерный коэффициент демпфирования, — коэффициент передачи (усиления) звена.
Если коэффициент демпфирования 0 < < 1, то звено называется колебательным, если = 0 звено называется консервативным, если же  -апериодическое звено второго порядка.
-апериодическое звено второго порядка.
Передаточная функция звена имеет вид
Запишем АФЧХ звена
На Рис.4.7, 4.8 и 4.9 изображены соответственно переходные характеристики, АФЧХ и ЛЧX колебательного звена при

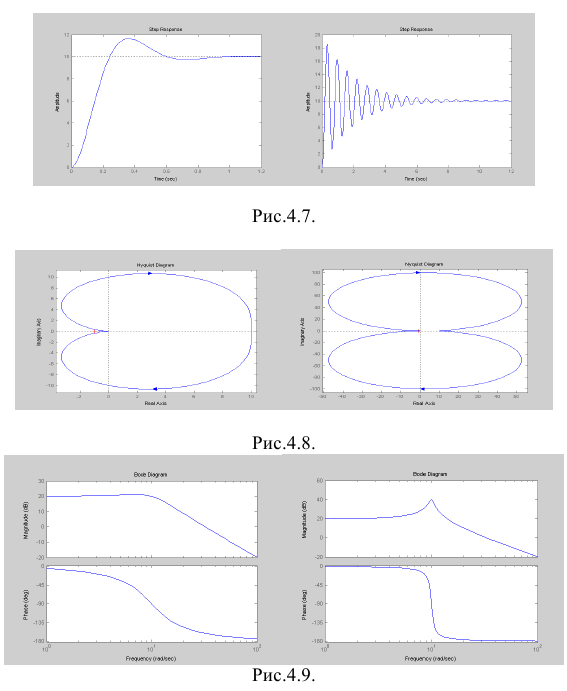
Колебательным звеном описываются двигатели постоянного тока при некоторых значениях параметров, движение летательного аппарата относительно какой либо оси, поведение гироскопической системы и т. п.
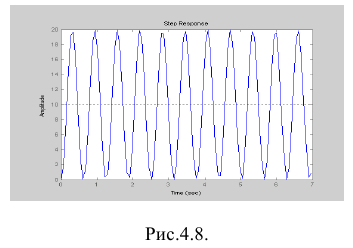
Консервативное звено является частным случаем колебательного и описывает режим возникновения в той или иной системе незатухающих колебаний. На Рис.4.8 изображена переходная характеристика консервативного звена.
Апериодическое звено второго порядка эквивалентно двум последовательно включенным апериодическим звеньям первого порядка.
Интегрирующее звено имеет следующее дифференциальное уравнение
где — коэффициент передачи (усиления) звена. Его передаточная функция
Частотные и переходная характеристики имеют вид
На Рис.4.9. и 4.10 представлены соответственно переходная характеристика и ЛЧX звена

Примером интегрирующего звена является электродвигатель, выходной величиной которого является угол поворота вала, являющейся интегралом от угловой скорости. К интегрирующему звену можно отнести гидравлический демпфер, причем входной является сила, приложенная к поршню, а выходной величиной будет являться перемещение штока.
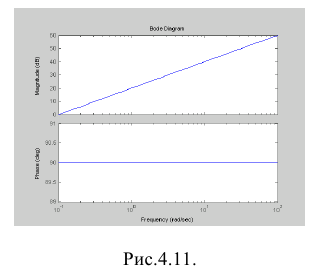
Для дифференцирующего звена справедливо уравнение
Запишем его передаточную и частотную функцию
Частотные и временная характеристика звена имеют вид
На Рис.4.11. представлена ЛЧX звена
В технике не существует реальных объектов, которые бы описывались таким уравнением. Оно соответствует идеальному дифференцирующему звену. В качестве примера такого звена можно назвать тахогенератор, входной величиной которого является угол поворота ротора, а выходной — напряжение на якоре.
Форсирующим звеном называется звено, которое описывается следующим уравнением
Его передаточная функция имеет вид
звена представлены на Рис.4.12.
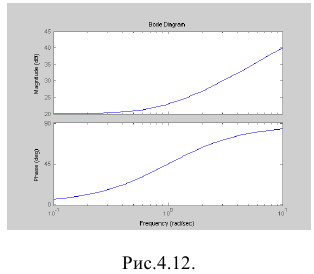
С ростом частоты входного сигнала, у сигнала на его выходе растет амплитуда, причем после точки излома  с интенсивностью 20 дБ/дек. Фаза растет от 0 до 90 градусов.
с интенсивностью 20 дБ/дек. Фаза растет от 0 до 90 градусов.
Форсирующее звено 2-го порядка имеет следующее дифференциальное уравнение

Его передаточная функция

На Рис.4.13 представлены ЛЧХ звена
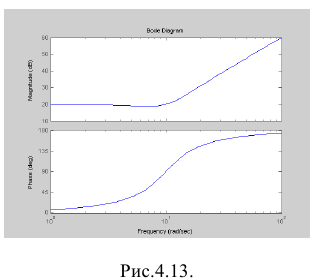
С ростом частоты входного сигнала, у сигнала на его выходе растет амплитуда, причем после точки излома с интенсивностью 40 дБ/дек. Фаза растет от 0 до 180 градусов.
Устойчивость линейных САУ
Исследование линейных систем на устойчивость по расположению корней характеристического уравнения на комплексной плоскости
Пусть система описывается следующим дифференциальным уравнением в операторном виде

Здесь  — оператор дифференцирования,
— оператор дифференцирования,  — входное воздействие,
— входное воздействие,  — выходная величина.
— выходная величина.
Решение уравнения (1) представим в виде

где  — свободная составляющая решения, которая определяется решением однородного дифференциального уравнения (1) без правой части
— свободная составляющая решения, которая определяется решением однородного дифференциального уравнения (1) без правой части

 — вынужденная составляющая решения, определяется как частное решение неоднородного дифференциального уравнения
— вынужденная составляющая решения, определяется как частное решение неоднородного дифференциального уравнения

В соответствии с определением устойчивости по A.M. Ляпунову, система, описываемая уравнением (1) будет асимптотически устойчивой, если при  свободная составляющая
свободная составляющая  определяемая решением дифференциального уравнения (3), будет стремиться к 0.
определяемая решением дифференциального уравнения (3), будет стремиться к 0.
Решение дифференциального уравнения (3) ищут в виде
Продифференцировав это выражение  раз, подставив результаты дифференцирования в (3) и сократив на общий множитель
раз, подставив результаты дифференцирования в (3) и сократив на общий множитель  , получим
, получим

Данное алгебраическое уравнение носит название характеристического уравнения. Формально оно может быть получено из левой части уравнения системы (1) при входном воздействии


Следует заметить, что в этом уравнении  не является символом дифференцирования, так как
не является символом дифференцирования, так как  . Таким образом (7) является характеристическим уравнением исследуемой системы, а его корни определяют характер переходных процессов в системе
. Таким образом (7) является характеристическим уравнением исследуемой системы, а его корни определяют характер переходных процессов в системе
В этом решении  — корни характеристического уравнения.
— корни характеристического уравнения.  — постоянные интегрирования, определяемые из начальных условий.
— постоянные интегрирования, определяемые из начальных условий.
Полагая, что  и используя известную формулу Эйлера
и используя известную формулу Эйлера

решение (8) может быть представлено в следующем виде

где  и
и  — новые постоянные интегрирования. Из этого решения следует, что на устойчивость системы влияет знак вещественной части корней характеристического уравнения
— новые постоянные интегрирования. Из этого решения следует, что на устойчивость системы влияет знак вещественной части корней характеристического уравнения  . Если характеристическое уравнение имеет хотя бы один корень с вещественной частью > 0, то при
. Если характеристическое уравнение имеет хотя бы один корень с вещественной частью > 0, то при  переходной процесс будет расходящимся и только когда у всех корней <0, то при переходный процесс будет затухающим. Наличие мнимой части в корне
переходной процесс будет расходящимся и только когда у всех корней <0, то при переходный процесс будет затухающим. Наличие мнимой части в корне  говорит о присутствии составляющей в решении (10) колебательного характера. Если при этом = 0, то при
говорит о присутствии составляющей в решении (10) колебательного характера. Если при этом = 0, то при  в системе имеют место незатухающие колебания, если >0 или < 0, то в системе будут соответственно расходящиеся и затухающие колебания.
в системе имеют место незатухающие колебания, если >0 или < 0, то в системе будут соответственно расходящиеся и затухающие колебания.
Необходимое и достаточное условие устойчивости формулируется следующим образом: для того чтобы линейная система была асимптотически устойчива, необходимо и достаточно, чтобы все корни ее характеристического уравнения имели отрицательные вещественные части, иначе располагались в левой полуплоскости корней.
Например для системы, имеющей характеристическое уравнение

корни на комплексной плоскости корней располагаются следующим образом
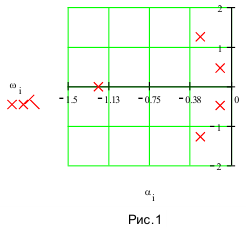
Здесь по оси ординат откладывается вещественная часть корня, а по оси абсцисс его мнимая часть. Как видно из Рис.1, все пять корней полинома расположены в левой полуплоскости, причем

действительный корень, а

и

комплексно-сопряженные корни. Таким образом рассматриваемая система устойчива.
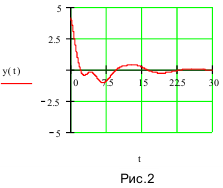
На Рис.2 изображен переходной процесс, полученный в Mathcad 7. Как следует из графика переходной процесс является затухающим.
Обычно корни с отрицательными вещественными частями называют левыми, а корни с положительными вещественными частями — правыми. Если система имеет хотя бы один правый корень, то она неустойчива. Если корень является мнимым, то есть расположен на мнимой оси плоскости корней, то система находится на границе устойчивости.
Исследование линейных систем на устойчивость с помощью алгебраических критериев
Алгебраические критерии устойчивости позволяют судить об устойчивости линейных систем по значениям коэффициентов характеристического уравнения

Нетрудно показать, что необходимым (но не достаточным) условием устойчивости является положительность всех коэффициентов характеристического уравнения

Заметим, что если все коэффициенты характеристического уравнения отрицательны, то умножив их на -1, получим все положительные коэффициенты. Если выполняется условие (2), то исследуемая система может быть устойчивой, а может быть и неустойчивой. Однако если условие (2) не выполняется, то система обязательно будет неустойчивой. Докажем это.
Предположим, что все корни характеристического уравнения вещественные. Тогда уравнение (1) можно представить в следующем виде

где  — корни характеристического уравнения. Будем предполагать, что
— корни характеристического уравнения. Будем предполагать, что  . Если это не так, то умножим (1) на -1.
. Если это не так, то умножим (1) на -1.
Для устойчивой системы все вещественные корни должны быть отрицательными, поэтому

и т.д. Тогда (3) примет вид

Раскрыв в (4) скобки, получим уравнение, аналогичное (1) в котором все коэффициенты положительны.
Теперь предположим, что уравнение (1) будет иметь комплексные корни с отрицательными вещественными частями. В этом случае результат не изменится, так как если

то сомножители в уравнении (3) будут иметь вид

Следовательно и в этом случае все коэффициенты в (1) будут больше 0.
Необходимо отметить, что для систем, имеющих характеристическое уравнение первого и второго порядка, необходимое условие устойчивости является и достаточным.
К алгебраическим критериям устойчивости относятся: — критерий, полученный в 1877 г. английским математиком Э. Раусом; — критерий, разработанный в 1895 г. немецким ученым А. Гурвицем; — критерий, предложенный в 1914 г. П. Льенаром и Р. Шипаром. Наиболее удобным с точки зрения использования ЭВМ является критерий устойчивости Гурвица (для систем, имеющих порядок характеристического уравнения  его модификацию -критерий Льенара-Шипара), который позволяет по определителям, составленным из коэффициентов характеристического уравнения системы судить об ее устойчивости.
его модификацию -критерий Льенара-Шипара), который позволяет по определителям, составленным из коэффициентов характеристического уравнения системы судить об ее устойчивости.
Пусть исследуемая система имеет следующее характеристическое уравнение

Из коэффициентов этого уравнения находят главный определитель Гурвица
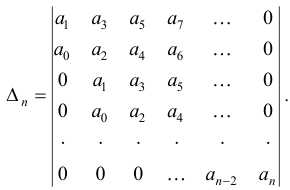
о 0 0 … а„_2 а„ По главной диагонали определителя слева направо записываются коэффициенты характеристического уравнения (5), начиная с  по
по  . В столбцы вверх от главной диагонали записываются коэффициенты в порядке возрастания индексов, а в столбцы вниз — коэффициенты в порядке убывания индексов. Если при этом индекс коэффициента становится больше
. В столбцы вверх от главной диагонали записываются коэффициенты в порядке возрастания индексов, а в столбцы вниз — коэффициенты в порядке убывания индексов. Если при этом индекс коэффициента становится больше  — порядка характеристического уравнения и меньше 0, то данный коэффициент приравнивается 0.
— порядка характеристического уравнения и меньше 0, то данный коэффициент приравнивается 0.
Из главного определителя получают все — 1 определителей Гурвица в следующем виде

Формулировка критерия устойчивости Гурвица такова: для того чтобы система была устойчивой необходимо и достаточно, чтобы при > 0 были больше нуля все определителей Гурвица.
Необходимо отметить, что -й определитель Гурвица может быть выражен через (-1 )-й следующим образом
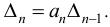
Однако в устойчивой системе  и должно быть выполнено необходимое условие устойчивости, заключающееся в положительности всех коэффициентов характеристического уравнения, в том числе и
и должно быть выполнено необходимое условие устойчивости, заключающееся в положительности всех коэффициентов характеристического уравнения, в том числе и  , а значит и
, а значит и  . Следовательно последний -й определитель в критерии Гурвица можно не находить.
. Следовательно последний -й определитель в критерии Гурвица можно не находить.
Заметим, что когда все коэффициенты характеристического уравнения положительны и положительны все определители Гурвица с нечетными индексами, то оказываются положительными также все определители Гурвица с четными индексами, и наоборот. Откуда следует формулировка критерия Льенара-Шипара: если все коэффициенты характеристического уравнения положительны, то для устойчивости системы необходимо и достаточно, чтобы среди определителей Гурвица были положительны все определители с четными (нечетными) индексами.
Исследование линейных систем на устойчивость с помощью критерия Михайлова
Критерий устойчивости Михайлова относится к частотным критериям в основе которых лежит принцип аргумента, заключающийся в следующем. Известно, что характеристический полином системы

может быть представлен в виде

где 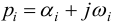 — корни характеристического уравнения
— корни характеристического уравнения

Рассмотрим  -й сомножитель в (2)
-й сомножитель в (2)  и представим его на комплексной плоскости. Корень
и представим его на комплексной плоскости. Корень  может быть изображен в виде вектора, проведенного из начала координат в точку pj9 причем длина вектора равна его модулю, то есть
может быть изображен в виде вектора, проведенного из начала координат в точку pj9 причем длина вектора равна его модулю, то есть  , а угол, образованный с положительным направлением действительной оси — аргументу комплексного числа то есть
, а угол, образованный с положительным направлением действительной оси — аргументу комплексного числа то есть  (Рис.1).
(Рис.1).
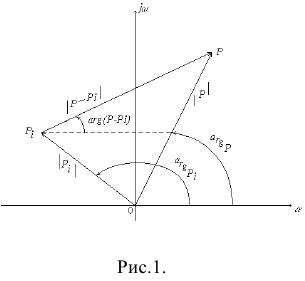
Аналогично на комплексной плоскости может быть изображен и вектор  , проведенный в произвольную точку этой плоскости. Тогда сомножитель
, проведенный в произвольную точку этой плоскости. Тогда сомножитель  представим в виде разности двух рассмотренных векторов. В частном случае при
представим в виде разности двух рассмотренных векторов. В частном случае при  , где
, где  представляет собой частоту колебаний, соответствующих мнимому корню характеристического уравнения, характеристический полином примет вид
представляет собой частоту колебаний, соответствующих мнимому корню характеристического уравнения, характеристический полином примет вид

Тогда концы векторов  будут располагаться на мнимой оси в точке
будут располагаться на мнимой оси в точке  (Рис.2).
(Рис.2).
Необходимо отметить, что в (4)  представляет собой вектор, модуль которого равен
представляет собой вектор, модуль которого равен

и аргумент

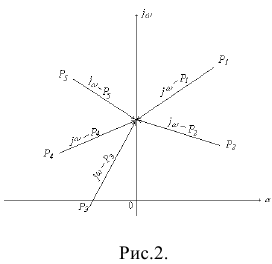
При изменении частоты каждый элементарный вектор  в (4) будет поворачиваться, изменяя и модуль в соответствии с (5) и фазу (аргумент) в соответствии с (6). Считая поворот вектора против часовой стрелки положительным, при изменении от
в (4) будет поворачиваться, изменяя и модуль в соответствии с (5) и фазу (аргумент) в соответствии с (6). Считая поворот вектора против часовой стрелки положительным, при изменении от  до
до  каждый элементарный вектор в (4) повернется на угол
каждый элементарный вектор в (4) повернется на угол  , если его начало координат, то есть корень
, если его начало координат, то есть корень  , расположено слева от мнимой оси, и на угол
, расположено слева от мнимой оси, и на угол  , если корень расположен справа от мнимой оси. Такой поворот элементарных векторов
, если корень расположен справа от мнимой оси. Такой поворот элементарных векторов  изображен на Рис.3.
изображен на Рис.3.
Если характеристический полином имеет  правых и
правых и  левых корней, то при изменении со от до вектор повернется на угол, равный сумме поворотов элементарных векторов
левых корней, то при изменении со от до вектор повернется на угол, равный сумме поворотов элементарных векторов  , то есть изменение аргумента равно
, то есть изменение аргумента равно

Сформулируем принцип аргумента: изменение аргумента при изменении частоты от до равно разности между числом левых и правых корней характеристического уравнения, умноженной на  .
.
При изменении от 0 до изменение аргумента вектора будет вдвое меньше
В 1936 г. на основании принципа аргумента (8) А.В. Михайловым был сформулирован следующий критерий устойчивости: для того чтобы система — го порядка была устойчива, необходимо и достаточно, чтобы вектор , описывающий кривую Михайлова, при изменении частоты от 0 до повернулся вокруг начала координат против часовой стрелки, нигде не обращаясь в 0 на угол  .
.
Заметим, что кривая (годограф) Михайлова для устойчивых систем всегда должна начинаться на вещественной положительной полуоси, поскольку при  из (1) следует, что
из (1) следует, что  на основании необходимого условия устойчивости.
на основании необходимого условия устойчивости.
Для построения кривой Михайлова необходимо представить характеристический полином в виде

где  — вещественная, а
— вещественная, а  — мнимая функции Михайлова и строить кривую Михайлова на комплексной плоскости с осью ординат
— мнимая функции Михайлова и строить кривую Михайлова на комплексной плоскости с осью ординат  и осью абсцисс
и осью абсцисс  .
.
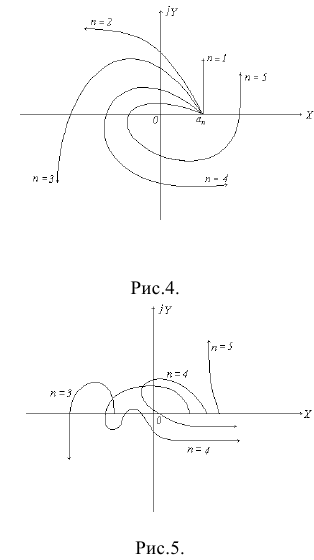
Для устойчивых систем кривая Михайлова имеет плавную спиралевидную форму и уходит в бесконечность в том квадранте координатной плоскости, номер которого равен порядку характеристического уравнения. На Рис.4 изображены кривые Михайлова, соответствующие устойчивым системам, а на Рис.5 — кривые неустойчивых систем.
Исследование устойчивости САУ с помощью критерии Найквиста
Критерий Найквиста относится к частотным критериям устойчивости, был разработан американским ученым Г. Найквистом в 1932 году и позволяет судить об устойчивости замкнутой системы по виду АФЧХ разомкнутой системы. Рассмотрим систему
Здесь  — передаточная функция разомкнутой системы. Тогда передаточная функция замкнутой системы имеет вид
— передаточная функция разомкнутой системы. Тогда передаточная функция замкнутой системы имеет вид
Приравняв знаменатель нулю, получим характеристическое уравнение замкнутой системы
Обозначим
Представим передаточную функцию разомкнутой системы в виде отношения двух полиномов
где  — характеристический полином степени
— характеристический полином степени  разомкнутой системы,
разомкнутой системы,  — полином степени
— полином степени  . Тогда
. Тогда

Заметим, что в этом выражении степени полиномов числителя и знаменателя одинаковы и равны .
Пусть

тогда
Предположим, что разомкнутая система неустойчива и ее характеристическое уравнение имеет  правых и
правых и  левых корней. Будем также предполагать, что замкнутая система неустойчива и имеет
левых корней. Будем также предполагать, что замкнутая система неустойчива и имеет  правых и
правых и  левых корней. Тогда на основании принципа аргумента можно утверждать, что при изменении частоты
левых корней. Тогда на основании принципа аргумента можно утверждать, что при изменении частоты  от 0 до
от 0 до  изменение аргумента
изменение аргумента  составит
составит

Для того, чтобы замкнутая система была устойчивой необходимо и достаточно, чтобы все корни ее характеристического уравнения были левыми, то есть = 0. В этом случае

Так как в соответствии с выражением (3) функции  и отличаются на единицу, то поворот вектора вокруг начала координат соответствует повороту вектора вокруг точки
и отличаются на единицу, то поворот вектора вокруг начала координат соответствует повороту вектора вокруг точки  .
.
Дадим теперь следующую формулировку критерия устойчивости Найквиста. Для того, чтобы замкнутая система была устойчивой при неустойчивой разомкнутой системе необходимо и достаточно, чтобы АФЧХ разомкнутой системы при изменении частоты от 0 до охватывала точку в положительном направлении (против часовой стрелки)  раз, где — число правых корней характеристического уравнения разомкнутой системы.
раз, где — число правых корней характеристического уравнения разомкнутой системы.
На Рис. 4.3 изображена АФЧХ устойчивой системы в замкнутом состоянии, которая в разомкнутом состоянии была неустойчива и имела два правых корня.
На практике обычно дается следующая формулировка критерия Найквиста. Если разомкнутая САУ устойчива, то замкнутая система будет устойчива , если АФЧХ разомкнутой системы не охватывает точку с координатами .
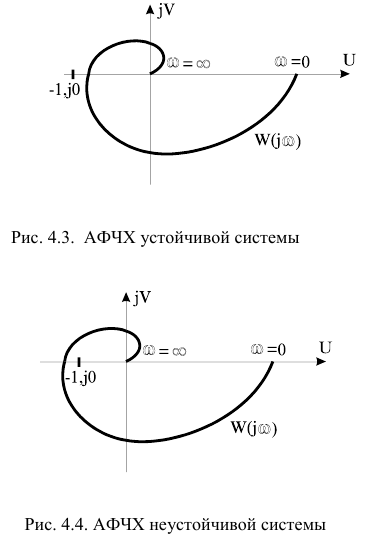
Если проходит через точку , то САУ находится на границе устойчивости.
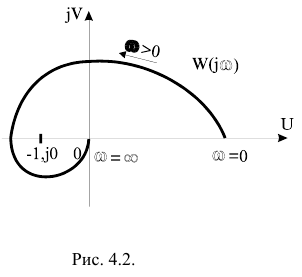
Рассмотренные выше АФЧХ относятся к статическим САУ . У астатических систем, содержащих интегрирующие звенья, АФЧХ при = 0 стремиться к бесконечности и , следовательно , не образует замкнутого контура. Для того, чтобы определить устойчивость астатической замкнутой САУ необходимо построить АФЧХ разомкнутой системы при  , дополнить ее дугой
, дополнить ее дугой  , (где
, (где  — порядок астатизма ) окружности бесконечно большого радиуса
— порядок астатизма ) окружности бесконечно большого радиуса  и затем применять критерий устойчивости Найквиста.
и затем применять критерий устойчивости Найквиста.
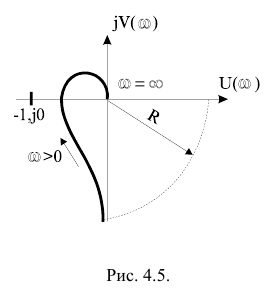
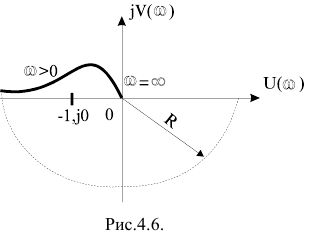
На Рис. 4.5 приведена АФЧХ разомкнутой устойчивой системы с астатизмом первого порядка. Замкнутая система в этом случае также устойчива . На Рис. 4.6 показана АФЧХ разомкнутой неустойчивой системы с астатизмом второго порядка . Для этого случая замкнутая система неустойчива, так как точка с координатами охватывается АФЧХ, дополненной дугой бесконечно большого радиуса в отрицательном направлении.
На практике широкое применение получил критерий устойчивости Найквиста с применением вместо АФЧХ логарифмических амплитудно-частотных характеристик.
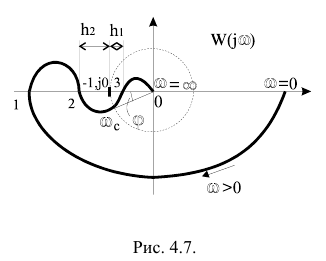
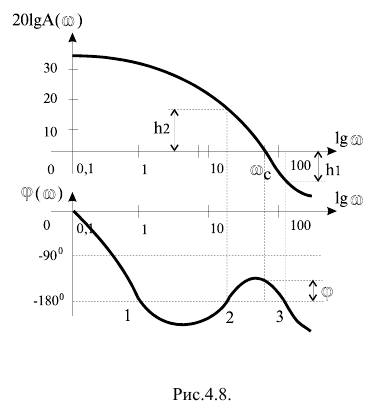
Устойчивость САУ связана с числом пересечений АФЧХ отрезка  отрицательной вещественной полуоси (Рис.4.7). Когда АФЧХ пересекает эту полуось, ЛФЧХ пересекает одну из линий
отрицательной вещественной полуоси (Рис.4.7). Когда АФЧХ пересекает эту полуось, ЛФЧХ пересекает одну из линий  , где
, где  (Рис.4.8).
(Рис.4.8).
точки , то они не влияют на устойчивость САУ, если при этом  и, следовательно,
и, следовательно,

Поэтому область отрицательных ЛAЧX при исследовании устойчивости не рассматривается. Интерес представляет только область положительных ЛAЧX.
Сформулируем критерий Найквиста. Для того, чтобы замкнутая САУ была устойчива, необходимо и достаточно, чтобы разность между числом положительных (на Рис.4.8 сверху вниз) и отрицательных переходов (снизу вверх) ЛЧX прямой  , где
, где  в области
в области  , была равна
, была равна  , где
, где  — число правых корней характеристики уравнения разомкнутой САУ.
— число правых корней характеристики уравнения разомкнутой САУ.
Если разомкнутая система устойчива, то и замкнутая система будет устойчивой (Рис.4.7 и 4.8), так как . Запасы устойчивости по амплитуде равны  и
и  , и по фазе
, и по фазе  .
.
