
Оглавление:


Гироскопический момент
- Как уже известно, когда внешняя сила действует на гироскоп и создает момент против этой фиксированной точки, гироскоп прецессирует с определенной угловой скоростью. Когда момент внешней силы становится равным нулю, прецессия гироскопа заканчивается. Следовательно, для создания гироскопической прецессии в соответствии с теорией приближения требуется момент внешней силы и наоборот. Сделайте прецессию гироскопа с угловой скоростью B2. Рассчитайте момент внешней силы, которая вызывает эту прецессию.
Теорема об изменении количества движения системы Аналогично тому, как для одной материальной точки, выведем теорему об изменении количества движения для системы в различных формах. Людмила Фирмаль
Согласно теореме Резала, момент внешней силы к неподвижной точке гироскопа Lg = dKo d = UB. Вектор Ko, направленный вдоль оси гироскопа, вращается вокруг фиксированной точки с угловой скоростью прецессии ω2, поэтому скорость точки B, совпадающая с конечной точкой вектора Ko, является точкой на объекте при сферическом движении Рассчитывается по формуле, аналогичной векторной формуле Эйлера для скорости , yb = y2 x OV = a2 x Ko, Из OB = K () J2ii x. На момент внешней силы Lff, = = 22xо0 = (22×1). (51) Применение одного из результатов принципа Даламбера к гироскопу означает, что сумма векторного момента внешней силы и момента инерции точки гироскопа равна нулю.
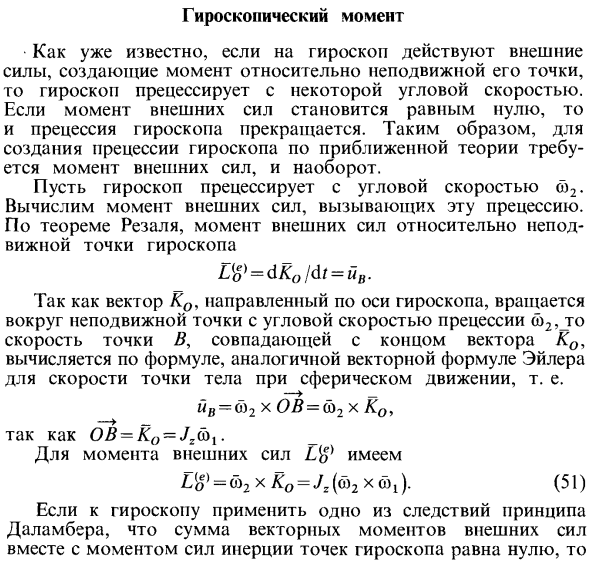
- Рисунок 146 или, наконец, Где L момент всей силы инерции гироскопа относительно неподвижной точки. Этот момент L называется моментом гироскопа. С учетом счета (51) = = = , ( X cb2), = , (a X B2); Z. = JIcoIco2sin0, (52) Где 0 угол нутации, то есть угол между соответствующей осью вращения и осью прецессии. Момент гироскопа может быть выражен как момент пары гироскопов силы, которую гироскоп воздействует на тело, заставляя его прецессировать под действием момента внешней силы. В виде пары силовых гироскопов они передаются на эти тела через подшипники, где расположена ось гироскопа. Если эти тела или одно из них могут двигаться, пара сил гироскопа может вызвать это движение.
Из (52) видно, что момент гироскопа равен нулю, если угловая скорость прецессии o2 равна нулю или если ось гироскопа параллельна оси прецессии. Поведение пары силовых гироскопов полностью определяется гироскопическим моментом этой пары, рассчитанным по уравнению (52). Однако во многих случаях более желательно определять это действие по правилам Жуковского, основанным на той же формуле. Правило Жуковского. Когда к принудительному вращению гироскопа применяется принудительная прецессия, сила гироскопической пары проявляется так, что ось гироскопа параллельна оси прецессии, а направления этих осей совпадают.
Силы, действующие на стержень, в этом случае стремятся отклонить его еще дальше от положения равновесия при любом как угодно малом начальном его отклонении от положения равновесия. Людмила Фирмаль
Позже оба поворота вокруг них будут в одном направлении Если есть объект, который препятствует движению гироскопа, так что гироскоп параллелен оси прецессии, гироскоп выдвигает фиксированную точку между этим телом и гироскопом. Когда гироскоп представляет собой ротор турбины, установленный на корабле и вращающийся вокруг вертикальной оси (рис. 146), давление в гироскопе измеряется подшипником турбины. Сила этого давления N дается формулой M = = JIco1 (o2sin0 Где расстояние между подшипниками турбины. W2 угловая скорость корабля (угловая скорость прецессии); 0 кинематический угол (9 = 90 °, если рассматривается).
Смотрите также:
Задачи по теоретической механике
| Основные допущения приближенной теории | Техническое применение гироскопа |
| Особенности движения оси гироскопа | Прецессия тяжелого гироскопа по приближенной теории |
