
Оглавление:
На этой странице я собрала теорию и задачи с решением по всем темам теоретической механики, надеюсь они вам помогут.
Прежде чем изучать готовые решения задач, нужно знать теорию, поэтому для вас я подготовила очень курс лекций по предмету «теоретическая механика», а после каждой темы размещены задачи с решением.
Страница подготовлена для студентов любых специальностей и охватывает все темы предмета «теоретическая механика».
Более подробно теория рассмотрена на странице:
| Предмет теоретическая механика |
| Если что-то непонятно — вы всегда можете написать мне в WhatsApp и я вам помогу! |
Теоретическая механика
Теоретическая механика (в обиходе — теормех, реже — термех) — наука об общих законах механического движения и взаимодействия материальных тел.
По существу теоретическая механика часть физики, она впитала в себя фундаментальную основу в виде аксиоматики, выделилась как самостоятельная наука и получила широкое развитие благодаря своим обширным и важным прикладным разработкам в области естествознания и техники, одной из основ которых она является.
Многие общие инженерные дисциплины, такие как сопротивление материалов, строительная механика, гидравлика, теория машин и механизмов, части машин и другие основываются на основных законах и принципах теоретической механики. Многие инженерные задачи решаются на основе теорем и принципов теоретической механики, проектируются новые машины, конструкции и сооружения.
Теоретическая механика — это часть механики, в которой изучаются общие законы механического движения или равновесия материальных тел и механического взаимодействия между ними.
Под механическим взаимодействием понимают силовое действие одних тел на другие, а под механическим движением — изменение взаимного расположения материальных тел.
Традиционно теоретическая механика состоит из трех частей: статики, кинематики и динамики.
В статике изучают свойства сил, приложенных к точкам твердого тела, и условия равновесия тел.
В кинематике изучают движение материальных объектов с геометрической точки зрения: выбирают уравнения, описывающие их движение, определяют кинематические параметры движения — траектории, скорости и ускорения.
В динамике изучают движение материальных объектов в зависимости от действующих на них сил.
Основными задачами статики являются:
- изучение методов преобразования сложных систем сил, приложенных к абсолютно твердому телу, в более простой вид, эквивалентный заданным;
- установление условий равновесия тел при действии данной системы
Теоретическая механика – это наука, изучающая основные законы механического движения и взаимодействия материальных тел. Основными объектами в механике выступают материальная точка, система материальных точек и абсолютно твердое тело. Поэтому в основе курса теоретической механики лежит изучение равновесия и движения данных объектов.
Курс теоретической механики делится на три части:
- статика – раздел, изучающий правила эквивалентного преобразования и условия равновесия систем сил ;
- кинематика – это раздел теоретической механики, в котором изучаются геометрические свойства движения точек или тела вне зависимости от их массы и причин, вызывающих это движение;
- динамика – раздел, в котором изучаются движения тел в связи с действующими на них силами.
История предмета теоретическая механика
Статика
Статика — это раздел теоретической механики, в котором изучают условия равновесия системы сил, приложенных к твердому телу, а также приведение сложной системы сил к простейшему виду.
Введение в статику
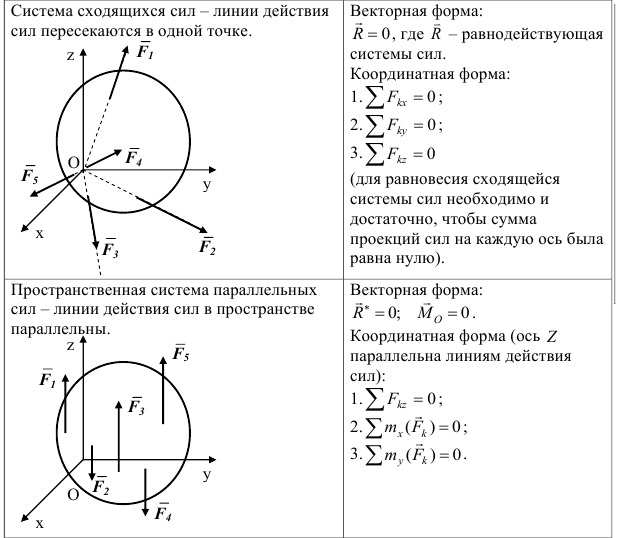
Система сходящихся сил
- Геометрический способ сложения сходящихся сил
- Разложение силы на сходящиеся составляющие + пример решения
- Теорема о равновесии плоской системы трех непараллельных сил
- Проекции вектора на ось и на плоскость + пример решения
- Аналитический способ определения главного вектора
- Условия равновесия системы сходящихся сил
- Замечания к решению задач о равновесии системы сходящихся сил + пример решения
Система двух параллельных сил
- Сложение двух параллельных сил, направленных в одну сторону
- Сложение двух не равных по модулю параллельных сил, направленных в противоположные стороны + пример решения
- Пара сил
Теория пар сил
- Теоремы об эквивалентности пар
- Момент пары как вектор
- Сложение пар. Условие равновесия системы пар + пример решения
Приведение произвольной системы сил к одному центру
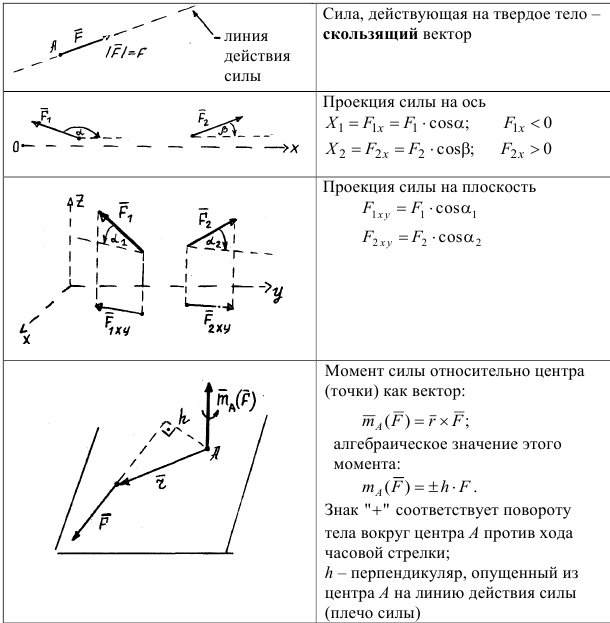
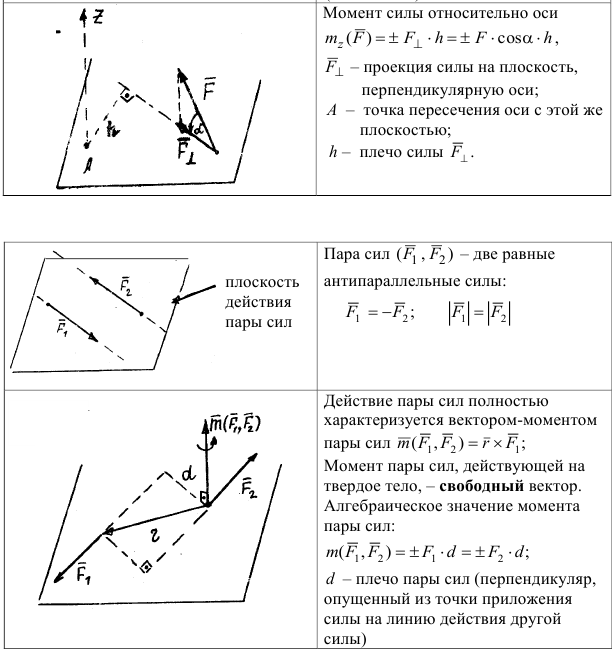
- Момент силы относительно центра (точки)
- Теорема о параллельном переносе силы. Главный вектор и главный момент произвольной системы сил
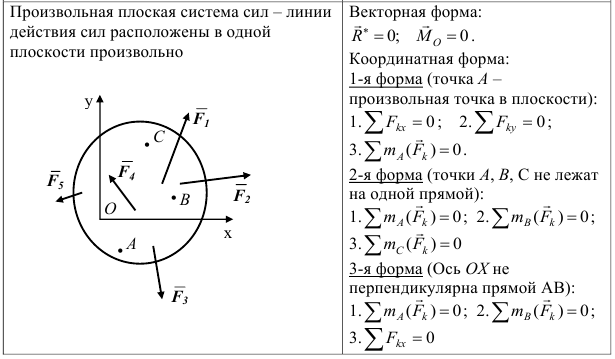
Система сил, произвольно расположенных на плоскости
- Момент пары и момент силы относительно точки как алгебраические величины
- Вычисление главного вектора и главного момента произвольной плоской системы сил
- Случай, когда плоская система сил приводится к одной паре + пример решения
- Случай, когда плоская система сил приводится к равнодействующей + пример с решением
- Случай, когда плоская система сил находится в равновесии
- Замечания к решению задач о равновесии плоской системы сил + пример с решением
- Уравнения равновесия плоской системы параллельных сил + примеры с решением
- Равновесие системы сочлененных тел + примеры с решением
- Статически определенные и статически неопределенные задачи
Равновесие твердого тела при наличии трения скольжения
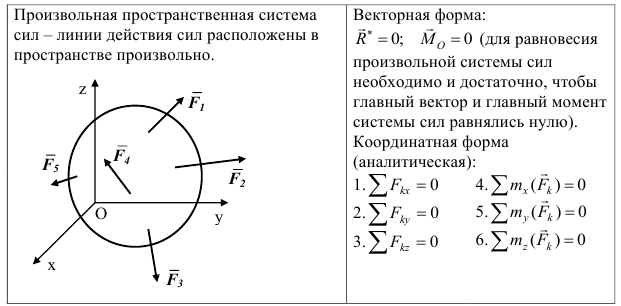
Произвольная пространственная система сил
- Момент силы относительно оси + пример с решением
- Формулы для вычисления моментов силы относительно координатных осей + пример с решением
- Вычисление главного вектора и главного момента произвольной пространственной системы сил
- Частные случаи приведения пространственной системы к простейшему виду
- Аналитические условия равновесия произвольной пространственной системы сил. Случай параллельных сил + пример с решением
Центр параллельных сил и центр тяжести тела
- Центр параллельных сил
- Понятие о центре тяжести тела
- Центр тяжести однородного тела
- Положение центра тяжести некоторых однородных тел простейшей формы
- Определение положения центра тяжести фигур и тел сложной формы + пример с решением
Задачи статики
При изучении аналитической статики прежде всего обращается внимание на общую формулировку принципа возможных перемещений (принцип Бернулли), без уяснения которой вообще невозможно решать задачи по аналитической статике. В основе ее лежит понятие работы силы на элементарном возможном перемещении. Поэтому прежде всего нужно выяснить, что называется возможным перемещением системы и как определяется работа силы на возможном перемещении. Причем, вначале должны быть рассмотрены системы с идеальными связями, для которых сумма работ всех сил реакций связей на любом возможном перемещении системы всегда равна нулю. После этого следует перейти к решению задач с неидеальными связями.
Основой всей аналитической статики является теорема Лагранжа о равновесии системы материальных точек. Формулировка этой теоремы имеет следующий вид: «Для равновесия системы материальных точек, на которую наложены идеальные связи, необходимо и достаточно, чтобы сумма работ всех активных сил, действующих на систему, была равна нулю для всех неосвобождающих возможных перемещений системы и была не больше нуля для освобождающих возможных перемещений системы».
Если связи, наложенные на систему материальных точек, являются неосвобождающими, то метод сводится к уравнениям равновесия, которые называются уравнениями Лагранжа. После того, как эти методы будут изучены, мы перейдем к рассмотрению метода неопределенных множителей Лагранжа.
Следует научиться определять реакции связей при помощи метола возможных перемещений.
Основные положения статики
Основные положения аналитической статики должны быть хорошо изучены по учебнику. Только тогда можно приступать к решению задач. Решение каждой конкретной задачи следует начинать с определения числа степеней свободы системы и выбора параметров, характеризующих положение этой системы, а также с установления зависимости произвольных параметров от независимых. Затем нужно определить все активные силы, действующие на точки системы, и точки приложения этих сил. Сообщив системе возможные перемещения, соответствующие изменениям независимых параметров, и приравняв нулю каждое из выражений работы, получим в результате столько уравнений равновесия, сколько имеется независимых параметров, определяющих положение механической системы. Эти уравнения дают возможность определить все независимые параметры, которые соответствуют положению равновесия системы.
Готовые задачи с решением:
- Задача №28. Полиспаст (механизм для поднятия тяжестей, состоящий из двух систем блоков, каждый из которых смонтирован в общей обойме и насажен на отдельные оси, как указано на рис. 1) оснащен нитью, один из концов которой прикреплен к неподвижной точке полиспаста, а другой свободен и находится под воздействием некоторой активной силы . Нить последовательно обходит как подвижные, так и неподвижные блоки. К нижнему блоку подвешен груз весом . Определить соотношение величин силы и веса при равновесии системы.
- Задача №29. Два однородных стержня и , имеющих соответственно длину и вес каждый, могут вращаться в одной вертикальной плоскости: первый — вокруг своей середины ; второй — вокруг шарнира , расположенного на одной вертикали с на расстоянии от точки (рис. 2). Определить положение равновесия системы.
- Задача №30. Однородный гладкий стержень длины и веса опирается концом на гладкую вертикальную стенку и одной из своих точек лежит на краю неподвижного стола (рис. 3). Определить угол , который образует стержень со столом в поло-женин равновесия, если расстояние от стенки до стола равно .
- Задача №31. В полый цилиндр радиуса , способный катиться без скольжения по горизонтальной плоскости, вложен другой цилиндр радиуса и веса (рис. 4). На малый цилиндр, кроме силы тяжести, действует еще пара сил, расположенная в плоскости чертежа, с моментом . На полый цилиндр намотана нить, которая на своем свободном конце несет груз веса . Полагая поверхности цилиндров достаточно шероховатыми (чтобы не было скольжения), найти положение равновесия системы и определить, при какой зависимости между данными силами это равновесие возможно.
- Задача №32. Палочка длины и веса опирается концом на наклонную плоскость , образующую угол с горизонталью, а в точке лежит на опоре (рис. 5). Определить угол , который палочка образует с горизонталью при равновесии. Размеры и расположение палочки и опоры указаны на чертеже.
- Задача №33. Два однородных цилиндра веса каждый положены на внутреннюю поверхность полого цилиндра, как указано на чертеже (рис. 6). Они поддерживают третий цилиндр веса . Определить зависимость между указанными на чертеже углами и , если — центр большого полого цилиндра, — центр третьего цилиндра и и — соответственно центры первого и второго цилиндров, на которых покоится третий.
- Задача №34. Бифилярный маятник представляет собой систему, состоящую из тяжелого однородного стержня веса , подвешенного на двух параллельных нитях и . Маятник переводится в новое положение и в этом положении удерживается в равновесии горизонтальной парой сил с моментом . Найти угол поворота стержня в положении равновесия системы, если (рис. 7).
Уравнения лагранжа равновесия системы
Уравнения Лагранжа являются уравнениями равновесия системы материальных точек, записанными и независимых координатах. Очень важно выяснить, когда и при каких условиях можно применять эти уравнения, какие преимущества дают эти уравнения при решении задач на равновесие системы. Особенно большое значение здесь имеет определение обобщенных сил.
Для определения положения системы материальных точек, на которую наложены связи, достаточно знать  независимых параметров (здесь
независимых параметров (здесь  — число точек системы, а
— число точек системы, а  — число независимых уравнений связи), полностью определяющих положение системы материальных точек. Эти независимые параметры
— число независимых уравнений связи), полностью определяющих положение системы материальных точек. Эти независимые параметры  носят название лагранжевых или обобщенных координат системы.
носят название лагранжевых или обобщенных координат системы.
При этом декартовы координаты системы должны быть явно представимы через независимые координаты так, что

Всякое изменение декартовых координат должно полностью определяться изменением координат Лагранжа
Тогда условия равновесия системы сведутся к равенствам

которых будет столько, сколько имеется независимых координат, определяющих положение системы.
Готовые задачи с решением:
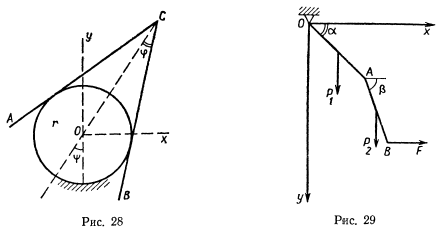
- Задача №35. Два одинаковых стержня и , имеющие каждый длину и вес , связаны между собой шарниром и опираются на неподвижный цилиндр радиуса с горизонтальной осью (рис. 28). Найти угол при равновесии системы и угол , который биссектриса этого угла составляет с вертикалью.
- Задача №36. Однородный стержень весом может вращаться на неподвижном шарнире в вертикальной плоскости. Конец этого стержня соединен шарнирно с другим однородным стержнем весом . К концу второго стержня приложена горизонтальная сила . Найти углы и стержней с горизонтальным направлением при равновесии системы (рис. 29).
- Задача №37. Рассмотрим задачу о равновесии системы, состоящей из шарнирного четырехзвенника , к шарниру которого приложена вертикальная сила , а звено жестко связано с диском, центр которого находится в точке . К диску в точке по касательной приложена горизонтальная сила . Размеры в положении равновесия системы указаны на чертеже. Пренебрегая весом стержней и диска, а также трением в шарнирах, определить соотношение между величинами и в положении равновесия, указанном на чертеже (рис. 30).
- Задача №38. Пусть имеется однородный стержень длины , опирающийся одним из своих концов на криволинейную направляющую, имеющую форму окружности радиуса (см. рис.31). Пусть этот стержень касается некоторой точки окружности, находящейся в конце горизонтального диаметра. Определить, пренебрегая трением, положение равновесия стержня и исследовать его на устойчивость.
Метод неопределенных множителей лагранжа
Метод неопределенных множителей Лагранжа занимает особенное положение в аналитической статике. Кроме того, что он имеет большое теоретическое значение при обосновании ряда основных положений теоретической механики, метод дает возможность решать сложные задачи механики, которые иным способом решаются с большим трудом. Приведенные здесь примеры на применение метода неопределенных множителей призваны подчеркнуть особенности этого метода, хотя иногда они и не представляют самостоятельного интереса.
Метод применяется чаще всего тогда, когда связи, наложенные на систему материальных точек, могут быть заданы аналитическими уравнениями. Тогда основное уравнение равновесия системы материальных точек приводится к виду

причем уравнения связи предполагаются заданными в виде

Приравнивая теперь нулю коэффициенты при  , получим
, получим  уравнений, которые вместе с уравнениями связи определяют положение равновесия системы. Множители
уравнений, которые вместе с уравнениями связи определяют положение равновесия системы. Множители  при освобождающих связях в положении равновесия должны быть отрицательными.
при освобождающих связях в положении равновесия должны быть отрицательными.
Множители при неосвобождающих связях могут быть в положении равновесия как положительными, так и отрицательными.
Готовые задачи с решением:
- Задача №39. Исследовать условия равновесия материальной точки, находящейся под действием силы тяжести, на гладкой горизонтальной плоскости.
- Задача №40. Исследовать условия равновесия тяжелой материальной точки, на которую наложены связи (здесь предполагается, что ось направлена вертикально вверх, а ось — горизонтальна).
- Задача №41. Материальная точка с массой m находится в равновесии внутри трехосного эллипсоида с полуосями и . На точку действуют силы: сила тяжести, параллельная оси , и сила отталкивания от оси , пропорциональная расстоянию точки от этой оси. Найти положение равновесия точки.
Определение реакций связи. применение принципа возможных перемещений к системам с неидеальными связями. силы трения
Принцип возможных перемещений позволяет определять положения равновесия системы с идеальными связями. При помощи этого же принципа можно определять и реакции связей. Для этого
достаточно наложенные на систему связи заменить силами реакции, действие которых эквивалентно действию связен. В результате освобождения системы появляются новые возможные перемещения, которые раньше не допускались связями. На этих перемещениях будет отлична от нуля работа сил реакции связей. Подсчитывая работу всех действующих на систему сил, включая и силы реакции, на этом новом возможном перемещении системы, мы получим уравнение, из которого определяются реакции связей.
Аналогично поступают и при решении задач с неидеальными связями, вводя дополнительные условия на коэффициент трения.
Готовые задачи с решением:
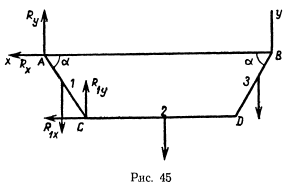
- Задача №42. Два одинаковых стержня и , весом и длины а каждый, могут свободно вращаться на шарнирах и . Они соединены шарнирами и с третьим стержнем, расположенным горизонтально и имеющим вес Q и длину а<>- Вся система находится в равновесии в вертикальной плоскости. Определить реакции шарниров А и С, если угол а известен (рис. 45).
- Задача №43. Однородный стержень весом опирается верхним своим концом на негладкую вертикальную стенку (коэффициент трения равен ), а нижним — на гладкий горизонтальный стол и удерживается в равновесии в вертикальной плоскости при помощи привязанной к его нижнему концу и протянутой по столу веревки, которая затем перекинута через блок и несет на своем свободном конце груз весом . Найти, при каких значениях угла наклона стержня а возможно равновесие системы, а также определить реакции в точках и (рис. 46).
- Задача №43. На негладкой горизонтальной плоскости лежит полушар весом и с радиусом . В точке на него действует горизонтальная сила . Зная значение коэффициента трения между полушаром и опорной плоскостью, определить условия равновесия полушара, если расстояние (рис. 47).
Статика — решение задач с примерами
Статика — это раздел теоретической механики, в котором изучаются методы преобразования систем сил в эквивалентные системы и устанавливаются условия равновесия сил, приложенных к твердому телу.
В статике рассматривается а) теория сил, б) равновесие тел под действием различных систем сил. Все задачи контрольного задания (С1-СЗ) относятся к теме о равновесии. Это позволяет привести общие для всех задач сведения справочного характера из теории и сформулировать алгоритм решения задач.
Виды связей
Связь — тело, препятствующее перемещению данного объекта (тела, узла) в пространстве. Реакция связи — сила, с которой связь действует на объект.
Реакция гладкой поверхности в точке А направлена по нормали к поверхности опоры.
Острие, угол, линия (гладкие).
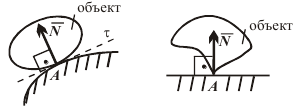
Реакция  направлена по нормали к поверхности объекта.
направлена по нормали к поверхности объекта.
объекта
Реакция гибкой связи направлена вдоль связи от объекта (нить растянута).
Гибкая связь (трос, цепь, нить).

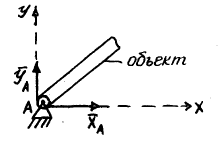
Реакция цилиндрического шарнира в точке А расположена в плоскости, перпендикулярной оси шарнира; направление в плоскости не определено, указываем составляющие реакции шарнира по координатным осям: 
Цилиндрический неподвижный шарнир.
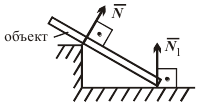
Катки (подвижный шарнир) без трения.
Реакция связи направлена по нормали к поверхности опоры катков.
Невесомый стержень, концы которого закреплены шарнирами.
Реакция связи направлена вдоль прямой, проходящей через концы стержня. Указываем от объекта, предполагая, что стержень растянут; минус в ответе означает, что стержень сжат.
Реакция подшипника В расположена в плоскости, перпендикулярной оси подшипника (ocbz); указываем в плоскости две составляющие этой реакции по коорд. осям:  Направление реакции подпятника А в пространстве не определено; указываем в пространстве три составляющие этой реакции по коорд. осям:
Направление реакции подпятника А в пространстве не определено; указываем в пространстве три составляющие этой реакции по коорд. осям: 
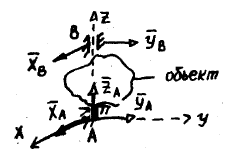
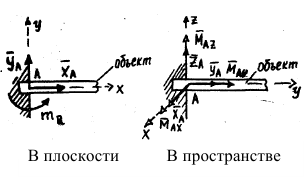
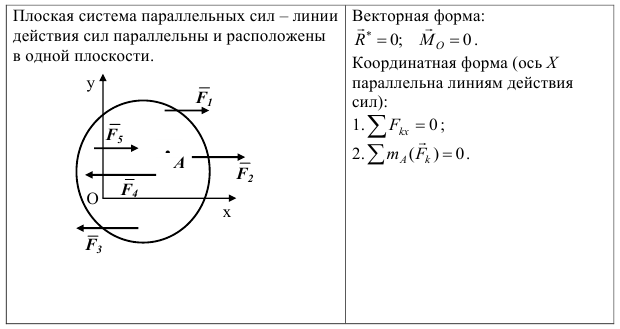
В случае плоской системы сил на объект действует сила, направление которой в плоскости действия сил не определено, и пара сил в этой плоскости.
В случае пространственной системы сил на объект действует сила, направление которой в пространстве не определено, и пара сил, направление вектора момента которой в пространстве не определено (см. рис.).
Основные понятия
Виды систем сил, действующих на твердое тело, и уравнений равновесия
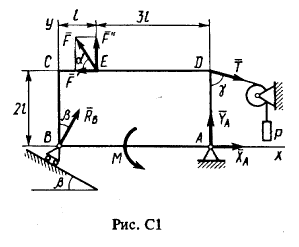
Задача №С1
Жесткая пластина ABCD (рис. С1) имеет в точке А неподвижную шарнирную опору, а в точке В — подвижную шарнирную опору на катках. Все действующие нагрузки и размеры показаны на рисунке.
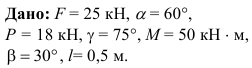
Определить: реакции в точках А и В, вызываемые действующими нагрузками.
Решение:
Рассмотрим равновесие пластины. Проведем координатные оси ху и изобразим действующие на пластину силы (рис. С1):
а) активные силы (нагрузки): силу  и пару сил с моментом М
и пару сил с моментом М
б) реакции связей:
в точке А связью является неподвижная шарнирная опора, се реакцию изображаем двумя составляющими  параллельными координатным осям;
параллельными координатным осям;
в точке В связью является подвижная шарнирная опора на катках, се реакция направлена перпендикулярно плоскости опоры катков;
в точке D связью является трос, реакция троса  направлена вдоль троса от пластины (по модулю
направлена вдоль троса от пластины (по модулю 
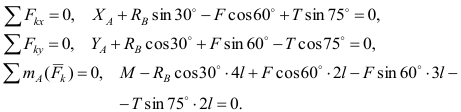
Получилась плоская система сил; составим три уравнения равновесия. При вычислении момента силы относительно точки А разложим силу на составляющие  и воспользуемся теоремой Вариньона в алгебраической форме:
и воспользуемся теоремой Вариньона в алгебраической форме:  Получим
Получим
Решение системы уравнений начинаем с уравнения (3), так как оно содержит одну неизвестную 

Подставляя  уравнение (1)
уравнение (1)

Подставляя уравнение (2)

Проверка. Составим, например, уравнение  (или уравнение моментов относительно любой другой точки (кроме А). Если задача решена
(или уравнение моментов относительно любой другой точки (кроме А). Если задача решена
верно, то эта сумма моментов должна получиться равной нулю.

Ответ:  Знаки указывают, что составляющие реакции шарнира
Знаки указывают, что составляющие реакции шарнира  направлены противоположно показанным на рис. C1.
направлены противоположно показанным на рис. C1.
Задача №С2
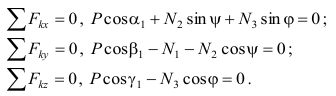
Конструкция состоит из невесомых стержней 1, 2… 6, соединенных друг с другом (в узлах К и М) и с неподвижными опорами А, В, С, D шарнирами (рис. С2). В узлах К и М приложены силы  образующие с координатными осями углы
образующие с координатными осями углы  соответственно (на рисунке показаны только углы
соответственно (на рисунке показаны только углы 

Определить: усилия в стержнях 1-6.
Решение:
Рассмотрим равновесие узла К, в котором сходятся стержни 1, 2, 3. На узел действуют:
а) активная сила 
б) реакции связей (стержней): 
 которые направим по стержням от узла, считая стержни растянутыми. Получилась пространственная система сходящихся сил. Составим се уравнения равновесия:
которые направим по стержням от узла, считая стержни растянутыми. Получилась пространственная система сходящихся сил. Составим се уравнения равновесия:
Решив уравнения (1), (2), (3) при заданных числовых значениях силы Р и углов, получим 
- Рассмотрим равновесие узла М. На узел действуют:
а) активная сила 
б) реакции связей (стержней):  При этом по закону о равенстве действия и противодействия реакция
При этом по закону о равенстве действия и противодействия реакция  направлена противоположно численно же
направлена противоположно численно же  Получилась пространственная система сходящихся сил. Составим се уравнения равновесия:
Получилась пространственная система сходящихся сил. Составим се уравнения равновесия:
При определении проекций силы  на оси Ох и Оy в уравнениях (4) и (5) удобнее сначала найти проекцию этой силы на плоскость хОу (по числовой величине
на оси Ох и Оy в уравнениях (4) и (5) удобнее сначала найти проекцию этой силы на плоскость хОу (по числовой величине 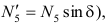 а затем найденную проекцию на плоскость спроектировать на оси Ох, Оу.
а затем найденную проекцию на плоскость спроектировать на оси Ох, Оу.
Решив систему уравнений (4), (5), (6) и учитывая, что  найдем, чему равны
найдем, чему равны  Напоминаем, что в своей задаче решение систем уравнений (1)-(3) и (4)-(6) следует выполнить подробно и с пояснениями.
Напоминаем, что в своей задаче решение систем уравнений (1)-(3) и (4)-(6) следует выполнить подробно и с пояснениями.
После решения сделайте проверку, составив для любого узла уравнение  , где ось
, где ось  направьте, например, по диагонали квадрата, расположенного в плоскости хОу. Эта сумма должна получиться равной нулю.
направьте, например, по диагонали квадрата, расположенного в плоскости хОу. Эта сумма должна получиться равной нулю.
Ответ:  Знаки показывают, что стержни 2 и 6 сжаты, остальные — растянуты.
Знаки показывают, что стержни 2 и 6 сжаты, остальные — растянуты.
Задача №СЗ
Вертикальная прямоугольная плита весом Р (рис. С2) закреплена сферическим шарниром в точке А, цилиндрическим (подшипником) в точке В и невесомым стержнем  лежащим в плоскости, параллельной плоскости yz. На плиту действуют сила
лежащим в плоскости, параллельной плоскости yz. На плиту действуют сила  (в плоскости xz), сила
(в плоскости xz), сила  (параллельная оси у) и пара сил с моментом М (в плоскости плиты).
(параллельная оси у) и пара сил с моментом М (в плоскости плиты).

Определить: реакции опор А, В и стержня
Решение:
Рассмотрим равновесие плиты. На нее действуют:
а) активные силы  и пара сил, момент которой М
и пара сил, момент которой М
б) реакции связей: реакцию сферического шарнира А разложим на три составляющие  цилиндрического шарнира (подшипника) В — на две составляющие
цилиндрического шарнира (подшипника) В — на две составляющие  (в плоскости, перпендикулярной оси подшипника), реакцию
(в плоскости, перпендикулярной оси подшипника), реакцию стержня направим вдоль стержня, предполагая, что он растянут.
стержня направим вдоль стержня, предполагая, что он растянут.
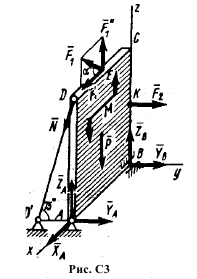
Силы, приложенные к плите, образуют пространственную систему сил. Составляем уравнения ее равновесия:
Для определения момента силы  относительно оси у раскладываем на составляющие
относительно оси у раскладываем на составляющие  параллельные осям
параллельные осям  и применяем теорему Вариньона (относительно оси). Аналогично можно поступить при определении моментов реакции
и применяем теорему Вариньона (относительно оси). Аналогично можно поступить при определении моментов реакции 
Подставив в уравнения (1)-(6) числовые значения заданных величин и решив эти уравнения, найдем величины реакций связей.
В своей задаче систему уравнений (1)-(6) следует решить полностью и с пояснениями. Сделайте проверку, например, составив уравнение моментов относительно оси хи проведенной параллельно оси x
Ответ: 
 Знаки указывают, что силы
Знаки указывают, что силы  направлены противоположно показанным на рис. С2.
направлены противоположно показанным на рис. С2.
Кинематика
Кинематика – часть теоретической механики, в которой изучаются движения материальных тел без учета их масс и действующих на них сил.
Введение в кинематику
Кинематика точки
- Способы задания движения точки + пример с решением
- Скорость точки. Ее определение при задании движения точки векторным способом
- Ускорение точки. Его определение при задании движения точки векторным способом + пример с решением
- Определение скорости и ускорения точки при задании ее движения координатным способом + пример с решением
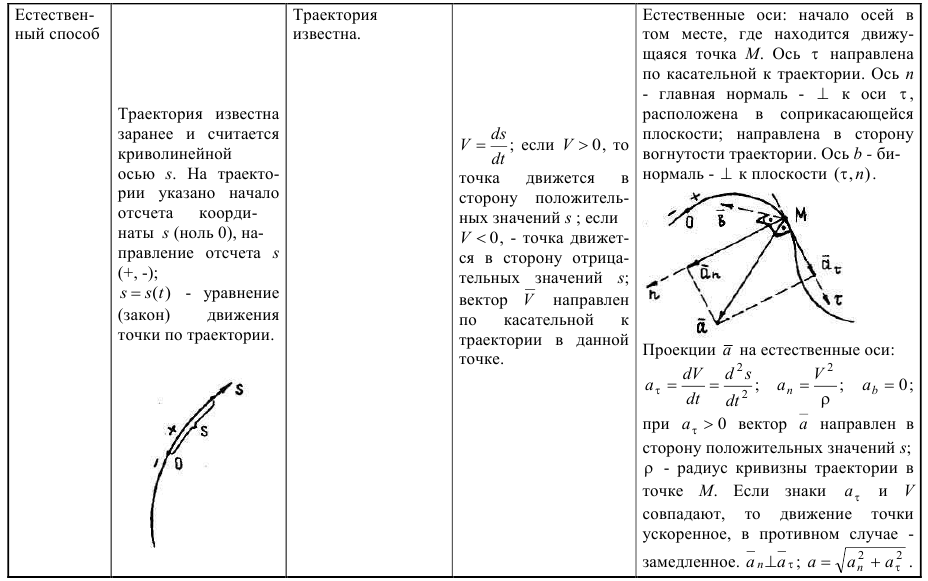
- Определение скорости точки при задании ее движения естественным способом
- Определение ускорения точки при задании ее движения естественным способом + пример с решением
- Частные случаи движения точки
Простейшие виды движения твердого тела
- Поступательное движение
- Вращение твердого тела вокруг неподвижной оси
- Траектории, скорости и ускорения точек вращающегося твердого тела + пример с решением
- Частные случаи вращательного движения твердого тела + пример с решением
- Угловая скорость тела как вектор. Выражение скорости точки тела в виде векторного произведения. Понятие о свободном движении твердого тела
Сложное движение точки
- Абсолютное, относительное и переносное движения точки
- Теорема о сложении скоростей + пример с решением
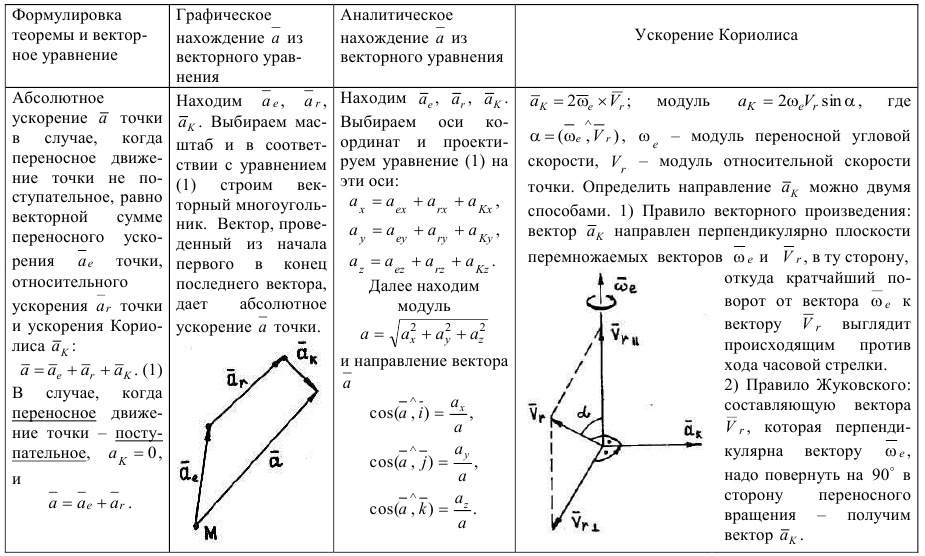
- Теорема Кориолиса о сложении ускорений + пример с решением
- Причины возникновения ускорения Кориолиса и его определение + пример с решением
Плоское движение твердого тела
- Понятие плоского движения тела
- Уравнения движения плоской фигуры + пример с решением
- Разложение движения плоской фигуры на поступательное и вращательное + пример с решением
- Теорема о проекциях скоростей двух точек фигуры + пример с решением
- Мгновенный центр скоростей фигуры
- Распределение скоростей точек плоской фигуры + пример с решением
Задачи кинематики
Основной задачей теоретической механики является описание движений механических систем, происходящих под действием заданных сил. Такое описание может -быть полностью дано только в динамике системы материальных точек. Все остальные разделы теоретической механики либо решают частные, задачи, либо являются подготовкой «к решению основной задачи. Последнее больше всего относится к кинематике. Хотя в кинематике имеются свои самостоятельные интересные задачи, все же основная ее цель—подготовка материала для решения задач динамики. В кинематике изучаются движения системы материальных точек без учета причин, вызывающих эти движения. Все такие движения подчиняются определенным правилам и законам; их можно систематизировать в следующем порядке:
- Скорость и ускорение материальной точки в простейших движениях.
- Сложное движение -материальной точки. Теорема о сложении скоростей для одной -материальной точки.
- Теорема Эйлера о распределении скоростей в твердом теле.
- Теорема Кориолиса об ускорении материальной точки в сложном движении.
- Распределение ускорений в твердом теле.
Первый из перечисленных разделов изучает элементарные свойства движения материальной точки, зависимость между координатами материальной точки, возможные скорости и ускорения материальной точки в простейших движениях. Особое внимание следует обратить на определение проекций ускорения материальной точки на различные системы осей и главное — на естественные оси координат.
Второй раздел изучает сложное движение материальной точки в рассматриваемый момент времени (мгновенное состояние движения ‘материальной точки). Наиболее важным является вопрос об определении переносной и относительной скоростей материальной точки и о выборе подвижной системы отсчета. Теорема о сложении скоростей является одной из важнейших теорем кинематики. Она служит основой и при изучении распределения скоростей в твердом теле.
Теорема Эйлера о распределении скоростей в твердом теле может быть представлена формулой
Наиболее существенными здесь являются представления о сложном движении твердого тела в рассматриваемый момент времени и о мгновенных состояниях движения твердого тела (рассматривается лишь состояние скоростей точек твердого тела в данный момент времени). Как частные случаи рассматриваются плоскопараллельное движение твердого тела и случай движения твердого тела с одной неподвижной точкой.
Теорема Корнолиса об ускорении материальной точки в сложном движении и формула Ривальса о распределении ускорений в твердом теле дают представление об ускорениях точек в сложном движении. Теорема Кориолиса определяет переход от одной системы координат к другой при нахождении ускорения материальной точки (системы движутся относительно друг друга). Наиболее важным является вопрос об определении -переносного ускорения материальной точки при выборе различных систем отсчета. Переносное движение не зависит от характера относительного движения материальной точки.
Формула Ривальса раскрывает характер теоремы Кориолиса, давая полное представление об определении ускорения точки подвижной системы Отсчета.
В дальнейшем при решении задач будем придерживаться представленной здесь последовательности изложения, демонстрируя на простых задачах все преимущества того или иного метода.
Скорость и ускорение материальной точки и простейших движениях
Первыми понятиями, связанными с представлениями о движении материальной точки, с которыми мы встречаемся в кинематике, являются понятия скорости и ускорения материальной точки в пространстве и характер изменения ее параметров. В ряде случаев ‘параметры, определяющие положение материальной точки, находятся в некоторой сложной зависимости, которую необходимо раскрыть для полного определения движения материальной точки.
Рассмотрим несколько задач на раскрытие таких зависимостей, которые могут быть представлены в виде тождественных соотношений между параметрами, определяющими положения различных материальных точек.
Готовые задачи с решением:
- Задача №1. Нить закреплена одним концом в неподвижной точке и продета через кольцо , скользящее с постоянной скоростью по неподвижному стержню . Другой конец нити привязан к ползуну , скользящему по вертикальному стержню (рис. 1). Длина нити равна , расстояние . Определить скорость ползуна в зависимости от расстояния.
- Задача №2. Ползун приводится в движение вдоль стержня при помощи нити, продетой через неподвижное кольцо и наматывающейся на колесо, вращающееся с постоянной угловой скоростью (рис.-2). Определить скорость ползуна как функцию расстояния , если , а радиус колеса равен.
- Задача №3. Ползун приводится о движение посредством нити, наматывающейся на шкив радиуса . Определить скорость ползуна в зависимости от расстояния , если угловая скорость шкива равна (рис. 3).
- Задача №4. Точка описывает плоскую кривую так, что проекция ее скорости на ось сохраняет все время постоянную величину . Зная радиус кривизны траектории и скорость точки в каждый момент времени определить величину и направление ускорения этой точки.
- Задача №5. Точка описывает плоскую траекторию. Зная радиус кривизны этой траектории и скорость изменения угла, образуемого вектором скорости с некоторой неподвижной прямой, определить скорость точки.
- Задача №6. Определить тангенциальную и нормальную составляющие ускорения материальной точки, движение которой задано уравнениями
- Задача №7. Точка движется по винтовой линии с постоянной по величине скоростью . Определить величину и направление ускорения и радиус кривизны траектории точки.
- Задача №8. Точка описывает плоскую кривую. Радиальная составляющая скорости точки положительна и постоянна по величине, а радиальная составляющая ускорения отрицательна и обратно пропорциональна кубу расстояния от некоторого полюса. Определить траекторию и секторную скорость точки.
- Задача №9. Пользуясь формулами для ускорения точки о полярной системе координат, доказать, что если ускорение точки равно нулю, точка будет совершать равномерное и прямолинейное движение.
Сложное движение материальной точки
Теорема о сложении скоростей
Теорема о сложении скоростей является одной из основных теорем кинематики. Она утверждает, что абсолютная скорость материальной точки, участвующей в сложном движении, в каждый момент времени равна геометрической сумме ее переносной и относительной скоростей. Математически эта теорема может быть представлена формулой
где переносной скоростью v€ называется скорость той точки подвижной системы координат, с которой в данный момент совпадает движущаяся материальная точка. Таким образом, переносная скорость зависит не от характера относительного движения материальной точки, а лишь от движения подвижной системы отсчета и от положения материальной точки в данный момент времени. Относительной скоростью vr материальной точки называется ее скорость в движении относительно подвижной системы координат. В общем случае подвижная система координат совершает некоторое сложное движение, а скорости различных точек этой подвижной системы будут различными и по величине, и по направлению. Это обстоятельство необходимо иметь в виду при .определении переносной скорости. Наибольшие затруднения при решении задач этого раздела, ло-вичимому, заключаются в выборе подвижной системы отсчета.
В ряде случаев сложное движение материальной точки определяется одновременно относительно двух подвижных •систем отсчета. При этом полное решение задачи может быть найдено только при учете движеиия обеих подвижных систем отсчета. Рассмотрим несколько задач, поясняющих это утверждение.
Готовые задачи с решением:
- Задача №10. Плоская материальная кривая, уравнение которой, отнесенное к подвижной системе отсчета, имеет вид , движется в своей плоскости поступательно справа налево с постоянной скоростью . Палочка , длина которой равна , шарнирно закреплена одним концом в неподвижной точке и опирается на эту кривую другим (свободным) концом. Определить угловую скорость палочки в зависимости от положения системы (рис. 13).
- Задача №11. Палочка длины а вращается в плоскости чертежа вокруг неподвижной точки с постоянной угловой скоростью (рис. 14). Вокруг подвижного конца этой палочки в той же плоскости вращается другая палочка длины так, что угол , заключенный между палочками, изменяется по закону где постоянна по величине. Определить абсолютную скорость точки , применяя теорему о сложении скоростей.
- Задача №12. Лодку , уносимую течением реки, подтягивают веревкой к точке берега. Найти траекторию лодки, принимая последнюю за точку и считая, что скорость течения реки постоянна по всей ее ширине, скорость наматывания веревки постоянна по величине и равна и скорость лодки относительно реки все время направлена вдоль веревки (рис. 16).
- Задача №13. Рассмотренный выше метод построения абсолютной скорости может быть применен для определения направления касательных к кривым, если иметь в виду, что вектор абсолютной скорости всегда направлен по касательной к траектории точки. Для определения направления абсолютной скорости движения материальной точки представляют как сумму двух более простых движений, направление которых известно. Пусть, например, требуется построить касательную к эллипсу.
Кинематика твердого тела
Распределение скоростей в твердом теле
Мгновенное состояние движения твердого тела определяется распределением скоростей точек твердого тела в данный момент времени. Из теоремы Эйлера известно, что в общем случае мгновенное движение твердого тела всегда можно представить как сложное, состоящее .из двух простейших движений: мгновенно-поступательного и мгновенно-вращательного. Скорости точек твердого тела в общем случае определяются по формуле
где  — скорость мгновенно-поступательного движения;
— скорость мгновенно-поступательного движения;  — мгновенная угловая скорость вращения твердого тела.
— мгновенная угловая скорость вращения твердого тела.
В случае плоскопараллельного движения твердого тела картина распределения скоростей значительно упрощается. В этом случае мгновенное движение твердого тела сводится либо к одному мгновенно-поступательному, либо к одному мгновеновращательному движению. Изучение движения сводится к рассмотрению движения плоской фигуры в своей плоскости, а непрерывное движение может быть «представлено как качение без скольжения подвижной центроиды по неподвижной. Такое ‘представление движения в ряде случаев оказывается весьма удобным, а потому важно научиться определять положения мгновенного центра вращения и центроиды. Мгновенный центр вращения определяется как точка твердого тела, скорость которой равна нулю в рассматриваемый момент времени.
Готовые задачи с решением:
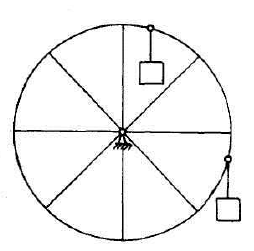
- Задача №14. Определить положения мгновенного центра вращения и центроиды звена шарнирного антипараллелограмма , большое звено которого остается неподвижным во все время движения, если известно, что .
- Задача №15. Жесткий угол (рис. 32) движется в своей плоскости так, что сторона все время проходит через неподвижную точку , а сторона — через неподвижную точку . Найти центроиды этого движения.
- Задача №16. Прямолинейный стержень скользит своими концами по двум взаимно перпендикулярным направляющим и вращающимся вокруг точки с постоянной угловой скоростью . Угол наклона стержня к оси изменяется по закону. Определить абсолютную траекторию произвольной точки стержня.
- Задача №17. Твердое тело совершает сложное движение, которое сводится к трем мгновенным вращениям вокруг трех осей, расположенных по двум сторонам и одной диагонали квадрата (как указано на рис. 55), причем угловые скорости соответственно пропорциональны длинам сторон и диагонали квадрата. Привести эту систему мгновенных вращений к одному мгновенному вращению и найти результирующую угловую скорость вращения.
- Задача №18. По неподвижному круговому конусу с углом при вершине, равным , катится без скольжения другой круговой конус с углом при вершине, равным , так, что ось симметрии последнего вращается вокруг оси симметрии не-подвижного конуса с постоянной угловой скоростью ooj. Определить абсолютную угловую скорость вращения подвижного конуса и найти аксоиды.
- Задача №19. Горизонтальные колеса I и II дифференциального механизма вращаются вокруг одной и той же вертикальной оси соответственно со скоростями и . Определить мгновенную угловую скорость вращения планетного колеса III, ось которого может свободно вращаться вокруг оси (рис. 60).
Теорема Кориолиса об ускорении материальной точки в сложном движении. Распределение ускорений в твердом теле
Зависимость между ускорениями материальной точки, определяемыми в подвижной и неподвижной системах отсчета, определяется теоремой Кориолиса. По этой теореме абсолютное ускорение материальной точки равно геометрической сумме ускорений: переносного, относительного и добавочного (кориолисова ускорения), то есть
Под переносным ускорением  . понимают ускорение той точки (подвижной системы отсчета, с которой в данный момент совпадает изучаемая материальная точка. Относительным ускорением
. понимают ускорение той точки (подвижной системы отсчета, с которой в данный момент совпадает изучаемая материальная точка. Относительным ускорением  называют ускорение, материальной точки в ее движении относительно подвижной системы отсчета. Добавочным ускорением
называют ускорение, материальной точки в ее движении относительно подвижной системы отсчета. Добавочным ускорением  называют ускорение, равное удвоенному векторному произведению мгновенной угловой скорости вращения подвижной системы отсчета на относительную скорость материальной точки, то есть
называют ускорение, равное удвоенному векторному произведению мгновенной угловой скорости вращения подвижной системы отсчета на относительную скорость материальной точки, то есть
Наибольшие затруднения возникают >при определении переносного и добавочного ускорений. Определение переносного ускорения связано с представлением о движении твердого тела, так как всякую точку подвижной системы отсчета всегда можно рассматривать как точку некоторого твердого тела, жестко связанного с этой подвижной системой отсчета. Ускорения же точек твердого тела определяются по формуле Ривальса, на основании которой ускорение произвольной точки твердого тела равно геометрической сумме ускорения некоторого «полюса, за который может быть принята любая точка твердого тела, вращательного и осестремительного ускорений, то есть

Обычно в качестве полюса выбирается та точка твердого тела, ускорение которой может быть определено без излишних затруднений. Вращательное ускорение определяется по формуле
где  — вектор углового ускорения твердого тела, то есть
— вектор углового ускорения твердого тела, то есть

Производная здесь берется_’по отношению к неподвижной системе отсчета, а вектор  определяет положение точки
определяет положение точки  относительно подвижной системы координат, движущейся поступательно вместе с полюсом. Осестремительные ускорение можно определить по формуле
относительно подвижной системы координат, движущейся поступательно вместе с полюсом. Осестремительные ускорение можно определить по формуле

где  — абсолютная угловая скорость вращения твердого тела в рассматриваемый момент времени. Пользуясь тем, что — скользящий вектор, можно показать, что вектор
— абсолютная угловая скорость вращения твердого тела в рассматриваемый момент времени. Пользуясь тем, что — скользящий вектор, можно показать, что вектор  направлен к линии действия вектора , ортогонален к ней, а его величина пропорциональна расстоянию точки от линии действия вектора .
направлен к линии действия вектора , ортогонален к ней, а его величина пропорциональна расстоянию точки от линии действия вектора .
Готовые задачи с решением:
- Задача №20. Пользуясь теоремой Кориолиса, определим ускорение материальной точки в полярной системе координат. Воспользуемся следующей схемой. Пусть движение -материальной точки по палочке «происходит то произвольному закону (рис. 63). Будем предполагать, что палочка вращается
- Задача №21. Палочка длины а скользит своими концами и по неподвижным вертикальной и горизонтальной прямым так, что ее конец движется с постоянной скоростью (рис. 64). По палочке движется материальная точка с постоянной относительной скоростью . Определить абсолютное ускорение материальной точки , принимая в качестве параметра, определяющего положение палочки, угол , который она образует с вертикалью.
- Задача №22. Окружность радиуса (рис. 65) вращается в своей плоскости вокруг своей неподвижной точки с постоянной угловой скоростью против часовой стрелки. Стержень вращается в той же плоскости вокруг точки с постоянной угловой скоростью по часовой стрелке. На стержень и на окружность надето колечко . Определить скорость и ускорение колечка в зависимости от ее-личины угла , который образует радиус окружности со стержнем.
- Задача №23. Палочка скользит своим концом по окружности радиуса и проходит через точку этой окружности. Определить ускорение точки палочки, рас-положенной на расстоянии от конца , если точка движется с постоянной по величине скоростью (рис. 66).
- Задача №24. Окружность радиуса катится без скольжения по неподвижной окружности радиуса так, что скорость ее центра остается постоянной по величине и равна во все время движения. Определить ускорение точки окружности, совпадающей в данный момент с положением мгновенного центра вращения, и ускорение точки , расположенной на противоположном конце диаметра, проходящего через точку .
- Задача №25. Полый цилиндр радиуса вращается вокруг своей неподвижной оси симметрии с постоянной угловой скоростью . По внутренней поверхности этого цилиндра катится без скольжения другой цилиндр радиуса с постоянной относительной угловой скоростью (как показано на рис. 67). Определить ускорение точки малого цилиндра, совпадающей в рассматриваемый момент времени с осью большого.
- Задача №26. Прямой круговой конус II с углом при вершине катится без скольжения по внешней стороне неподвижного конуса I с углом при вершине . При этом ось симметрии подвижного конуса вращается вокруг оси симметрии неподвижного конуса с постоянной скоростью угловой . Определить абсолютное ускорение самой верхней точки М основания подвижного конуса.
- Задача №27. Диск радиуса катается без скольжения по плоскости, описывая окружность радиуса с постоянной по величине угловой скоростью и сохраняя свою плоскость вертикальной. Найти осе стремительное ускорение и вращательное ускорение точки , положение которой на ободе диска определяется углом .
Кинематика — решение задач с примерами
Кинематика — это раздел теоретической механики, в котором изучается движение материальных тел в пространстве с геометрической точки зрения, независимо от действующих на них сил.
Кинематика точки
Кинематика точки (краткие сведения из теории)
Задать движение точки — это значит указать способ, позволяющий определить положение точки в любой момент времени относительно выбранной системы отсчета.
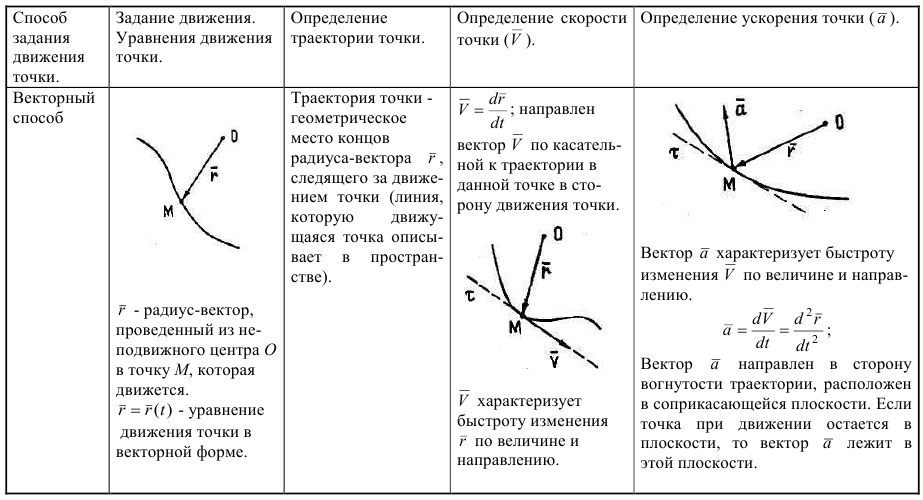
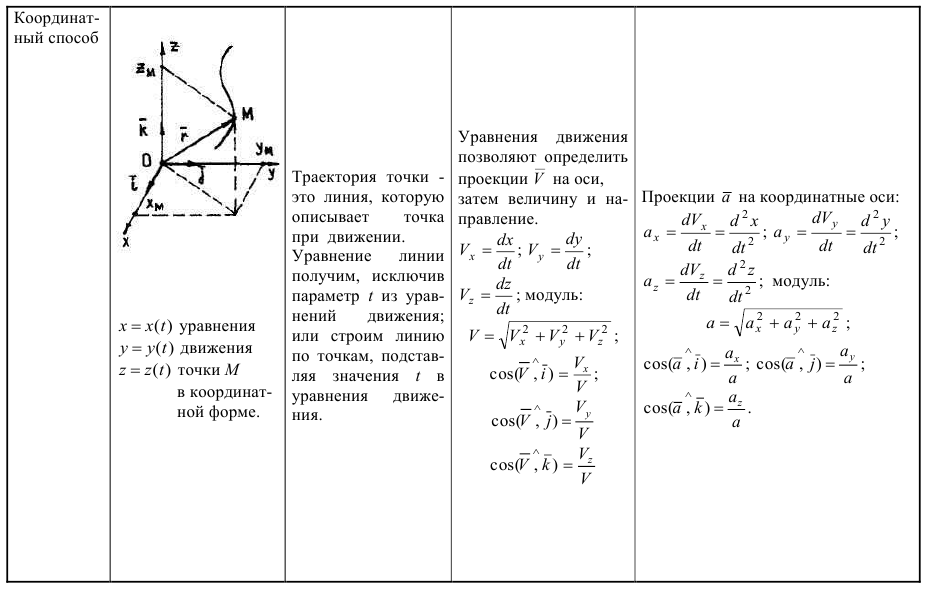
Три основных способа задания движения точки: векторный, координатный, естественный.
Задача №К1а
Уравнения движения точки в плоскости заданы координатным способом и имеют вид:

где время t задано в секундах, координаты х, у — в метрах.
Найти: уравнение траектории точки; положение точки на траектории при  (начальное положение) и при
(начальное положение) и при  скорость
скорость  точки; ускорение
точки; ускорение  точки; касательное
точки; касательное  нормальное
нормальное  ускорения точки и радиус кривизны траектории р при
ускорения точки и радиус кривизны траектории р при  . В каждом пункте выполнить соответствующие построения на рисунке.
. В каждом пункте выполнить соответствующие построения на рисунке.
Решение:
Найдем уравнение траектории, исключив из (1) и (2)
параметр t — время. Способ исключения t зависит от вида функций в правых частях (1), (2). В данном случае найдем из (1), (2) соответственно
Возводя полученные соотношения в квадрат, после этого складывая их и учитывая, что  найдем:
найдем:

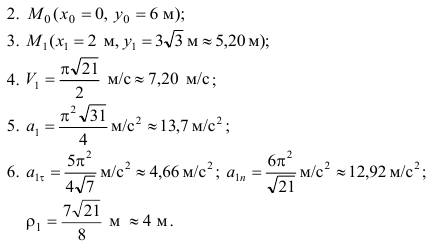
Из этого уравнения следует, что траекторией точки является эллипс, полуоси которого равны 4 м и 6 м, а центр имеет координаты (0, 0).
Выберем масштаб координат и выполним рисунок. Следует заметить, что приведенный рисунок (Рис. К 1а) имеет вид, соответствующий уже окончанию решения; свой рисунок рекомендуется делать по мере продвижения решения. Это позволяет контролировать получаемые результаты и делает их более наглядными.
Находим положение точки при  подставляя это значение t в (1) и (2):
подставляя это значение t в (1) и (2):
Находим положение точки при  подставляя это значение t в (1) и (2):
подставляя это значение t в (1) и (2):

Указываем на рисунке точки  учитывая масштаб координат.
учитывая масштаб координат.
Найдем скорость точки. Из теории следует, что при координатном способе задания движения определяются сначала проекции скорости на оси координат. Используя (1) и (2) — уравнения движения точки — находим
Модуль скорости  Подставляя сюда (3), (4), получим
Подставляя сюда (3), (4), получим


Выберем масштаб для скоростей (рис. К 1а), проведем в точке  линии параллельные осям x и у, на этих линиях в масштабе скоростей отложим отрезки: 5,44 по оси x — 4,71 по оси у, что соответствует величинам и знакам найденных проекций вектора скорости. На этих составляющих строим параллелограмм (прямоугольник), диагональ которого по величине и направлению соответствует вектору
линии параллельные осям x и у, на этих линиях в масштабе скоростей отложим отрезки: 5,44 по оси x — 4,71 по оси у, что соответствует величинам и знакам найденных проекций вектора скорости. На этих составляющих строим параллелограмм (прямоугольник), диагональ которого по величине и направлению соответствует вектору  Проверьте следующее: длина построенного вектора должна получиться равной найденному значению
Проверьте следующее: длина построенного вектора должна получиться равной найденному значению  (с учетом масштаба скоростей). Вектор
(с учетом масштаба скоростей). Вектор  направлен по касательной к траектории в точке и показывает направление движения точки по траектории.
направлен по касательной к траектории в точке и показывает направление движения точки по траектории.
В точке именно сейчас построим естественные оси: касательную  и главную нормаль (эти оси потребуются позже). Касательную проводим вдоль
и главную нормаль (эти оси потребуются позже). Касательную проводим вдоль  главную нормаль проводим перпендикулярно в плоскости рисунка и направляем к центру кривизны траектории в точке (в сторону вогнутости траектории).
главную нормаль проводим перпендикулярно в плоскости рисунка и направляем к центру кривизны траектории в точке (в сторону вогнутости траектории).
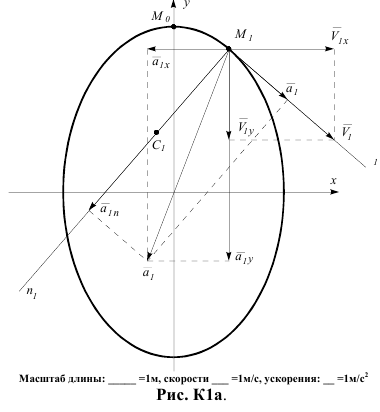
Находим ускорение точки, используя (3), (4):
Модуль ускорения  Из (7), (8) получим
Из (7), (8) получим

Подставляя в (7) — (9)  найдем
найдем
В точке строим в масштабе проекции ускорений  учитывая их величины и знаки, а затем строим вектор ускорения
учитывая их величины и знаки, а затем строим вектор ускорения  Построив следует проверить, получилось ли на рисунке
Построив следует проверить, получилось ли на рисунке  (с учетом масштаба ускорений), и направлен ли вектор в сторону вогнутости траектории (вектор проходит через центр эллипса, но это есть особенность данной задачи, связанная с конкретным видом функций (1) и (2)).
(с учетом масштаба ускорений), и направлен ли вектор в сторону вогнутости траектории (вектор проходит через центр эллипса, но это есть особенность данной задачи, связанная с конкретным видом функций (1) и (2)).
Находим касательное ускорение  характеризующее изменение модуля
характеризующее изменение модуля 
Учитывая (5), получим 
При 
Касательное ускорение можно также найти, дифференцируя по времени равенство  Получим
Получим
 откуда следует
откуда следует
Нормальную составляющую  ускорения, характеризующую изменение направления
ускорения, характеризующую изменение направления  можно найти по формуле
можно найти по формуле

если р — радиус кривизны траектории заранее известен, или (учитывая, что,  и, следовательно,
и, следовательно,  по формуле
по формуле
Так как в данной задаче радиус р заранее неизвестен, то используем (13). Подставляя (10), (11) в (13), получим

Вернемся к рис. К 1а. Ранее на этом рисунке вектор был построен по составляющим  С другой стороны, этот вектор можно разложить на составляющие по естественным осям
С другой стороны, этот вектор можно разложить на составляющие по естественным осям  (пользуясь правилом параллелограмма). Выполним это разложение и построим на рисунке векторы
(пользуясь правилом параллелограмма). Выполним это разложение и построим на рисунке векторы  Далее следует провести проверку: с учетом масштаба ускорений определить по рисунку величины
Далее следует провести проверку: с учетом масштаба ускорений определить по рисунку величины  и убедиться, что они совпадают с (11),(14).
и убедиться, что они совпадают с (11),(14).
Заметим, что движение точки ускоренное, т.к. направления векторов  и совпадают (рис. К 1а).
и совпадают (рис. К 1а).
Найдем радиус кривизны р, используя (12), откуда следует, что  Подставляя в последнее соотношение
Подставляя в последнее соотношение  из (6) и (14), получим радиус кривизны траектории в точке
из (6) и (14), получим радиус кривизны траектории в точке  Отложим на рисунке от точки по оси
Отложим на рисунке от точки по оси  отрезок
отрезок  длины
длины  (в масштабе длин); полученная точка
(в масштабе длин); полученная точка  сеть центр кривизны траектории в точке
сеть центр кривизны траектории в точке
Объединяя полученные результаты, запишем
Ответ:
траектория точки — эллипс, имеющий уравнение 
Обсудим некоторые особенности и частные случаи, которые могут встретиться в задачах.
Если траектория точки — прямая линия, то  и, следовательно,
и, следовательно,  Найденное по величине и направлению ускорение
Найденное по величине и направлению ускорение  равно ускорению
равно ускорению 
Если траектория точки — окружность, то  где R — радиус окружности (определяется из уравнения траектории). Если скорость V точки найдена, то
где R — радиус окружности (определяется из уравнения траектории). Если скорость V точки найдена, то  Вектор
Вектор  направлен к центру окружности.
направлен к центру окружности.
Касательное ускорение  полное ускорение
полное ускорение 
Задача №К1б
Точка движется по дуге окружности радиуса  по закону
по закону  — в метрах, t — в секундах), где
— в метрах, t — в секундах), где  (рис. К16).
(рис. К16).
Определить: скорость и ускорение точки в момент времени  характер движения точки по траектории (ускоренное или замедленное).
характер движения точки по траектории (ускоренное или замедленное).
Решение:
Определяем скорость точки:
При  получим
получим 
Ускорение находим по его касательной и нормальной составляющим:
При  получим, учитывая, что
получим, учитывая, что 

Тогда ускорение точки при  будет
будет

Изобразим на рис. К1б векторы  считая положительным направление от А к М. Так как
считая положительным направление от А к М. Так как 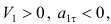 то движение точки замедленное.
то движение точки замедленное.
Ответ: 
 движение точки замедленное.
движение точки замедленное.
Простые движения твердых тел
Простых движений два:
- Поступательное движение тела,
- Вращение тела вокруг неподвижной оси.
Поступательное движение тела
Признак движения: при движении тела любая прямая, жестко связанная с телом, остается параллельной своему начальному положению.
Основная теорема: при поступательном движении тела все точки описывают одинаковые траектории и в один и тот же момент времени имеют одинаковые по величине и направлению скорости, а также одинаковые по величине и
направлению ускорения. Из теоремы следует, что это вид движения, когда скорость  и ускорение
и ускорение  одной точки являются скоростью и ускорением тела в целом (это верно только для поступательного движения).
одной точки являются скоростью и ускорением тела в целом (это верно только для поступательного движения).
Задание движения тела. Из теоремы следует: для того, чтобы задать движение тела, надо задать движение одной его точки, что можно сделать векторным, координатным и естественным способом (см. задачу К1). Заметим, что траектории точек — любые линии (не обязательно прямые).
Кабина «колеса обозрения» и стержень АВ механизма совершают поступательное движение (см. признак), но точки этих тел описывают, соответственно, окружности и циклоиды.
Вращение тела вокруг неподвижной оси (вращательное движение).
Признак движения: при движении тела две точки тела (или жестко с ним связанные) остаются неподвижными.
Через эти точки проходит неподвижная ось вращения.
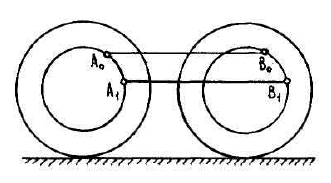
Движение тела в целом характеризуют три параметра: угол поворота тела  , угловая скорость тела
, угловая скорость тела  угловое ускорение тела
угловое ускорение тела 
Определение скорости и ускорения точки вращающегося тела
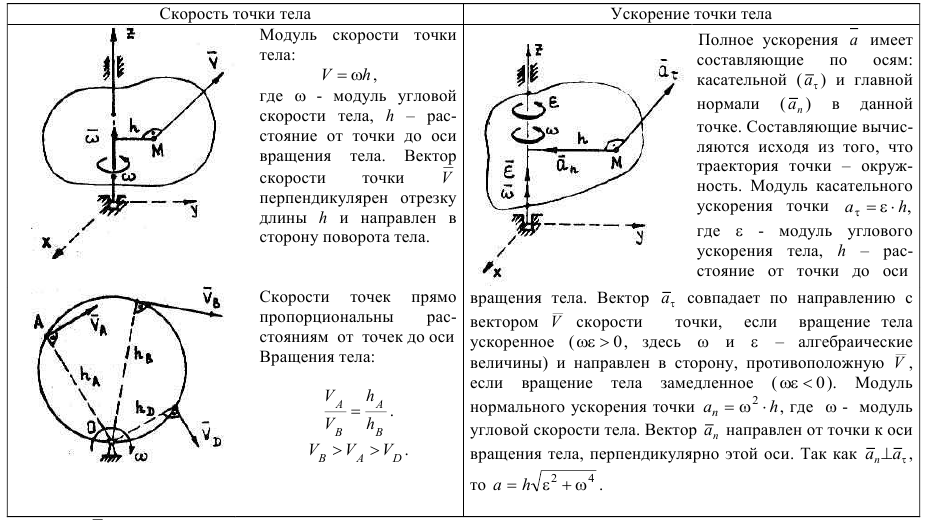
Скорости  точек вращающегося тела в данный момент времени различны по величине и направлению; ускорения a
точек вращающегося тела в данный момент времени различны по величине и направлению; ускорения a
точек тела также различны по величине и направлению.
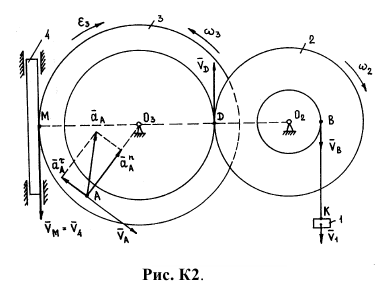
Задача №К2
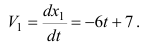
Уравнение движения груза 1 (рис. К2):  он приводит в движение звено 2; движение затем передастся звеньям 3 и 4. Проскальзывание между телами отсутствует. Известно, что
он приводит в движение звено 2; движение затем передастся звеньям 3 и 4. Проскальзывание между телами отсутствует. Известно, что 
 Время t задано в секундах, длины в метрах.
Время t задано в секундах, длины в метрах.
При  определить угловые скорости
определить угловые скорости  тел 2 и 3 соответственно; угловое ускорение
тел 2 и 3 соответственно; угловое ускорение  тела 3, скорость
тела 3, скорость  движения рейки 4, скорость
движения рейки 4, скорость  и ускорения
и ускорения  точки А. Векторы
точки А. Векторы  построить на рисунке.
построить на рисунке.
Решение:
Поступательное движение груза 1 преобразуется во вращательное движение звена 2 (ось вращения  перпендикулярна рисунку), затем во вращательное движение звена 3, которое преобразуется в поступательное движение рейки 4 (рис. К2). Отметим на рис. К2 точки контакта одного тела с другим: точка К (груз — трос), точка В (трос — звено 2), точка D (звено 2 — звено 3), точка М (звено 3 — звено 4).
перпендикулярна рисунку), затем во вращательное движение звена 3, которое преобразуется в поступательное движение рейки 4 (рис. К2). Отметим на рис. К2 точки контакта одного тела с другим: точка К (груз — трос), точка В (трос — звено 2), точка D (звено 2 — звено 3), точка М (звено 3 — звено 4).
Проскальзывание в точках контакта отсутствует, следовательно, скорости соприкасающихся точек равны. Это равенство скоростей является основным при решении данной и следующей задач.
Будем называть ведущим звеном то звено, движение которого задано. С рассмотрения ведущего звена начинаем решение задачи. В данной задаче это груз 1. Ведущим могло бы быть и любое другое звено — в кинематике это существенного значения не имеет.
Но условию, уравнение движения груза 1

Из (1) находим скорость  этого груза
этого груза
При  и вектор
и вектор  направлен по вертикали вниз.
направлен по вертикали вниз.
Рассмотрим точку В. Так как эта точка принадлежит вертикальной части троса ВК, то
с другой стороны, точка В принадлежит вращающемуся телу 2; следовательно,

Для  получено два соотношения
получено два соотношения
Сравнивая эти соотношения, находим

при  для использована формула (2).
для использована формула (2).
Укажем на рис. К2 вектор  он направлен так же, как вектор
он направлен так же, как вектор  в то же время вектор
в то же время вектор  и направлен в сторону поворота тела 2. Тело 2, следовательно, вращается по ходу часовой стрелки. Рассмотрим точку D.
и направлен в сторону поворота тела 2. Тело 2, следовательно, вращается по ходу часовой стрелки. Рассмотрим точку D.
Сравнив эти соотношения, найдем
Подставляя в последнее выражение данные задачи и используя (3), получим

Установим направление поворота тела 3. Скорость точки D перпендикулярна  и направлена в сторону поворота тела 2. Этот вектор
и направлена в сторону поворота тела 2. Этот вектор  и покажет направление поворота тела 3 — против хода часовой стрелки. Изобразим вектор на рис. К2 и заметим, что согласно теории
и покажет направление поворота тела 3 — против хода часовой стрелки. Изобразим вектор на рис. К2 и заметим, что согласно теории 
Рассмотрим точку М.
Сравнив эти соотношения, найдем

Подставляя в последнее уравнение данные из (4), получим

при 
Вектор  направлен перпендикулярно
направлен перпендикулярно  в сторону поворота тела 3, следовательно, вектор
в сторону поворота тела 3, следовательно, вектор  направлен вниз.
направлен вниз.
Рассмотрим точку А. Точка А принадлежит звену 3, которое вращается вокруг оси  следовательно,
следовательно,
для нахождения  надо определить угловую скорость
надо определить угловую скорость  тела и угловое ускорение
тела и угловое ускорение  тела. Зависимость угловой скорости от времени найдена выше (4). Определяем угловое ускорение:
тела. Зависимость угловой скорости от времени найдена выше (4). Определяем угловое ускорение:

В момент времени  Знаки
Знаки  разные, следовательно, вращение тела 3 замедленное.
разные, следовательно, вращение тела 3 замедленное.
Определим расстояние  от точки до оси :
от точки до оси :
после чего находим:
 вектор
вектор  и направлен в сторону поворота тела 3;
и направлен в сторону поворота тела 3;  вектор
вектор  направлен вдоль
направлен вдоль  к центру
к центру
 вектор
вектор  и направлен в сторону, противоположную повороту тела 3 (замедленное вращение тела).
и направлен в сторону, противоположную повороту тела 3 (замедленное вращение тела).
Векторы  а строим на рис. К2 в точке A Можно вычислить
а строим на рис. К2 в точке A Можно вычислить  и построить на рис. К2 вектор
и построить на рис. К2 вектор  Это рекомендуется сделать самостоятельно. Так как
Это рекомендуется сделать самостоятельно. Так как  то
то

Ответ: при 
 — вращение по ходу часовой стрелки;
— вращение по ходу часовой стрелки;
 замедленное вращение против хода часовой стрелки;
замедленное вращение против хода часовой стрелки;
 — движение по вертикали вниз;
— движение по вертикали вниз;
 вектор
вектор  и направлен в сторону поворота тела 3;
и направлен в сторону поворота тела 3;
 вектор
вектор  направлен по
направлен по  к центру
к центру
 вектор
вектор  и направлен в сторону, противоположную вектору
и направлен в сторону, противоположную вектору  так как вращение тела замедленное.
так как вращение тела замедленное.
Рассмотрим теперь ременную передачу движения. Методика решения задачи при этом не меняется, но необходимо отразить дополнительным кинематическим уравнением тот факт, что в передаче движения от тела 1 к телу 2 участвует ремень.
Задача №К2с
Колесо 1 вращается вокруг неподвижной оси  с угловой скоростью
с угловой скоростью

направление поворота указано на рис. 
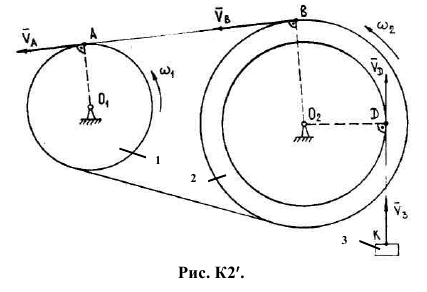
Определить угловую скорость  колеса 2 и скорость
колеса 2 и скорость  груза 3 в произвольный момент времени t. Радиусы колес
груза 3 в произвольный момент времени t. Радиусы колес  известны. Проскальзывание ремня отсутствует.
известны. Проскальзывание ремня отсутствует.
Решение:
Вращательное движение ведущего звена 1 преобразуется во вращательное движение звена 2, а затем в поступательное движение груза 3. Точки контакта (рис. ): А (звено 1 — ремень), В (ремень — звено 2), D (звено 2 -трос DK), К (трос — звено 3).
Рассмотрим точки А и В.
Сравнив эти соотношения, найдем:

Направление поворота тела 2 покажет вектор  который совпадает с вектором
который совпадает с вектором  Тело 2 вращается против хода часовой стрелки. Рассмотрим точки D и К.
Тело 2 вращается против хода часовой стрелки. Рассмотрим точки D и К.
Сравнив эти соотношения, найдем

Подставляя в последнее выражение значение  (формула (7)), получим
(формула (7)), получим
Вектор  совпадает по направлению с вектором
совпадает по направлению с вектором  Последний перпендикулярен
Последний перпендикулярен  и направлен в сторону поворота тела 2. Следовательно, груз 3 поднимается.
и направлен в сторону поворота тела 2. Следовательно, груз 3 поднимается.
Ответ: 
Задача решена в общем виде, но даже в этом случае при построении векторов на рисунке следует соблюдать соотношения «больше-меньше-равно». Например, на рис. 
Число вопросов в задаче может быть больше, по если освоена методика решения, то это не вызовет затруднений. Найдите самостоятельно, например, 
Примечание: теория вращательного движения твердого тела будет применена также в задачах КЗ и К4 (см. ниже).
Составное (сложное) движение точки
Движение точки называется составным, если точка участвует в двух или более движениях относительно выбранной системы отсчета. Чаще всего составным является движение точки относительно неподвижной (условно) системы отсчета. Это движение точки называется абсолютным движением, и скорость (ускорение) точки в неподвижной системе отсчета называется абсолютной скоростью V (ускорением ) точки.
Дополнительно выбирается подвижная система отсчета (в каждой задаче есть конкретное движущееся тело, с которым ее связывают). Движение подвижной системы отсчета относительно неподвижной системы называется переносным движением точки. Абсолютная скорость (ускорение) той точки подвижного тела (с ним связана подвижная система отсчета), с которой в данный момент совпадает движущаяся по телу точка (мысленно остановили точку на теле), называется переносной скоростью  (ускорением
(ускорением  точки.
точки.
Скорость (ускорение) точки в движении относительно подвижной системы отсчета называется относительной скоростью  (ускорением
(ускорением  точки (мысленно останавливаем движение тела).
точки (мысленно останавливаем движение тела).
Возможно эта страница вам будет полезна:
| Помощь по теоретической механике |
Задача №К5
Капля воды стекает по лопатке рабочего колеса вращающейся турбины. Неподвижную систему отсчета свяжем со стенами машинного зала. Подвижную — с лопаткой турбины. Движение турбины (вращательное) — переносное движение капли. Движение капли по лопатке — относительное движение капли. Движение капли относительно стен — абсолютное, оно и является составным.
При вычислениях, связанных с относительным движением точки, применяется теория кинематики точки (см. задачу К1). Вычисления, связанные с переносным движением, зависят от вида движения тела, с которым перемещается подвижная система отсчета. Если движение тела поступательное или вращательное, то применяется рассмотренная выше теория (см. задачу К2). Если тело совершает составное движение, то используется теория, относящаяся к соответствующему движению тела. После выполнения упомянутых вычислений, применяется теория сложения скоростей и ускорений точки при ее сложном движении.
Теорема сложения скоростей при составном движении точки
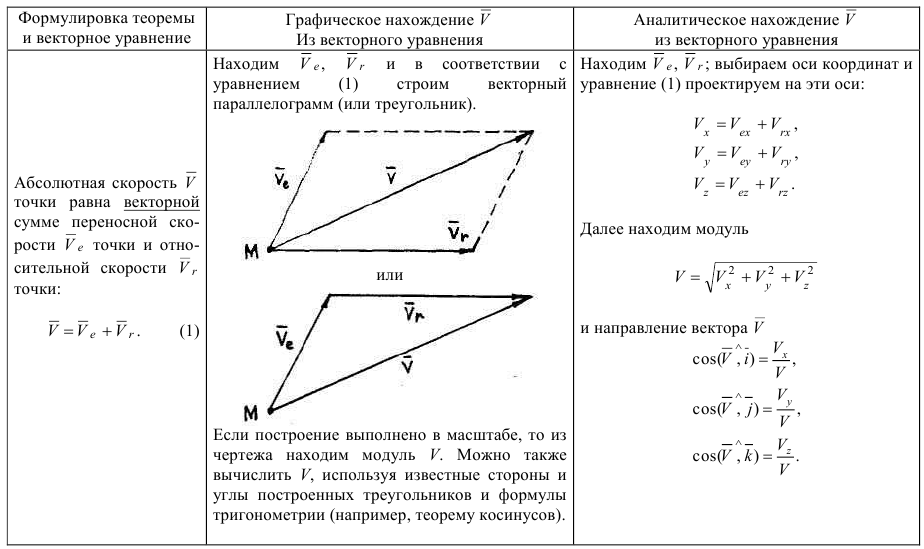
Теорема сложения ускорений при составном движении точки (теорема Кориолиса)
Рассмотрим две здачи (в задаче КЗа ось переносного вращения перпендикулярна пластине, в задаче КЗб — лежит в ее плоскости).
Задача №КЗа
Пластина  рис. КЗа) вращается вокруг оси, проходящей через точку О перпендикулярно плоскости пластины, по закону
рис. КЗа) вращается вокруг оси, проходящей через точку О перпендикулярно плоскости пластины, по закону  (положительное направление отсчета угла
(положительное направление отсчета угла  показано на рис. КЗа дуговой стрелкой). Но дуге окружности радиуса R движется точка В по закону
показано на рис. КЗа дуговой стрелкой). Но дуге окружности радиуса R движется точка В по закону  (положительное направление отсчета координаты s на траектории — от А к В).
(положительное направление отсчета координаты s на траектории — от А к В).
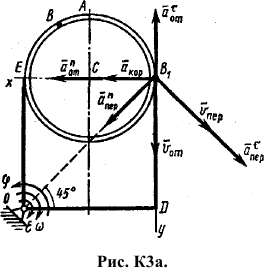
Определить: абсолютную скорость  и абсолютное ускорение
и абсолютное ускорение  в момент времени
в момент времени 
Решение:
Рассмотрим абсолютное движение точки В как сложное, считая се движение по дуге окружности относительным, а вращение пластины переносным движением (подвижные оси  связаны с пластиной). Тогда абсолютная скорость
связаны с пластиной). Тогда абсолютная скорость  и абсолютное ускорение
и абсолютное ускорение  точки найдутся по формулам:
точки найдутся по формулам:

где учтено, что

Определим все, входящие в равенства (1) величины.
Относительное движение (мысленно остановим пластину). Это движение задано естественным способом (см. задачу К16). Закон движения точки по траектории:

Сначала установим, где будет находиться точка В на дуге окружности в момент времени  Полагая в уравнении (2)
Полагая в уравнении (2)  получим
получим

Тогда 
Знак минус свидетельствует о том, что точка В в момент  находится справа от точки А. Изображаем ее на рис. КЗа в этом положении (точка
находится справа от точки А. Изображаем ее на рис. КЗа в этом положении (точка 
Теперь находим числовые значения 
где  — радиус кривизны относительной траектории, равный радиусу окружности R. Для момента времени
— радиус кривизны относительной траектории, равный радиусу окружности R. Для момента времени  учитывая, что
учитывая, что  получим
получим
Знаки показывают, что вектор  направлен в сторону положительного отсчета координаты
направлен в сторону положительного отсчета координаты  вектор
вектор  в противоположную сторону; вектор
в противоположную сторону; вектор  направлен к центру С окружности. Изображаем все эти векторы на рис. КЗа.
направлен к центру С окружности. Изображаем все эти векторы на рис. КЗа.
Переносное движение (мысленно остановим точку на пластине). Это движение (вращение) происходит по закону  (см. задачу К2). Найдем угловую скорость
(см. задачу К2). Найдем угловую скорость  и угловое ускорение с переносного вращения:
и угловое ускорение с переносного вращения:

и при 

Знаки указывают, что в момент  с направления
с направления  противоположны направлению положительного отсчета угла
противоположны направлению положительного отсчета угла  отмстим это на рис. КЗа соответствующими стрелками.
отмстим это на рис. КЗа соответствующими стрелками.
Для определения  найдем сначала расстояние
найдем сначала расстояние  точки
точки 
от оси вращения О. Из рисунка видно, что  Тогда в момент времени
Тогда в момент времени  учитывая равенства (4), получим
учитывая равенства (4), получим

Изображаем на рис. КЗа векторы  учетом направления
учетом направления  и вектор
и вектор  (направлен к оси вращения).
(направлен к оси вращения).
Ускорение Кориолиса. Модуль ускорения Кориолиса определяем по формуле  где а — угол между вектором
где а — угол между вектором  и осью вращения (вектором
и осью вращения (вектором  В нашем случае этот угол равен 90°, так как ось
В нашем случае этот угол равен 90°, так как ось
вращения перпендикулярна плоскости пластины, в которой расположен вектор В момент времени  учитывая, что в этот момент
учитывая, что в этот момент  и
и  получим
получим
Направление  найдем по правилу Н.Е.Жуковского: так как вектор
найдем по правилу Н.Е.Жуковского: так как вектор
лежит в плоскости, перпендикулярной оси вращения, то повернем его на 90° в направлении  т.е. по ходу часовой стрелки. Изображаем
т.е. по ходу часовой стрелки. Изображаем  на рис. КЗа. (Иначе направление
на рис. КЗа. (Иначе направление  можно найти, учитывая, что
можно найти, учитывая, что  Изображаем вектор на рис. КЗа.
Изображаем вектор на рис. КЗа.
Таким образом, значения всех входящих в правые части равенств (1) векторов найдены и для определения  остается только сложить эти векторы. Произведем это сложение аналитически.
остается только сложить эти векторы. Произведем это сложение аналитически.
Определение  Проведем координатные оси
Проведем координатные оси  (см. рис. КЗа) и спроектируем почленно обе части равенства
(см. рис. КЗа) и спроектируем почленно обе части равенства  на эти оси. Получим для момента времени
на эти оси. Получим для момента времени 

После этого находим

Учитывая, что в данном случае угол между  равен 45°, значение
равен 45°, значение  можно еще определить по формуле
можно еще определить по формуле

Определение  По теореме о сложении ускорений
По теореме о сложении ускорений

Для определения  спроектируем обе части равенства (7) на проведенные оси
спроектируем обе части равенства (7) на проведенные оси  Получим
Получим
Подставив сюда значения, которые все величины имеют в момент времени  найдем, что в этот момент
найдем, что в этот момент 
Тогда

Ответ: 
Рис. КЗб.
Задача №КЗб
Треугольная пластина ADE вращается вокруг оси z, совпадающей со стороной АЕ, по закону  (положительное направление отсчета угла
(положительное направление отсчета угла  показано на рис. КЗб дуговой стрелкой). По гипотенузе AD движется точка В по закону
показано на рис. КЗб дуговой стрелкой). По гипотенузе AD движется точка В по закону  положительное направление отсчета
положительное направление отсчета 
Дано: 
 — в радианах, s -в сантиметрах, t — в секундах). Определить: абсолютную скорость и абсолютное ускорение в момент времени
— в радианах, s -в сантиметрах, t — в секундах). Определить: абсолютную скорость и абсолютное ускорение в момент времени 
Решение:
Рассмотрим абсолютное движение точки В как сложное, считая се движение по прямой AD относительным, а вращение пластины — переносным (подвижные оси  связаны с пластиной). Тогда абсолютная скорость
связаны с пластиной). Тогда абсолютная скорость  и абсолютное ускорение
и абсолютное ускорение  найдутся по формулам:
найдутся по формулам:

где учтено, что 
Определим всс входящие в равенство (1) величины.
Относительное движение (мысленно остановим пластину). Это движение задано естественным способом (см. задачу К16). Закон движения точки по прямолинейной траектории:

поэтому  так как для прямой линии
так как для прямой линии 
В момент времени  имеем
имеем

Знаки показывают, что вектор  направлен в сторону положительного отсчета координаты s, а вектор
направлен в сторону положительного отсчета координаты s, а вектор  — в противоположную сторону. Изображаем эти векторы на рис. КЗб.
— в противоположную сторону. Изображаем эти векторы на рис. КЗб.
Переносное движение (мысленно остановим движение точки по пластине). Это движение (вращение) происходит по закону 
Найдем угловую скорость  и угловое ускорение
и угловое ускорение  переносного вращения (см. задачу К2):
переносного вращения (см. задачу К2): 

Знаки указывают, что в момент  направление совпадает с направлением положительного отсчета угла , а направление ему противоположно; отмстим это на рис. КЗб соответствующими дуговыми стрелками.
направление совпадает с направлением положительного отсчета угла , а направление ему противоположно; отмстим это на рис. КЗб соответствующими дуговыми стрелками.
Из рисунка находим расстояние  от точки
от точки  до оси вращения z:
до оси вращения z:  Тогда в момент
Тогда в момент  учитывая равенства (4), получим
учитывая равенства (4), получим

Изобразим на рис. КЗб векторы  (с учетом знаков
(с учетом знаков  направлены векторы
направлены векторы  перпендикулярно плоскости ADE, а вектор
перпендикулярно плоскости ADE, а вектор  по линии
по линии  к оси вращения.
к оси вращения.
Ускорение Кориолиса. Так как угол между вектором  и осью вращения (вектором
и осью вращения (вектором  равен 30°, то в момент времени
равен 30°, то в момент времени 

Направление  найдем по правилу Н.Е. Жуковского. Для этого вектор спроектируем на плоскость, перпендикулярную оси вращения (проекция
найдем по правилу Н.Е. Жуковского. Для этого вектор спроектируем на плоскость, перпендикулярную оси вращения (проекция
направлена противоположно вектору  и затем эту проекцию повернем на 90° в сторону со , т. с. по ходу часовой стрелки; получим направление вектора Он направлен перпендикулярно плоскости пластины так же, как вектор
и затем эту проекцию повернем на 90° в сторону со , т. с. по ходу часовой стрелки; получим направление вектора Он направлен перпендикулярно плоскости пластины так же, как вектор  (см. рис. КЗб).
(см. рис. КЗб).
Определение  Так как
Так как  а векторы
а векторы  взаимно перпендикулярны, то
взаимно перпендикулярны, то  в момент времени
в момент времени 

Определение  Но теореме о сложении ускорений
Но теореме о сложении ускорений

Для определения  проведем координатные оси
проведем координатные оси  и вычислим проекции
и вычислим проекции  на эти оси. Учтем при этом, что векторы
на эти оси. Учтем при этом, что векторы  лежат на оси x а векторы
лежат на оси x а векторы  расположены в плоскости
расположены в плоскости  т.е. в плоскости пластины. Тогда, проектируя обе части равенства (7) на координатные оси
т.е. в плоскости пластины. Тогда, проектируя обе части равенства (7) на координатные оси  и учитывая одновременно равенства (3), (5), (6), получим для момента времени
и учитывая одновременно равенства (3), (5), (6), получим для момента времени 
Отсюда находим значение 
Ответ: 
Возможно эта страница вам будет полезна:
| Заказать работу по теоретической механике |
Многозвенный механизм. Плоское движение тела
Плоскопараллельное (плоское) движение твердого тела (краткие сведения из теории).
Признак движения: при движении тела каждая его точка остается на неизменном расстоянии от некоторой неподвижной плоскости, или иначе: точки тела остаются в плоскостях, параллельных неподвижной плоскости. Примером такого движения является качение колеса по неподвижной поверхности без проскальзывания.
Плоскопараллсльнос движение является сложным движением и может быть разложено на два простых движения:
Переносное поступательное, при котором все точки перемещаются как полюс (произвольно выбранная точка тела);
Относительное движение — вращение тела вокруг полюса.
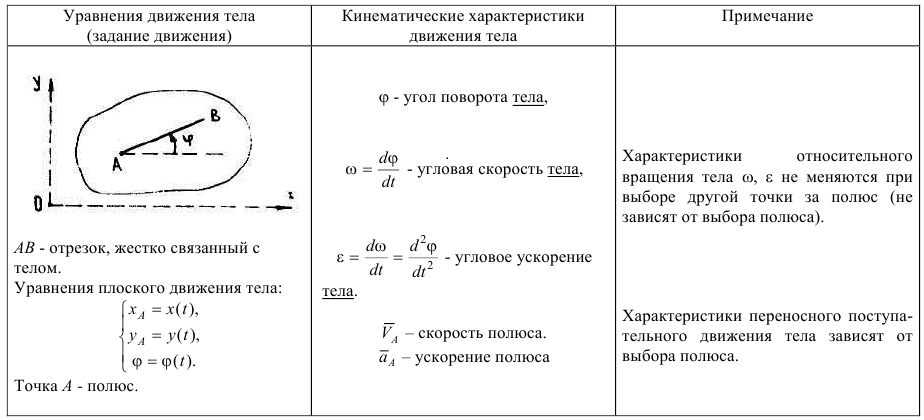
Определение абсолютной скорости  и абсолютного ускорения
и абсолютного ускорения  точки тела, совершающего плоскопараллельное движение.
точки тела, совершающего плоскопараллельное движение.
Абсолютное движение каждой точки тела — составное, следовательно, для определения абсолютной скорости и абсолютного ускорения точки применимы теорема сложения скоростей и теорема сложения ускорений при сложном движении точки (см. задачу КЗ). При записи этих теорем следует учесть конкретный вид переносного и относительного движений. За полюс удобно выбрать точку, скорость (ускорение) которой известна или легко может быть определена.
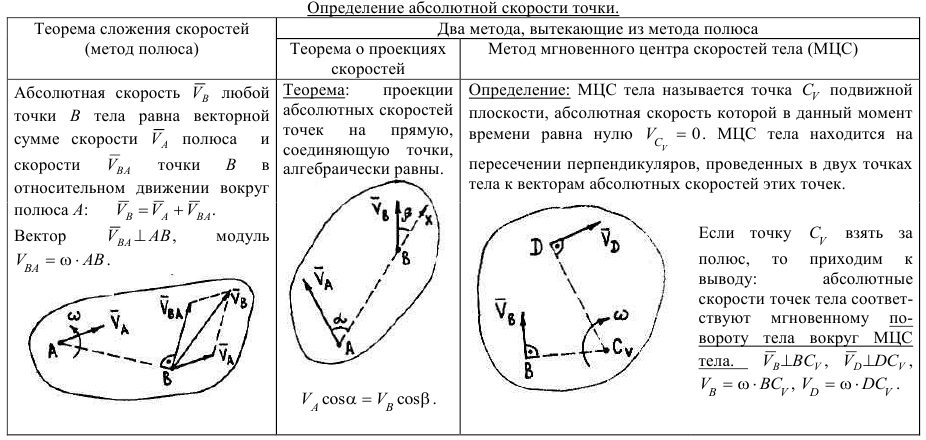
Определение абсолютного ускорения точки
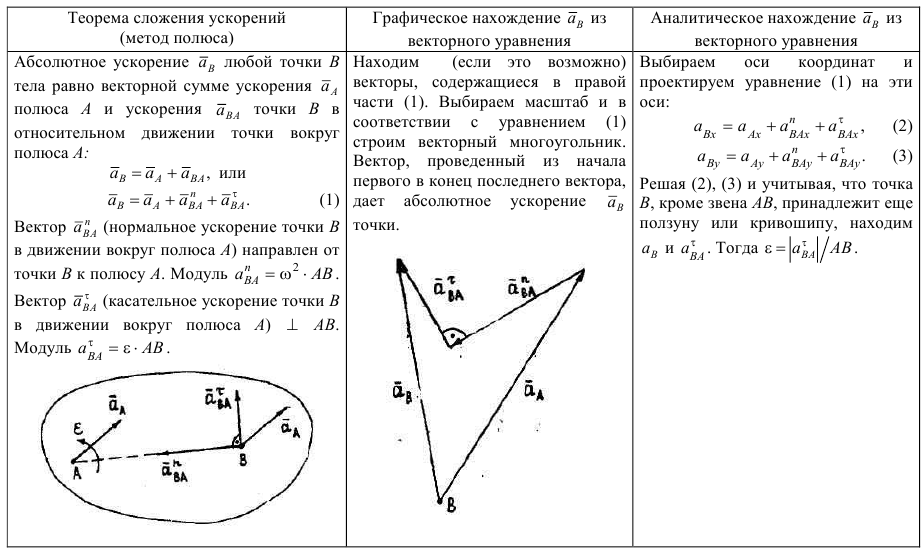
Задача №К4
Механизм (рис. К4а) состоит из стержней 1, 2, 3, 4 и ползуна В, соединенных друг с другом и с неподвижными опорами  шарнирами.
шарнирами.
Дано: 
 (направления
(направления  — против хода часовой стрелки).
— против хода часовой стрелки).
Определить: 
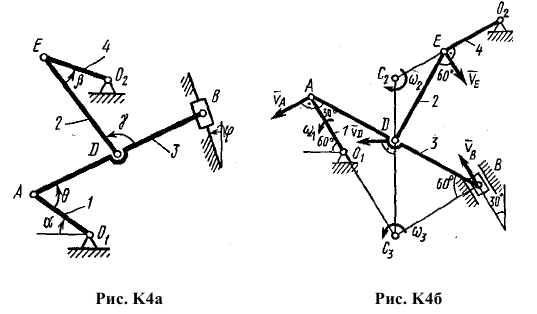
Решение:
1. Строим положение механизма в соответствии с заданными углами и длинами стержней (рис. К4б; на этом рисунке в процессе решения задачи изображаем всс векторы скоростей).
Определяем  Точка В принадлежит стержню 3, совершающему плоскопараллельное движение. Чтобы найти
Точка В принадлежит стержню 3, совершающему плоскопараллельное движение. Чтобы найти  нужно знать направление и скорость другой точки звена 3. Такой точкой является точка Л, принадлежащая еще звену 1 (звено вращается, см. задачу К2).
нужно знать направление и скорость другой точки звена 3. Такой точкой является точка Л, принадлежащая еще звену 1 (звено вращается, см. задачу К2).

Направление  найдем, учитывая, что точка В принадлежит одновременно ползуну, движущемуся вдоль направляющих поступательно. Теперь, зная
найдем, учитывая, что точка В принадлежит одновременно ползуну, движущемуся вдоль направляющих поступательно. Теперь, зная  и направление
и направление  воспользуемся теоремой о проекциях скоростей двух точек тела (стержня 3) на прямую, соединяющую эти точки (прямая АВ). Сначала по этой теореме устанавливаем, в какую сторону направлен вектор
воспользуемся теоремой о проекциях скоростей двух точек тела (стержня 3) на прямую, соединяющую эти точки (прямая АВ). Сначала по этой теореме устанавливаем, в какую сторону направлен вектор  (проекции скоростей должны иметь одинаковые знаки). Затем, вычисляя эти проекции, находим
(проекции скоростей должны иметь одинаковые знаки). Затем, вычисляя эти проекции, находим

Определяем  Точка Е принадлежит стержню 2, совершающему плоскопаралельное движение. Следовательно, по аналогии с предыдущим, чтобы определить надо сначала найти скорость точки D принадлежащей одновременно стержню 3. Для этого, зная
Точка Е принадлежит стержню 2, совершающему плоскопаралельное движение. Следовательно, по аналогии с предыдущим, чтобы определить надо сначала найти скорость точки D принадлежащей одновременно стержню 3. Для этого, зная  строим мгновенный центр скоростей (МЦС) стержня АВ\ это точка
строим мгновенный центр скоростей (МЦС) стержня АВ\ это точка  лежащая на пересечении перпендикуляров к восставленных из точек А и В. Но направлению вектора
лежащая на пересечении перпендикуляров к восставленных из точек А и В. Но направлению вектора  определяем направление мгновенного поворота стержня 3 вокруг МЦС Вектор
определяем направление мгновенного поворота стержня 3 вокруг МЦС Вектор  перпендикулярен отрезку
перпендикулярен отрезку  соединяющему точки D и и направлен в сторону мгновенного поворота тела. Величину
соединяющему точки D и и направлен в сторону мгновенного поворота тела. Величину  найдем из пропорции
найдем из пропорции

Чтобы вычислить  заметим, что
заметим, что  — прямоугольный, так как острые углы в нем равны 30° и 60°, и что
— прямоугольный, так как острые углы в нем равны 30° и 60°, и что 
Тогда  является равносторонним и
является равносторонним и  В результате равенство (3) даст
В результате равенство (3) даст

Так как точка Е принадлежит одновременно стержню 4, вращающемуся вокруг  В точках Е и D построим перпендикуляры к скоростям
В точках Е и D построим перпендикуляры к скоростям  получим точку
получим точку  — МЦС стержня 2. По направлению вектора
— МЦС стержня 2. По направлению вектора  определяем направление мгновенного поворота стержня 2 вокруг центра . Вектор
определяем направление мгновенного поворота стержня 2 вокруг центра . Вектор  направлен в сторону поворота этого стержня. Из рис. К4б видно, что
направлен в сторону поворота этого стержня. Из рис. К4б видно, что  откуда
откуда  Составив теперь пропорцию, найдем,
Составив теперь пропорцию, найдем,

Определяем  Так как МЦС стержня 2 известен (точка ) и
Так как МЦС стержня 2 известен (точка ) и  то
то

Определяем  (рис. К4в, на котором изображаем все векторы ускорений). Точка В принадлежит стержню 3. Чтобы найти , надо знать траекторию точки В и ускорение какой-нибудь другой точки стержня 3. Такой точкой является точка А, принадлежащая еще звену 1. Следовательно,
(рис. К4в, на котором изображаем все векторы ускорений). Точка В принадлежит стержню 3. Чтобы найти , надо знать траекторию точки В и ускорение какой-нибудь другой точки стержня 3. Такой точкой является точка А, принадлежащая еще звену 1. Следовательно,  где численно
где численно

Вектор  направлен вдоль
направлен вдоль  а
а  — перпендикулярно изображаем эти векторы на чертеже (см. рис. К4в). Так как точка В одновременно принадлежит ползуну, то вектор
— перпендикулярно изображаем эти векторы на чертеже (см. рис. К4в). Так как точка В одновременно принадлежит ползуну, то вектор  параллелен направляющим ползуна. Изображаем вектор на чертеже, полагая, что он направлен в ту же сторону, что и
параллелен направляющим ползуна. Изображаем вектор на чертеже, полагая, что он направлен в ту же сторону, что и  Для определения воспользуемся равенством (А — полюс):
Для определения воспользуемся равенством (А — полюс):

Изображаем на чертеже в точке В векторы:  (переносное ускорение точки В),
(переносное ускорение точки В),  (вдоль ВА от В к А)
(вдоль ВА от В к А)
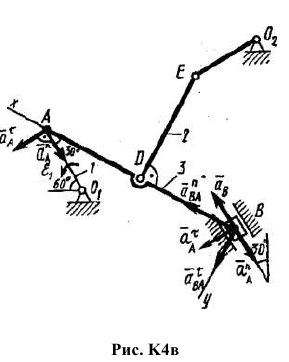
и  (в любую сторону перпендикулярно ВА); численно
(в любую сторону перпендикулярно ВА); численно  Найдя
Найдя  с помощью построенного МЦС стержня 3, получим
с помощью построенного МЦС стержня 3, получим

Таким образом, у величин, входящих в равенство (8), неизвестны только числовые значения  их можно найти, спроектировав обе части равенства (8) на какие-нибудь две оси.
их можно найти, спроектировав обе части равенства (8) на какие-нибудь две оси.
Чтобы определить  спроектируем обе части равенства (8) на направление ВА (ось .x), перпендикулярное неизвестному вектору
спроектируем обе части равенства (8) на направление ВА (ось .x), перпендикулярное неизвестному вектору  . Тогда получим
. Тогда получим

Подставив в равенство (10) числовые значения всех величин из (7) и (9), найдем, что
Так как  то вектор
то вектор  направлен, как показано на рис. К4в. 6.
направлен, как показано на рис. К4в. 6.
Определяем  Чтобы найти
Чтобы найти  сначала определим
сначала определим  Для этого обе части равенства (8) спроектируем на направление, перпендикулярное АВ (ось у). Тогда получим
Для этого обе части равенства (8) спроектируем на направление, перпендикулярное АВ (ось у). Тогда получим

Подставив в равенство (12) числовые значения всех величин из (11) и (7), найдем, что  Знак указывает, что направление
Знак указывает, что направление  противоположно направлению, показанному на рис. К4в.
противоположно направлению, показанному на рис. К4в.
Из равенства  получим
получим 
Ответ: 
Примечание. Если точка В, ускорение которой определяется, движется не прямолинейно (например, как на рис. К4.0-К4.4, где В принадлежит вращающемуся звену 4 и движется по окружности радиуса  то направление
то направление  заранее неизвестно. В этом случае также следует представить двумя составляющими
заранее неизвестно. В этом случае также следует представить двумя составляющими  и исходное уравнение (8) примет вид
и исходное уравнение (8) примет вид

При этом вектор  (см., например, рис. К4.0) будет направлен вдоль
(см., например, рис. К4.0) будет направлен вдоль  а вектор
а вектор  — перпендикулярно в любую сторону. Числовые значения
— перпендикулярно в любую сторону. Числовые значения  и
и  определяются так же, как в рассмотренной задаче (в частности, по условиям задачи может быть
определяются так же, как в рассмотренной задаче (в частности, по условиям задачи может быть  если точка А движется прямолинейно).
если точка А движется прямолинейно).
Значение  также вычисляется по формуле
также вычисляется по формуле  где l
где l
радиус окружности  определяется так же, как скорость любой другой точки механизма.
определяется так же, как скорость любой другой точки механизма.
После этого в равенстве (13) остаются неизвестными только значения  и
и  они, как и в рассмотренной задачи, находятся проектированием обеих частей равенства (13) на две оси.
они, как и в рассмотренной задачи, находятся проектированием обеих частей равенства (13) на две оси.
Найдя , можем вычислить искомое ускорение 
Величина служит для нахождения  (как в рассмотренной задаче).
(как в рассмотренной задаче).
Возможно эта страница вам будет полезна:
| Контрольная работа по теоретической механике |
Динамика
Динамика — это раздел теоретической механики, в котором изучаются механические движении материальных тел в зависимости от причин, их вызывающих.
Введение в динамику
- Предмет динамики и две ее основные задач
- Основные законы динамики
- Системы единиц в теоретической механике
Дифференциальные уравнения движения материальной точки
- Дифференциальные уравнения движения материальной точки в декартовых координатах
- Естественные уравнения движения материальной точки
- Решение первой основной задачи динамики точки с примерами решения
- Интегрирование дифференциальных уравнений движения материальной точки в простейших случаях с примерами решения
- Основное уравнение динамики для относительного движения материальной точки с примерами решения
Прямолинейные колебания материальной точки
- Прямолинейные колебания материальной точки
- Свободные колебания материальной точки с примером решения
- Затухающие колебания материальной точки с примером решения
- Вынужденные колебания материальной точки с примером решения
Введение в динамику системы
- Механическая система
- Центр масс системы
- Момент инерции тела относительно оси
- Теорема о моментах инерции тела относительно параллельных осей
- Моменты инерции некоторых однородных тел простейшей формы относительно их центральных осей симметрии с примером решения
- Об основных теоремах динамики
Теоремы об изменении количества движения точки и системы
- Количество движения точки и системы
- Выражение количества движения системы через массу системы и скорость ее центра масс
- Импульс силы
- Теорема об изменении количества движения материальной точки с примерами решения
- Теорема об изменении количества движения системы
- Закон сохранения количества движения системы
Теоремы об изменении момента количества движения точки и кинетического момента системы
- Теорема о движении центра масс системы с примерами решения
- Теорема об изменении момента количества движения точки
- Движение материальной точки под действием центральной силы
- Кинетический момент системы относительно центра и относительно оси с примером решения
- Теорема об изменении кинетического момента системы
- Закон сохранения кинетического момента системы с примерами решения
- Дифференциальное уравнение вращательного движения твердого тела вокруг неподвижной оси с примерами решения
- Физический маятник с примерами решения
- Дифференциальные уравнения плоского движения твердого тела
Работа и мощность силы
- Элементарная работа силы
- Работа силы на конечном пути с примером решения
- Графический способ вычисления работы
- Теорема о работе равнодействующей
- Работа силы тяжести с примером решения
- Работа силы упругости
- Работа внутренних сил неизменяемой системы
- Мощность силы с примером решения
- Работа и мощность силы, приложенной к вращающемуся телу с примером решения
Теоремы об изменении кинетической энергии точки и системы
- Теорема об изменении кинетической энергии точки с примерами решения
- Кинетическая энергия твердого тела с примерами решения
Метод кинетостатики и принцип возможных перемещений
- Метод кинетостатики в теоретической механике с примерами решения
- Определение динамических реакций опор вращающегося тела
- Возможные перемещения системы. Число степеней свободы
- Идеальные связи в теоретической механике
- Принцип возможных перемещений в теоретической механике с примерами решения
- Общее уравнение динамики в теоретической механике с примерами решения
Задачи динамики
В основу динамики точки положены законы Ньютона, устанавливающие зависимость ускорения материальной точки от сил, действующих на эту точку. А всякое движение материальной точки изучается только по отношению к некоторой системе координат и определяется силами, действующими в ней на данную точку.
Прежде всего необходимо научиться составлять уравнения движения материальной точки в различных системах отсчета и системах координат. Очень важно уметь построить минимальное количество дифференциальных уравнений движения материальной точки, из которых полностью определяется ее движение. Реакции связей могут быть определены после того, как будет определено движение точки.
При составлении дифференциальных уравнений движения точки необходимо использовать общие теоремы динамики и их первые интегралы. Общие теоремы в ряде случаев значительно упрощают исследование движения материальной точки и, кроме того, способствуют развитию интуиции.
Составлением дифференциальных уравнений движения не заканчивается, а только начинается исследование движения материальной точки. В конечном счете необходимо определить, как будет двигаться она при заданных начальных условиях, а в ряде задач еще потребуется знать, и как изменяется это движение при непрерывном изменении начальных условий. Нужно уметь определять траекторию точки и характер ее движения по этой траектории. Чтобы все это знать, необходимо уметь интегрировать уравнения движения материальной точки. Общие теоремы динамики и их первые интегралы представляют собой некоторые стандартные методы исследования ее движения. В целом ряде случаев эти стандартные методы значительно упрощают задачу интегрирования уравнений движения материальной точки.
Изучение движения точки относительно подвижной системы отсчета позволяет глубже раскрыть характер законов движения и действующих на точку сил, в зависимости от выбора той или иной системы отсчета.
Как обычно, мы начнем с рассмотрения наиболее простых задач, постепенно переходя к более сложным. Все задачи разобьем на следующие разделы:
- Прямолинейное движение материальной точки.
- Пространственное движение свободной материальной точки.
- Движение материальной точки по кривой и по поверхности.
- Движение материальной точки относительно подвижной системы отсчета.
Прямолинейное движение материальной точки
В случае прямолинейного движения положение материальной точки относительно некоторого неподвижного пространства определяется всего одной координатой, которой может быть расстояние материальной точки от некоторого фиксированного начала. Наиболее простым случаем здесь будет, по-видимому, вертикальное движение материальной точки в пустоте. Рассмотрим простейшею задачу такого движения.
Готовая задача с решением:
Пространственное движение материальной точки
При исследовании движения материальной точки в пространстве следует обратить внимание на определение сил, действующих на материальную точку. Без этого невозможно определить траекторию и характер движения точки. Особенно большое значение имеют задача о движении тяжелой материальной точки в пустоте и задача о движении материальной точки в центральном силовом поле. При исследовании движения большое значение приобретают общие теоремы динамики материальной точки. При решении задач необходимо использовать эти теоремы и их первые интегралы.
Готовая задача с решением:
- Задача №45. Материальная точка массы притягивается неподвижным центром с силой , где — постоянный коэффициент пропорциональности, — расстояние точки от . В начальный момент расстояние , а скорость образует с направлением угол . Найти уравнения движения точки и ее траекторию, принимая прямую за ось .
- Задача №46. Материальная точка совершает плоское движение под действием некоторой силы , причем траектория точки оказывается эллипсом а ее ускорение все время остается параллельным оси . В начальный момент точка находится на оси , а ее скорость равна . Определить силу» действующую на точку, в функции координат точки.
- Задача №47. С крепостной башни производят два выстрела, причем начальные скорости снарядов оказываются равными по величине и лежат в одной и той же вертикальной плоскости. Эти начальные скорости направлены под углами и к горизонту. Оба снаряда попадают в одну и ту же точку на поверхности Земли. Найти высоту башни, предполагая, что поверхность Земли вокруг башни горизонтальна и что сопротивление воздуха отсутствует.
- Задача №48. Материальная точка описывает параболу под действием двух равных по величине сил, одна из которых направлена к фокусу параболы и обратно пропорциональна расстоянию точки от этого фокуса. Другая сила параллельна оси абсцисс и направлена в положительную сторону этой осн. Показать, что точка движется по параболе равномерно и определить величину скорости точки.
- Задача №49. Материальная точка массы описывает окружность радиуса , притягиваясь некоторой точкой этой окружности. Найти силу притяжения и скорость точки в зависимости от расстояния точки от .
Движение материальной точки по кривой и по поверхности
При исследовании движения материальной точки по кривой положение точки определяется всего одним параметром, а следовательно и для определения движения достаточно знать всего одно уравнение движения, в которое не входит лишних неизвестных. Такое уравнение может быть получено либо при помощи теоремы живых сил, либо из естественных уравнений движения. Другие уравнения дают возможность определять реакции связей.
При исследовании движения точки но поверхности мы имеем дело уже с двухпараметрической задачей и одного уравнении уже оказывается недостаточно для определения движения материальной точки. Тем не менее, желательно и в этих случаях научиться составлять уравнения движения так, чтобы в них не входили лишние неизвестные. Это удается далеко не всегда. Чаше всего к желаемому результату приводят теоремы живых сил и момента количества движения. В некоторых случаях полезно применять естественные уравнения движения точки. Упрощения получаются за счет симметрии поверхности, если такая может быть обнаружена.
Наибольшие затруднения представляет вопрос определения реакции связи.
Готовая задача с решением:
- Задача №50. Тяжелое колечко массы надето на гладкую вертикально расположенную проволочную окружность радиуса . Колечко может свободно передвигаться по ней. В начальный момент оно находится в самой нижней точке окружности и ему сообщена начальная скорость . Найти условия, при которых колечко совершит полный оборот по окружности и определить давление на нее колечка, когда оно находится в самой верхней ее точке.
- Задача №51. По внешней стороне параболы с горизонтальной осью, уравнение которой , скатывается без трения и без начальной скорости шарик, начальная ордината которого . В какой точке шарик соскочит с параболы?
- Задача №52. Тяжелый шарик, масса которого равна , нанизан на горизонтальную проволочную окружность радиуса с коэффициентом трения . Определить, какую начальную скорость нужно сообщить шарику, чтобы он сделал по окружности один полный оборот.
- Задача №53. Тяжелая материальная точка движется по внутренней поверхности прямого кругового конуса, вершина которого обращена вниз, а ось симметрии вертикальна. Угол при вершине равен . В начальный момент расстояние точки от вершины конуса равно , начальная скорость равна и направлена перпендикулярно к образующей конуса. Определить траекторию точки и давление, которое она оказывает на поверхность конуса.
- Задача №54. Тяжелая материальная точка вынуждена оставаться на совершенно гладкой плоскости, которая равномерно вращается вокруг горизонтальной оси, расположенной в самой плоскости. В начальный момент точка находится на оси вращения, а ее скорость направлена вдоль оси вращения и равна . Определить закон движения точки.
- Задача №55. Материальная точка весом подвешена при помощи двух одинаковых нитей к двум опорам, находящимся на одном и том же горизонтальном уровне, причем угол наклона каждой нити к вертикали равен . Внезапно одну из нитей перерезают. Доказать, что натяжение другой нити мгновенно изменится в отношении .
- Задача №56. Материальная точка совершает колебания на гладкой параболе с вертикальной осью, изменяя направление своего движения на концах хорды, проходящей через фокус параболы перпендикулярно к оси параболы. Найти давление точки на параболу в самой нижней точке.
- Задача №57. По лемнискате, уравнение которой , скользит вниз от вершины весомая материальная точка , начиная движение без начальной скорости. Определить время движения до точки в зависимости от угла при отсутствии трения.
- Задача №58. Точка вынуждена оставаться на параболе и движется по этой параболе без воздействия внешних сил, находясь в начальный момент в положении и имея начальную скорость , направленную к вершине параболы. Через сколько времени точка достигнет вершины параболы?
Движение материальной точки относительно подвижной системы отсчета
До сих пор, определяя движение материальной точки, мы предполагали, что имеется некоторая неподвижная система отсчета. В этой системе задаются силы, действующие на материальную точку, и движение точки относительно системы отсчета определяется вторым законом Ньютона. Кроме того было установлено, что второй закон Ньютона определяет движение точки относительно любой инерциальной системы отсчета. При этом нигде не говорилось о том, как обнаружить такую инерциальную систему отсчета.
Переходя к изучению конкретных явлений, мы очень быстро убедимся, что движение всегда приходится определять относительно таких систем отсчета, которые сами совершают движение и не являются инерциальными системами. Так, изучая падение материальной точки вблизи поверхности Земли, мы обычно определяем движение относительно системы отсчета, связанной с Землей. Но такая система вместе с Землей в свою очередь совершает сложное движение в пространство. Ома вращается вокруг земной оси и вместе с Землей вращается вокруг Солнца.
И все же можно потребовать, чтобы движение относительно таких подвижных систем отсчета определялось бы теми же законами, которые действуют и в неподвижной системе. Эта инвариантность законов .движения .будет связана с определением силы. Так как в различных системах координат точка будет иметь различное ускорение, то и сила, определяющая это ускорение, должна быть в них различной. Как показывается в курсах теоретической механики, при переходе от одной системы отсчета к другой к действующим на материальную точку силам необходимо добавлять силы Кориолиса. Силы Корbолиса являются реальными силами, определяющими движение материальной точки относительно некоторой системы отсчета. Сама же система теперь может рассматриваться как неподвижная. При этом, очевидно, оказываются справедливыми все законы динамики материальной точки.
Силы Корнолиса можно разделить на две группы. К первой относится сила Корнолиса от переносного ускорения  , где
, где  — переносное ускорение точки, и сила Кориолиса от добавочного ускорения точки
— переносное ускорение точки, и сила Кориолиса от добавочного ускорения точки  или
или

где  — угловая скорость вращения подвижной системы отсчета, a
— угловая скорость вращения подвижной системы отсчета, a  — относительная скорость движения материальной точки.
— относительная скорость движения материальной точки.
При решении задач на относительное движение точки особенно внимательно нужно следить за определением сил, действующих на точку в данной системе координат.
Готовая задача с решением:
- Задача №59. Математический маятник подвешен внутри вагона, движущегося по прямолинейным рельсам с постоянным ускорением . Определить период колебаний маятника, предполагая, что нить, на которой подвешен маятник, нерастяжима и имеет длину (рис. 62).
- Задача №60. Прямолинейная трубка вращается в вертикальной плоскости вокруг горизонтальной оси с постоянной угловой скоростью . В трубке находится тяжелый шарик массы , прикрепленный к пружине, другой конец которой закреплен в точке . Найти закон движения шарика относительно трубки, считая упругую силу пружины пропорциональной ее удлинению с коэффициентом пропорциональности . В начальный момент трубка горизонтальна, а относительная скорость шарика равна нулю. Пружина в начальный момент имеет естественную длину . Рассмотреть случай.
- Задача №61. Окружность радиуса , плоскость которой вертикальна, вращается вокруг своего вертикального неподвижного диаметра с постоянной по величине угловой скоростью . По окружности может свободно скользить тяжелая материальная точка массы . Определить положение относительного равновесия материальной точки и найти период малых колебаний точки около положения устойчивого равновесия.
Динамика — решение задач с примерами
Динамика изучает движение материальных точек и механических систем с учетом сил, которые влияют на это движение.
Динамика точки
Второй закон динамики точки в инерциальной системе отсчета:

где m — масса точки,  абсолютное ускорение точки,
абсолютное ускорение точки,  векторная сумма сил, действующих на точку (равнодействующая). Уравнение (1) — это дифференциальное уравнение движения точки в векторной форме. Спроектировав (1) на оси декартовой системы координат, получаем систему дифференциальных уравнений движения точки в координатной форме:
векторная сумма сил, действующих на точку (равнодействующая). Уравнение (1) — это дифференциальное уравнение движения точки в векторной форме. Спроектировав (1) на оси декартовой системы координат, получаем систему дифференциальных уравнений движения точки в координатной форме:

где  и т.д.
и т.д.
Первая задача динамики точки: заданы уравнения движения точки в координатной форме (см. задачу К1)

найти силу  действующую на точку. Решение: получив дифференциальные уравнения (2), дифференцируем заданные функции (3), подставляем в (2), находим
действующую на точку. Решение: получив дифференциальные уравнения (2), дифференцируем заданные функции (3), подставляем в (2), находим 
Вторая задача динамики точки (основная): задана сила действующая на точку; найти кинематические уравнения движения (3) точки. Решение: составив уравнение (1) и спроектировав его на оси, получим уравнения (2). Добавив начальные условия (при  проинтегрируем (2) и найдем (3).
проинтегрируем (2) и найдем (3).
Задача №Д1
На вертикальном участке AВ трубы (рис. Д1) на груз D массой m действуют сила тяжести и сила сопротивления  расстояние от точки А, где
расстояние от точки А, где  до точки В равно l На наклонном участке ВС на груз действуют сила тяжести и переменная сила
до точки В равно l На наклонном участке ВС на груз действуют сила тяжести и переменная сила  заданная в ньютонах.
заданная в ньютонах.
Дано: 

Определить:  — закон движения груза на участке ВС.
— закон движения груза на участке ВС.
Решение:
1. Рассмотрим движение груза на участке АВ, считая груз материальной точкой. Изображаем груз (в произвольном положении) и приложенные к нему силы  Запишем дифференциальное уравнение движения груза в векторной форме:
Запишем дифференциальное уравнение движения груза в векторной форме:
Проводим ось Az в сторону движения точки и проектируем (1) на эту ось:
где учтено, что  Подчеркнем, что в уравнении (2) все
Подчеркнем, что в уравнении (2) все
переменные силы надо обязательно выразить через величины, от которых они зависят. Учитывая, что  делая замену
делая замену  получим уравнение
получим уравнение
Разделим обе части (3) на m и введем обозначение
Тогда уравнение (3) приобретает вид
Решим уравнение (4). Разделим переменные V и z, выполнив два действия: обе части (4) умножим на dz и разделим на  получим:
получим:
Интегрируя это уравнение, найдем:
Находим  Подставим в (5) начальные условия:
Подставим в (5) начальные условия: 
Найденное выражение для подставляем в (5):

ИЛИ

Отсюда
Полагая в равенстве (6)  и подставляя ранее найденное
и подставляя ранее найденное  определим скорость
определим скорость  груза в точке В:
груза в точке В:
Рассмотрим движение груза на участке ВС: найденная скорость будет для движения на этом участке начальной скоростью  Изображаем груз (в произвольном положении) и действующие на него силы (активные и реакции связей):
Изображаем груз (в произвольном положении) и действующие на него силы (активные и реакции связей):  Запишем дифференциальное уравнение движения груза в векторной форме:
Запишем дифференциальное уравнение движения груза в векторной форме:
Проведем из точки В оси Вх (в сторону движения точки) и By и проектируем (8) на ось Вх:

где учтено, что  Сила N неизвестна; следовательно, прежде чем интегрировать (9), найдем N, решив первую задачу динамики точки. Для этого спроектируем векторное уравнение (8) на ось By:
Сила N неизвестна; следовательно, прежде чем интегрировать (9), найдем N, решив первую задачу динамики точки. Для этого спроектируем векторное уравнение (8) на ось By:

Учтем, что движение точки происходит по прямой,  и, следовательно,
и, следовательно,  Тогда из (10) получаем
Тогда из (10) получаем  Подставим этот результат в (9):
Подставим этот результат в (9):

Подставим в это уравнение заданные численные значения (чтобы избежать громоздкой записи). Тогда получим
Решим уравнение (11). Разделим переменные  Умножим обе части (11) на dt:
Умножим обе части (11) на dt:

интегрируя, найдем

Находим  Подставим в (12) начальные условия:
Подставим в (12) начальные условия:  дастся равенством (7). Найденное значение
дастся равенством (7). Найденное значение  подставляем в (12):
подставляем в (12):

Так как  то
то
Решим уравнение (13). Разделим переменные x и t. Умножим обе части (13) на dt:

интегрируя, найдем

Находим  Подставим в (14) начальные условия:
Подставим в (14) начальные условия:  Найденное значение
Найденное значение  подставляем в (14):
подставляем в (14):

Ответ: 
Теорема о движении центра масс системы
Основные понятия
Механической системой называется множество взаимодействующих точек и тел. Центром масс системы называется геометрическая точка С, декартовы координаты которой равны 
 — координаты точки системы,
— координаты точки системы,  — масса точки,
— масса точки,  масса системы. Силы взаимодействия точек системы называются
масса системы. Силы взаимодействия точек системы называются
внутренними силами; они обозначаются  Силы, действующие на точки системы со стороны точек и тел, не входящих в систему, называются внешними илами; они обозначаются
Силы, действующие на точки системы со стороны точек и тел, не входящих в систему, называются внешними илами; они обозначаются  Свойства внутренних сил: главный вектор
Свойства внутренних сил: главный вектор  главный момент
главный момент 
Дифференциальное уравнение движения центра масс системы в векторной форме
где М — масса системы,  — абсолютное ускорение центра масс системы,
— абсолютное ускорение центра масс системы,  — векторная сумма внешних сил, действующих на точки системы. По форме уравнение (1) совпадает с дифференциальным уравнением движения материальной точки
— векторная сумма внешних сил, действующих на точки системы. По форме уравнение (1) совпадает с дифференциальным уравнением движения материальной точки  и теорема о движении центра масс системы формулируется следующим образом:
и теорема о движении центра масс системы формулируется следующим образом:
Центр масс системы движется как материальная точка, масса которой равна массс всей системы и на которую действуют силы, приложенные к точкам системы.
Следовательно, применяя эту теорему, можно решать две задачи динамики, аналогично задаче Д1.
Частные случаи (законы сохранения движения центра масс)
а) Из уравнения (1) следует: если внешние силы таковы, что  то
то
 и, следовательно,
и, следовательно,  это означает, что центр масс системы движется прямолинейно и равномерно.
это означает, что центр масс системы движется прямолинейно и равномерно.
б) Записав уравнение (1) в проекции на ось, получим
Частный случай: если выполнены одновременно два условия

то  — координата
— координата  центра масс системы остается постоянной и равной своему начальному значению
центра масс системы остается постоянной и равной своему начальному значению

где  — координата центра масс в произвольный момент времени,
— координата центра масс в произвольный момент времени,  координата центра масс в начальный момент времени.
координата центра масс в начальный момент времени.
Задача №Д2
Механическая система состоит из грузов  массой
массой  массой
массой  и из прямоугольной вертикальной плиты массой
и из прямоугольной вертикальной плиты массой  движущейся вдоль горизонтальных направляющих (рис. Д2). В момент времени
движущейся вдоль горизонтальных направляющих (рис. Д2). В момент времени  когда система находилась в покос, под действием внутренних сил грузы начинают двигаться по желобам, представляющим собой окружности радиусов r и R, по законам
когда система находилась в покос, под действием внутренних сил грузы начинают двигаться по желобам, представляющим собой окружности радиусов r и R, по законам 
Дано: 

Определить:  — закон движения плиты,
— закон движения плиты,  — закон изменения со временем полной нормальной реакции направляющих.
— закон изменения со временем полной нормальной реакции направляющих.
Решение:
Рассмотрим механическую систему, состоящую из плиты и грузов  в произвольном положении (рис. Д2). Изобразим на рисунке действующие на систему внешние силы: силы тяжести
в произвольном положении (рис. Д2). Изобразим на рисунке действующие на систему внешние силы: силы тяжести  и реакцию направляющих
и реакцию направляющих  Запишем уравнение движения центра масс системы в векторной форме:
Запишем уравнение движения центра масс системы в векторной форме:

Проведем координатные оси Оху так, чтобы ось у проходила через точку  где находился центр масс плиты в момент времени
где находился центр масс плиты в момент времени 
а) Определение перемещения  (вторая задача динамики). Для определения
(вторая задача динамики). Для определения  спроектируем уравнение (1) на ось .x Получим
спроектируем уравнение (1) на ось .x Получим

так как все внешние силы перпендикулярны оси x и поэтому 
Отметим также, что  Поэтому, интегрируя дважды уравнение (2), получим:
Поэтому, интегрируя дважды уравнение (2), получим:

(закон сохранения координаты центра масс системы). Из (3) следует, что

Определим значение  Координата
Координата  центра масс системы определяется по формуле
центра масс системы определяется по формуле

Из рис. Д2 видно, что в произвольный момент времени абсциссы грузов равны соответственно  Подставляя эти выражения в формулу (5) и учитывая заданные зависимости
Подставляя эти выражения в формулу (5) и учитывая заданные зависимости  получим
получим

Определим значение  Подставляя в (6)
Подставляя в (6)  получим
получим

В соответствии с уравнением (4), приравниваем правые части (6) и (7):

Отсюда получаем зависимость от времени координаты 
Ответ: 
б) Определение реакции N (первая задача динамики). Для определения  спроектируем векторное уравнение (1) на вертикальную ось у (см. рис. Д2):
спроектируем векторное уравнение (1) на вертикальную ось у (см. рис. Д2):

Отсюда получим, учитывая, что  и т.д.:
и т.д.:

где  пока неизвестно. Для нахождения
пока неизвестно. Для нахождения  определим сначала Координата центра масс системы определяется по формуле
определим сначала Координата центра масс системы определяется по формуле

Из рис. Д2 видно, что в произвольный момент времени ординаты грузов равны соответственно

Подставляя эти выражения в формулу (10) и учитывая заданные зависимости  получим
получим

Продифференцировав обе части этого равенства два раза по времени, найдем 
Подставив это значение  в уравнение (9), определим искомую зависимость
в уравнение (9), определим искомую зависимость 
Ответ:  ньютонах.
ньютонах.
Теорема об изменении кинетического момента системы относительно оси
Основные понятия
Количество движения (импульс) точки — это вектор, равный  где m масса точки,
где m масса точки,  абсолютная скорость точки.
абсолютная скорость точки.
Момент количества движения точки относительно какой-либо оси z  определяется так же, как момент силы относительно оси z
определяется так же, как момент силы относительно оси z  в частности,
в частности,  если вектор параллелей z или прямая, на которой расположен вектор , пересекает ось z.
если вектор параллелей z или прямая, на которой расположен вектор , пересекает ось z.
Кинетический момент системы  относительно какой-либо оси z равен (алгебраической) сумме моментов количеств движения точек относительно этой оси:
относительно какой-либо оси z равен (алгебраической) сумме моментов количеств движения точек относительно этой оси:
Кинетический момент вращающегося твердого тела относительно (неподвижной) оси вращения z равен

где  — угловая скорость тела,
— угловая скорость тела,
 —
—
момент инерции тела относительно оси z; здесь  — масса точки тела,
— масса точки тела,  расстояние от этой точки до оси z.
расстояние от этой точки до оси z.
Момент инерции тела зависит от формы тела и положения оси z. Значения  для однородных тел простой формы (кольцо, стержень, диск, прямоугольник, цилиндр и т. д.) приводятся в справочниках по механике; значения необходимые для решения данной задачи, приведены ниже в указаниях к решению.
для однородных тел простой формы (кольцо, стержень, диск, прямоугольник, цилиндр и т. д.) приводятся в справочниках по механике; значения необходимые для решения данной задачи, приведены ниже в указаниях к решению.
Если задан радиус инерции р тела, то  где М — масса тела.
где М — масса тела.
Теорема Гюйгенса (теорема о моментах инерции относительно параллельных осей):  где
где  — момент инерции тела относительно оси, проходящей через центр масс,
— момент инерции тела относительно оси, проходящей через центр масс,  — момент инерции тела относительно оси Az, параллельной оси Cz, М — масса тела, d — расстояние между осями Az и Cz.
— момент инерции тела относительно оси Az, параллельной оси Cz, М — масса тела, d — расстояние между осями Az и Cz.
Теорема об изменении кинетического момента системы относительно неподвижной оси
Формулировка: производная по времени от кинетического момента системы относительно неподвижной оси z равна (алгебраической) сумме моментов внешних сил относительно этой оси; математическая запись:
Частный случай (закон сохранения 
Если внешние силы таковы, что  то есть
то есть

Дифференциальное уравнение вращательною движения твердою тела
Для вращающегося твердого тела, подставляя (1) в (2) и учитывая, что  найдем
найдем
дифференциальное уравнение вращательного движения твердого тела; здесь  угловое ускорение тела.
угловое ускорение тела.
Задача №ДЗ
Однородная горизонтальная платформа (прямоугольная со сторонами  имеющая массу
имеющая массу  жестко скреплена с вертикальным валом и вращается вместе с ним вокруг оси z с угловой скоростью
жестко скреплена с вертикальным валом и вращается вместе с ним вокруг оси z с угловой скоростью  (рис. ДЗа). В момент времени
(рис. ДЗа). В момент времени  на вал начинает действовать пара сил с вращающим моментом
на вал начинает действовать пара сил с вращающим моментом  (на рис. ДЗ отрицательный знак М уже учтен в показанных противоположных направлениях
(на рис. ДЗ отрицательный знак М уже учтен в показанных противоположных направлениях  одновременно груз D массой
одновременно груз D массой  находящийся в желобе АВ в точке С, начинает двигаться по желобу (под действием внутренних сил) по закону
находящийся в желобе АВ в точке С, начинает двигаться по желобу (под действием внутренних сил) по закону 
Дано:  ( s — в метрах, t — в секундах),
( s — в метрах, t — в секундах), 
Определить:  закон изменения угловой скорости платформы.
закон изменения угловой скорости платформы.
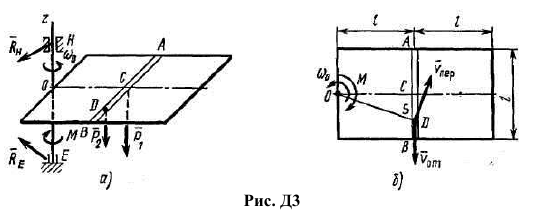
Решение:
Рассмотрим механическую систему, состоящую из платформы и груза D. Для определения угловой скорости  применим теорему об изменении кинетического момента системы относительно оси z:
применим теорему об изменении кинетического момента системы относительно оси z:
Изобразим действующие на систему внешние силы: силы тяжести  реакции подпятника
реакции подпятника  подшипника
подшипника  и вращающий момент М. Так как силы
и вращающий момент М. Так как силы  параллельны оси z, а реакции
параллельны оси z, а реакции  эту ось пересекают, то их моменты относительно оси z равны нулю. Тогда, считая для момента положительным направление
эту ось пересекают, то их моменты относительно оси z равны нулю. Тогда, считая для момента положительным направление  (т.е. против хода часовой стрелки), получаем
(т.е. против хода часовой стрелки), получаем

и уравнение (1) принимает вид:

Умножая обе части этого уравнения на dt и интегрируя, получим
Для рассматриваемой механической системы

где  — кинетические моменты относительно оси z платформы и груза D соответственно.
— кинетические моменты относительно оси z платформы и груза D соответственно.
Поскольку платформа вращается вокруг оси z, то ее кинетический момент равен произведению момента инерции относительно оси z на угловую скорость:

Значение момента инерции платформы относительно оси z найдем по теореме Гюйгенса:

где  — момент инерции платформы относительно оси Cz, параллельной оси z и проходящей через центр масс платформы С. Момент
— момент инерции платформы относительно оси Cz, параллельной оси z и проходящей через центр масс платформы С. Момент
инерции относительно оси, проходящей через центр масс платформы перпендикулярно се плоскости, равен:

Тогда

Следовательно,

Для определения  обратимся к рис. ДЗб и рассмотрим движение груза D как сложное, считая его движение по платформе относительным движением, а вращение самой платформы вокруг оси z — переносным движением. Тогда абсолютная скорость груза
обратимся к рис. ДЗб и рассмотрим движение груза D как сложное, считая его движение по платформе относительным движением, а вращение самой платформы вокруг оси z — переносным движением. Тогда абсолютная скорость груза  и по теореме Вариньона,
и по теореме Вариньона,

Так как груз D движется по закону  то
то
Изображаем вектор  на рис. ДЗб с учетом знака
на рис. ДЗб с учетом знака  (при
(при  направление было бы противоположным).
направление было бы противоположным).
Затем, учитывая направление угловой скорости  изображаем вектор переносной скорости
изображаем вектор переносной скорости  Модуль переносной скорости равен
Модуль переносной скорости равен
Тогда равенство (8) примет вид:

Но на рис. ДЗб видно, что

тогда

Подставляя  из (7) и (10) в равенство (4), получим с учетом данных задачи:
из (7) и (10) в равенство (4), получим с учетом данных задачи:

Тогда уравнение (3), где  принимает вид
принимает вид

Постоянную интегрирования определяем из начального условия: при 
 откуда получаем
откуда получаем

При этом значении  из уравнения (12) находим искомую зависимость от t
из уравнения (12) находим искомую зависимость от t
Ответ: 
где t — в секундах, со 
Теорема об изменении кинетической энергии системы
Кинетическая энергия. Кинетической энергией точки называется величина  , где m — масса точки, — абсолютная скорость точки.
, где m — масса точки, — абсолютная скорость точки.
Кинетическая энергия механической системы
где  — масса точки системы,
— масса точки системы,  — абсолютная скорость этой точки. Для твердого тела из (1) следует, что при поступательном движении твердого тела
— абсолютная скорость этой точки. Для твердого тела из (1) следует, что при поступательном движении твердого тела

где М — масса тела, — скорость тела;
при вращении твердого тела вокруг неподвижной оси

где  — момент инерции тела относительно оси вращения,
— момент инерции тела относительно оси вращения,  — угловая скорость тела;
— угловая скорость тела;
при плоском движении тела
где М — масса тела,  — скорость центра масс тела, — момент инерции тела относительно оси, проходящей через центр масс С тела, перпендикулярно плоскости сечения, — угловая скорость тела.
— скорость центра масс тела, — момент инерции тела относительно оси, проходящей через центр масс С тела, перпендикулярно плоскости сечения, — угловая скорость тела.
Момент инерции тела относительно оси z — это величина
где  — масса точки тела,
— масса точки тела,  — расстояние от этой точки до оси z.
— расстояние от этой точки до оси z.
Момент инерции тела зависит от формы тела и положения оси z. Значения  для однородных тел простой формы (кольцо, стержень, диск, прямоугольник, цилиндр и т. д.) приводятся в справочниках по механике; значения необходимые для решения данной задачи, приведены ниже в указаниях к решению.
для однородных тел простой формы (кольцо, стержень, диск, прямоугольник, цилиндр и т. д.) приводятся в справочниках по механике; значения необходимые для решения данной задачи, приведены ниже в указаниях к решению.
Если задан радиус инерции р тела, то  где М — масса тела.
где М — масса тела.
Элементарная работа силы dA на бесконечно малом перемещении ds точки, в которой приложена сила, равна

где  — сила, ds — модуль бесконечно малого перемещения точки,
— сила, ds — модуль бесконечно малого перемещения точки,  скорость точки, в которой приложена сила (направление ds совпадает с направлением ). Выражение (2) — одна из возможных форм записи dA. Например, если учесть, что
скорость точки, в которой приложена сила (направление ds совпадает с направлением ). Выражение (2) — одна из возможных форм записи dA. Например, если учесть, что  то из (2) следует еще одна форма записи:
то из (2) следует еще одна форма записи:

где dt — время бесконечно малого перемещения. Из (2) (или (3)) следует, что
Если сила приложена к точке вращающегося тела, то, применяя (2), получим

где  — момент силы относительно оси вращения тела,
— момент силы относительно оси вращения тела,  бесконечно малый угол поворота тела. Если на тело действует пара сил, то (4) даст элементарную работу пары сил, где — момент пары сил относительно оси z.
бесконечно малый угол поворота тела. Если на тело действует пара сил, то (4) даст элементарную работу пары сил, где — момент пары сил относительно оси z.
Работа силы на конечном перемещении точки из 
Из (5) следуют выражения для работы силы в частных случаях.
Работа силы тяжести (постоянной):
где  — сила тяжести,
— сила тяжести,  — перемещение центра масс тела по вертикали. Знак соответствует движению центра масс вверх.
— перемещение центра масс тела по вертикали. Знак соответствует движению центра масс вверх.
Работа упругой силы пружины:
где с — жесткость пружины,  — начальное и конечное удлинение (или сжатие) пружины.
— начальное и конечное удлинение (или сжатие) пружины.
Работа пары сил, приложенной к вращающемуся телу, при повороте тела на угол  , равна
, равна
где  — момент пары сил относительно оси вращения. Если
— момент пары сил относительно оси вращения. Если  то
то

Если пара сил препятствует вращению тела, то 
Теорема об изменении кинетической энергии системы
Формулировка (в интегральной (конечной) форме): изменение кинетической энергии системы на некотором конечном перемещении системы из одного положения в другое равно сумме работ всех внешних и внутренних сил, приложенных к точкам системы на соответствующих конечных перемещениях точек приложения этих сил.
Математическая запись:

Если система состоит из абсолютно твердых тел, соединенных нерастяжимыми нитями или стержнями {неизменяемая система), то 
Возможно эта страница вам будет полезна:
| Курсовая работа по теоретической механике |
Задача №Д4
Механическая система (рис. Д4а) состоит из сплошного однородного цилиндрического катка 1, подвижного блока 2, ступенчатого шкива 3 с радиусами ступеней  и радиусом инерции относительно оси вращения
и радиусом инерции относительно оси вращения  блока 4 и груза 5 (коэффициент трения груза о плоскость равен
блока 4 и груза 5 (коэффициент трения груза о плоскость равен  Тела системы соединены друг с другом нитями, намотанными на шкив 3. К центру Е блока 2 прикреплена пружина с коэффициентом жесткости с, ее начальная деформация равна нулю; массами нити и пружины пренебречь.
Тела системы соединены друг с другом нитями, намотанными на шкив 3. К центру Е блока 2 прикреплена пружина с коэффициентом жесткости с, ее начальная деформация равна нулю; массами нити и пружины пренебречь.
Система приходит в движение из состояния покоя под действием силы  зависящей от перемещения s точки ее приложения. На шкив 3 при движении действует постоянный момент М сил сопротивления.
зависящей от перемещения s точки ее приложения. На шкив 3 при движении действует постоянный момент М сил сопротивления.
Дано:  =
= 
Определить: угловую скорость  в тот момент времени, когда
в тот момент времени, когда  где
где  — перемещение центра масс катка 1.
— перемещение центра масс катка 1.
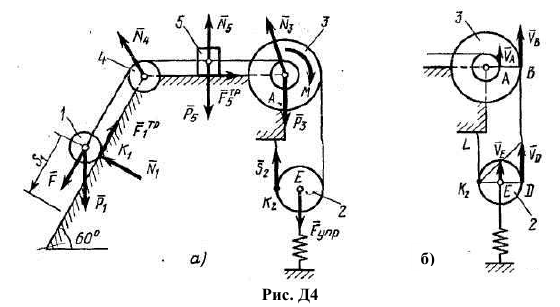
Решение:
1. Рассмотрим движение механической системы, состоящей из весомых тел 1, 3, 5 и невесомых тел 2, 4, соединенных нитями (рис. Д4а).
Для определения искомой угловой скорости воспользуемся теоремой об изменении кинетической энергии системы в интегральной (конечной) форме:

где  — кинетическая энергия системы в начальном и конечном положениях,
— кинетическая энергия системы в начальном и конечном положениях,  — алгебраические суммы работ действующих на систему внешних и внутренних сил при перемещении системы из начального положения в конечное.
— алгебраические суммы работ действующих на систему внешних и внутренних сил при перемещении системы из начального положения в конечное.
Сразу отмстим в (1) равные нулю слагаемые. В начальный момент система находилась в покос, поэтому начальная кинетическая энергия равна нулю  Далее, так как система является неизменяемой, то
Далее, так как система является неизменяемой, то  Поэтому на рисунке изображены только внешние силы, действующие на тела системы, а внутренние силы не показаны.
Поэтому на рисунке изображены только внешние силы, действующие на тела системы, а внутренние силы не показаны.
Определяем кинетическую энергию системы T в конечном положении (левая часть уравнения (1)). Величина T равна сумме кинетических энергий всех тел системы:

Так как по условию задачи массы тел 2 и 4 равны нулю, эти тела не обладают кинетической энергией, однако для общности изложения мы проведем здесь вычисление кинетической энергии этих тел (но при решении своей задачи следует сразу полагать кинетическую энергию тел, массами которых пренебрегаем, равной нулю).
Кинетическая энергия катка 1, совершающего плоское (сложное) движение, равна
где  — масса катка 1,
— масса катка 1,
 — скорость его центра масс
— скорость его центра масс 
 — угловая скорость катка 1,
— угловая скорость катка 1,
 — момент инерции катка относительно оси, проходящей через его центр масс перпендикулярно плоскости катка. Так как каток 1 является однородным цилиндром,то
— момент инерции катка относительно оси, проходящей через его центр масс перпендикулярно плоскости катка. Так как каток 1 является однородным цилиндром,то
Кинетическая энергия блока 4, совершающего вращательное движение, равна
где  — угловая скорость блока 4,
— угловая скорость блока 4,
 — момент инерции блока относительно оси, проходящей через его центр масс перпендикулярно плоскости блока. Если блок 4 является однородным диском, то
— момент инерции блока относительно оси, проходящей через его центр масс перпендикулярно плоскости блока. Если блок 4 является однородным диском, то  Так как
Так как  и, следовательно,
и, следовательно, 
Кинетическая энергия груза 5, совершающего поступательное движение,равна
где  — масса груза 5,
— масса груза 5,  — его скорость.
— его скорость.
Кинетическая энергия блока 3, совершающего вращательное движение,равна
где — угловая скорость блока 3,
 — момент инерции блока относительно оси, проходящей через его центр масс перпендикулярно плоскости блока. Так как блок 3 является ступенчатым, и для него заданы масса
— момент инерции блока относительно оси, проходящей через его центр масс перпендикулярно плоскости блока. Так как блок 3 является ступенчатым, и для него заданы масса  и радиус инерции
и радиус инерции  то его момент инерции вычисляется по формуле:
то его момент инерции вычисляется по формуле:

Кинетическая энергия подвижного блока 2, совершающего плоское (сложное) движение, равна
где  — масса подвижного блока 2,
— масса подвижного блока 2,
 — скорость его центра масс E,
— скорость его центра масс E,
 — угловая скорость подвижного блока 2,
— угловая скорость подвижного блока 2,
— момент инерции блока относительно оси, проходящей через его центр масс Е перпендикулярно плоскости блока. Если блок 2 является однородным диском, то  Так как
Так как  и, следовательно,
и, следовательно, 
Таким образом, с учетом выражений (3)-(9) кинетическую энергию системы можно записать в виде:
Выполняем кинематический расчет системы, т.е. выражаем все входящие в (10) линейные и угловые скорости  через искомую угловую скорость
через искомую угловую скорость 
Каток 1 катится без скольжения по наклонной неподвижной плоскости, следовательно, абсолютная скорость точки  касания катка с плоскостью равна нулю. Поэтому точка является мгновенным центром скоростей катка 1, откуда следует:
касания катка с плоскостью равна нулю. Поэтому точка является мгновенным центром скоростей катка 1, откуда следует:

Первая нить, перекинутая через блок 4, соединяет центр катка с грузом 5. Принимая во внимание, что нить нерастяжима и не скользит по блоку 4, получим

Вторая нить одним концом привязана к грузу 5, а другой ее конец намотан на малый барабан радиуса  ступенчатого блока 3, поэтому
ступенчатого блока 3, поэтому

Из сравнения выражений (11)-(13) получаем:

Третья нить одним концом привязана к неподвижной точке L, а другой се конец, огибая подвижный блок 2, намотан на большой барабан радиуса  ступенчатого блока 3 (см. рис. Д4б). Участок нити BD не скользит по блокам 2 и 3, поэтому
ступенчатого блока 3 (см. рис. Д4б). Участок нити BD не скользит по блокам 2 и 3, поэтому

Подвижный блок 2 совершает плоское движение. Точка  в которой с блока 2 сходит неподвижный участок нити
в которой с блока 2 сходит неподвижный участок нити  является мгновенным центром скоростей для блока 2 (он как бы катится по участку нити ). Отсюда следует:
является мгновенным центром скоростей для блока 2 (он как бы катится по участку нити ). Отсюда следует:

Из сравнения выражений (15) и (16) получаем:
Подставив результаты кинематического расчета (14) и (17) в выражение для кинетической энергии (10), с учетом невесомости блоков 2 и 4 получаем окончательно:

Вычисление работ сил. Укажем на рисунке все внешние силы (активные и реакции связей), действующие на точки системы (последовательно по рисунку рассматривая тела системы, начиная с катка 1): 
 Здесь учтено, что
Здесь учтено, что  Теперь найдем сумму работ всех действующих внешних сил при том перемещении, которое будет иметь система, когда центр
Теперь найдем сумму работ всех действующих внешних сил при том перемещении, которое будет иметь система, когда центр  катка 1 пройдет путь.
катка 1 пройдет путь. 

Отметим в этом выражении равные нулю слагаемые (последовательно по рисунку рассматривая тела системы, начиная с катка 1).
Каток 1.
 так как скорость точки
так как скорость точки  приложения этих сил равна нулю (качение без скольжения). Следует отмстить, что модуль силы трения
приложения этих сил равна нулю (качение без скольжения). Следует отмстить, что модуль силы трения  не равен произведению коэффициента трения на нормальную реакцию. При качении без скольжения сила трения должна лишь удовлетворять неравенству
не равен произведению коэффициента трения на нормальную реакцию. При качении без скольжения сила трения должна лишь удовлетворять неравенству  (определение силы трения при качении рассмотрено в задаче Д5). Работы
(определение силы трения при качении рассмотрено в задаче Д5). Работы  будут вычислены ниже.
будут вычислены ниже.
Блок 4.
 так как реакция
так как реакция  приложена к точке, лежащей на неподвижной оси блока 4.
приложена к точке, лежащей на неподвижной оси блока 4.
Груз 5.
 так как силы перпендикулярны скоростям точек, в которых они приложены. Работа
так как силы перпендикулярны скоростям точек, в которых они приложены. Работа  будет вычислена ниже.
будет вычислена ниже.
Шкив 3.
 так как силы приложены к точке, лежащей на неподвижной оси блока 3. Работа А(М) будет вычислена ниже.
так как силы приложены к точке, лежащей на неподвижной оси блока 3. Работа А(М) будет вычислена ниже.
Подвижный блок 2.
 так как скорость точки
так как скорость точки  приложения реакция
приложения реакция  равна нулю (блок 2 катится без скольжения по неподвижной части нити, подобно тому, как каток 1 катится по неподвижной плоскости). Работа
равна нулю (блок 2 катится без скольжения по неподвижной части нити, подобно тому, как каток 1 катится по неподвижной плоскости). Работа  будет вычислена ниже.
будет вычислена ниже.
Таким образом, сумма работ всех действующих внешних сил

Вычислим каждое из этих слагаемых (последовательно по рисунку рассматривая тела системы, начиная с катка 1). Каток 1.
Вычислим  Так как сила
Так как сила  зависит от переменной s, то работа силы на конечном перемещении определяется выражением:
зависит от переменной s, то работа силы на конечном перемещении определяется выражением:
Сила совпадает по направлению со скоростью  центра катка 1,
центра катка 1,
 тогда
тогда
Вычислим  Сила тяжести
Сила тяжести  постоянна и образует со скоростью
постоянна и образует со скоростью  угол 30 . Работа силы
угол 30 . Работа силы 

Груз 5.
Вычислим работу  Сначала найдем величину
Сначала найдем величину  силы трения. Она определяется аналогично тому, как это было сделано в задаче Д1. Выделим из системы груз 5. На него действуют силы:
силы трения. Она определяется аналогично тому, как это было сделано в задаче Д1. Выделим из системы груз 5. На него действуют силы:  суммарная реакция левой и правой частей нити. Уравнение движения груза 5 имеет вид:
суммарная реакция левой и правой частей нити. Уравнение движения груза 5 имеет вид:

где  — ускорение груза 5, совпадающее по направлению с его скоростью
— ускорение груза 5, совпадающее по направлению с его скоростью  Спроектируем это уравнение на ось у, перпендикулярную направлению движения груза 5 (см. рис. Д1 и решения задачи Д1):
Спроектируем это уравнение на ось у, перпендикулярную направлению движения груза 5 (см. рис. Д1 и решения задачи Д1):

Так как  В случае движения груза по наклонной плоскости следует ось у выбрать перпендикулярно плоскости движения груза. Сила трения
В случае движения груза по наклонной плоскости следует ось у выбрать перпендикулярно плоскости движения груза. Сила трения  направлена противоположно скорости груза
направлена противоположно скорости груза
 поэтому работа силы трения отрицательна:
поэтому работа силы трения отрицательна:

Шкив 3.
Вычислим работу А(М). Момент сопротивления М направлен
противоположно направлению вращения блока, поэтому его работа отрицательна:
Подвижный блок 2.
Вычислим работу  Работа силы упругости пружины
Работа силы упругости пружины  равна:
равна:
где с — жесткость пружины,  — начальное и конечное удлинения пружины.
— начальное и конечное удлинения пружины.
Но условию задачи начальная деформация пружины отсутствует,  Конечное удлинение пружины равно перемещению
Конечное удлинение пружины равно перемещению  конца пружины Е, совпадающего с центром блока 2, тогда:
конца пружины Е, совпадающего с центром блока 2, тогда:
Таким образом, сумма работ внешних сил, действующих па точки системы, равна:

Так как зависимость между линейными и угловыми перемещениями такая же, как между соответствующими скоростями, с помощью результатов кинематического расчета (14) и (17) выразим входящие в выражение (24) перемещения  и угол поворота
и угол поворота  через перемещение
через перемещение 
Подставляя эти соотношения в (24), выразим сумму работ внешних сил через заданное перемещение тела 1:

Подставив выражения кинетической энергии (18) и и суммы работ внешних сил (25) в уравнение (1) и учитывая, что  приходим к равенству:
приходим к равенству:
Подставляя в это равенство числовые значения, которые имеют заданные величины, находим искомую угловую скорость 
Ответ: 
Динамика плоскопараллельного движении твердого тела (краткие сведении из теории)
Плоскопараллельное движение твердого тела — это составное движение. Выбирая за полюс центр масс  тела, раскладываем плоскопараллельное движение на переносное поступательное, при котором все точки движутся как полюс , и относительное вращательное вокруг оси
тела, раскладываем плоскопараллельное движение на переносное поступательное, при котором все точки движутся как полюс , и относительное вращательное вокруг оси  , проходящей через перпендикулярно плоскости сечения тела.
, проходящей через перпендикулярно плоскости сечения тела.
Дифференциальные уравнения плоскопараллельного движения твердого тела представляют собой систему уравнений: уравнение (1) движения центра масс и уравнение (2) вращательного движения твердого тела вокруг оси , проходящей через центр масс тела и движущейся поступательно вместе с центром масс. Поэтому второе уравнение совпадает с уравнением вращательного движения тела вокруг неподвижной оси.
Проектируя векторное уравнение (1) на взаимно перпендикулярные оси  и
и  , параллельные плоскости сечения тела, получим уравнения движения тела в координатной (алгебраической форме):
, параллельные плоскости сечения тела, получим уравнения движения тела в координатной (алгебраической форме):
Эти уравнения обычно дополняются кинематическими уравнениями, дающими, в частности, соотношение между угловым ускорением с тела и ускорением  центра масс тела. Решая эту полученную систему динамических и кинематических уравнений, можно находить как ускорения, так и силы, в зависимости от условий и вопросов задачи (первая и вторая задачи динамики).
центра масс тела. Решая эту полученную систему динамических и кинематических уравнений, можно находить как ускорения, так и силы, в зависимости от условий и вопросов задачи (первая и вторая задачи динамики).
Задача №Д5
Барабан (сплошной однородный цилиндр) радиуса  и весом
и весом  начинает катиться без скольжения из состояния покоя по наклонной плоскости с углом наклона
начинает катиться без скольжения из состояния покоя по наклонной плоскости с углом наклона  , на барабан действуют сила
, на барабан действуют сила  , направление которой определяется углом
, направление которой определяется углом  , и пара сил с моментом
, и пара сил с моментом  (рис. Д5).
(рис. Д5).
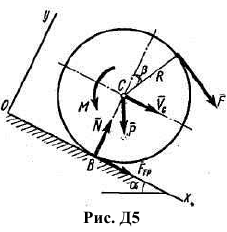
Дано:


Определить:
 — закон движения центра масс барабана;
— закон движения центра масс барабана; — наименьший коэффициент трения, при котором возможно качение без скольжения.
— наименьший коэффициент трения, при котором возможно качение без скольжения.
Решение:
Барабан совершает плоскопараллельное движение под действием сил  и пары сил, момент которой равен
и пары сил, момент которой равен  . Так как направление силы трения
. Так как направление силы трения  заранее неизвестно, выбираем его произвольно. Ось проводим вдоль наклонной плоскости вниз, ось проводим перпендикулярно наклонной плоскости так, чтобы начальное положение центра масс находилось на оси .
заранее неизвестно, выбираем его произвольно. Ось проводим вдоль наклонной плоскости вниз, ось проводим перпендикулярно наклонной плоскости так, чтобы начальное положение центра масс находилось на оси .
Составляем дифференциальные уравнения плоскопараллельного движения барабана:
дифференциальное уравнение движения центра масс в векторной форме:

дифференциальные уравнения движения центра масс в проекциях на оси:

дифференциальное уравнение вращательного движения барабана относительно подвижной оси , проходящей через центр масс и движущейся поступательно вместе с центром масс барабана:

За положительное направление для моментов сил принято направление в ту сторону, куда будет вращаться барабан при движении центра от оси  .
.
В систему уравнений (1)-(3) входят пять неизвестных:  .
.
Дополним эту систему двумя кинематическими уравнениями; для этого выполним кинематические расчеты. Так как в задаче  , то
, то

Далее установим соотношение между  и
и  . Барабан катится без скольжения по неподвижной плоскости, поэтому
. Барабан катится без скольжения по неподвижной плоскости, поэтому  (см. рис. Д5), следовательно, точка
(см. рис. Д5), следовательно, точка  является мгновенным центром скоростей барабана. Тогда
является мгновенным центром скоростей барабана. Тогда

Подставляя кинематические уравнения (4), (5) в систему (1)-(3) и разделив уравнение (3) на  получим
получим
В уравнениях (6)-(8) остались три неизвестные  .
.
1) Определяем закона движения центра масс  .
.
Сначала найдем  . Для этого сложим почленно равенства (6) и (8), тем самым исключив неизвестную
. Для этого сложим почленно равенства (6) и (8), тем самым исключив неизвестную  :
:

Подставляя численные значения, найдем

Интегрируя уравнение (9), получим
Начальные условия:  (так как движение начинается из состояния покоя),
(так как движение начинается из состояния покоя),  (так как ось
(так как ось  проходит через начальное положение точки
проходит через начальное положение точки  ). Подставляя эти начальные условия в (10) и (11), получим:
). Подставляя эти начальные условия в (10) и (11), получим:  ,
,  . Окончательно находим следующий закон движения центра масс :
. Окончательно находим следующий закон движения центра масс :
2) Определение минимального коэффициента трения  , при котором возможно качение барабана без скольжения.
, при котором возможно качение барабана без скольжения.
Сила трения должна удовлетворять условию

Найдем нормальную реакцию  из уравнения (7):
из уравнения (7):

Значение  проще всего найти из уравнения (8), заменив в нем
проще всего найти из уравнения (8), заменив в нем  его значением (9). Получим
его значением (9). Получим
Отсюда

Знак указывает, что направление силы  противоположно показанному на рисунке. Подставляя модуль значения из (14) и значение из (13) в неравенство (12), получим
противоположно показанному на рисунке. Подставляя модуль значения из (14) и значение из (13) в неравенство (12), получим
откуда находим, что

Следовательно, наименьший коэффициент трения, при котором возможно качение барабана без скольжения, равен
Ответ: 
Принцип Даламбера для точки и системы (краткие сведения из теории)
Принцип Даламбера для точки. Рассмотрим дифференциальное уравнение движения точки в инерциальной системе отсчета в векторной форме:

где  — векторная сумма всех сил, действующих на точку (активных и реакций связей). Перенесем вектор
— векторная сумма всех сил, действующих на точку (активных и реакций связей). Перенесем вектор  в правую часть уравнения (1):
в правую часть уравнения (1):  ; обозначим
; обозначим  ; тогда получим уравнение
; тогда получим уравнение

где

эта величина называется силой инерции точки.
Уравнение (2) по форме соответствует уравнению равновесия сил в векторной форме. В этом и состоит принцип Даламбера для точки: если к приложенным к точке силам добавить силу инерции (3), то полученная система сил (активных, реакций связей и сил инерции) будет уравновешенной и задачу динамики можно решать, применив методы статики.
Такой метод решения задач динамики называется методом кинетостатики.
Сила инерции точки  (см. (3)). Модуль силы инерции точки равен
(см. (3)). Модуль силы инерции точки равен  ; направлена сила инерции
; направлена сила инерции  в сторону, противоположную абсолютному ускорению точки
в сторону, противоположную абсолютному ускорению точки  . Поэтому для построения на рисунке следует сначала построить вектор (или его составляющие, например,
. Поэтому для построения на рисунке следует сначала построить вектор (или его составляющие, например,  и
и  ), и затем построить в сторону, противоположную вектору (или
), и затем построить в сторону, противоположную вектору (или  и
и  в стороны, противоположные и , соответственно).
в стороны, противоположные и , соответственно).
Принцип Даламбера для системы. Применим описанный выше принцип Даламбера к каждой точке системы. К силам, действующим на каждую точку (внешним и внутренним), добавляется сила инерции (3). Получаем систему сил (внешних, внутренних и сил инерции) для всех точек системы.
Из раздела «Статика» известно, что система сил в общем случае приводится к главному вектору, приложенному в центре приведения и к паре сил, момент которой равен главному моменту системы сил относительно центра приведения. Можно разбить все силы на группы — внешние, внутренние, и силы инерции — и найти главный вектор и главный момент для каждой группы сил отдельно. Так как главный вектор и главный момент внутренних сил равны нулю, то в уравнениях равновесия сил останутся только внешние силы (активные и реакции связей) и силы инерции.
Принцип Даламбера для системы формулируется следующим образом: если к внешним силам (активным и реакциям связей), действующим на каждую точку системы, добавить силу инерции (3), то полученная система сил будет уравновешенной и для псе справедливы уравнения статики.
Уравнения равновесия сил (внешних (активных и реакций связей) и сил инерции) в векторной форме:
где  — главный вектор и главный момент относительно произвольного центра
— главный вектор и главный момент относительно произвольного центра  внешних сил (активных и реакций связей);
внешних сил (активных и реакций связей);  — главный вектор и главный момент относительно произвольного центра сил инерции. В алгебраической (координатной) форме уравнения равновесия записываются различным образом, в зависимости от типа получившейся системы сил (произвольная система сил, плоская система сил и т. д., см. раздел «Статика»).
— главный вектор и главный момент относительно произвольного центра сил инерции. В алгебраической (координатной) форме уравнения равновесия записываются различным образом, в зависимости от типа получившейся системы сил (произвольная система сил, плоская система сил и т. д., см. раздел «Статика»).
Главный вектор сил инерции не зависит от центра приведения и может быть вычислен заранее:

где  — масса тела (системы),
— масса тела (системы),  — абсолютное ускорение центра масс тела (системы). Главный вектор не обязательно приложен в центре масс (так как центр приведения — произвольная точка).
— абсолютное ускорение центра масс тела (системы). Главный вектор не обязательно приложен в центре масс (так как центр приведения — произвольная точка).
Главный момент сил инерции относительно центра приведения :

Главный момент зависит от центра приведения и заранее может быть вычислен только в некоторых частных случаях (для некоторых видов движения тела и различных центров приведения).
Задача №Д6
С невесомым валом  , вращающимся с постоянной угловой скоростью
, вращающимся с постоянной угловой скоростью  , жестко скреплен однородный стержень
, жестко скреплен однородный стержень  длиной
длиной  и массой
и массой  имеющий на конце груз массой
имеющий на конце груз массой  (рис. Д6).
(рис. Д6).
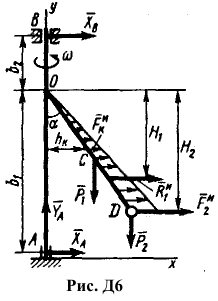
Дано:


Определить: реакции подпятника  и подшипника
и подшипника  .
.
Решение:
Для определения искомых реакций рассмотрим движение механической системы, состоящей из вала  , стержня
, стержня  и груза, и применим принцип Даламбера. Проведем неподвижные оси
и груза, и применим принцип Даламбера. Проведем неподвижные оси  , лежащие в данный момент времени в плоскости, образуемой валом и стержнем, и изобразим действующие на систему внешние силы: силы тяжести
, лежащие в данный момент времени в плоскости, образуемой валом и стержнем, и изобразим действующие на систему внешние силы: силы тяжести  , составляющие
, составляющие  реакции подпятника и реакцию
реакции подпятника и реакцию  подшипника (
подшипника ( надо определить).
надо определить).
Согласно принципу Даламбера, присоединим к этим силам силы инерции точек стержня и груза, считая груз материальной точкой. Так как вал вращается равномерно  , то точки стержня имеют только нормальные ускорения
, то точки стержня имеют только нормальные ускорения  направленные к оси вращения; численно
направленные к оси вращения; численно  где
где  — расстояние от точки от оси. Тогда силы инерции
— расстояние от точки от оси. Тогда силы инерции  будут направлены от оси вращения; численно
будут направлены от оси вращения; численно  , где
, где  — масса точки. Поскольку пропорциональны , то эпюра этих параллельных сил образует треугольник и их можно заменить равнодействующей
— масса точки. Поскольку пропорциональны , то эпюра этих параллельных сил образует треугольник и их можно заменить равнодействующей  , линия действия которой проходит через центр тяжести этого треугольника (точку пересечения медиан), т.е. на расстоянии
, линия действия которой проходит через центр тяжести этого треугольника (точку пересечения медиан), т.е. на расстоянии  , от вершины
, от вершины  , где
, где  (см. рис. Д6).
(см. рис. Д6).
Известно, что равнодействующая любой системы сил равна се главному вектору; численно главный вектор сил инерции стержня  , где
, где  ускорение центра масс стержня. Так как стержень вращается с постоянной угловой скоростью, то ускорение центра масс стержня имеет только нормальную составляющую:
ускорение центра масс стержня. Так как стержень вращается с постоянной угловой скоростью, то ускорение центра масс стержня имеет только нормальную составляющую:  . В результате получим
. В результате получим  .
.
Аналогично для силы инерции  груза найдем, что она направлена от оси вращения; численно
груза найдем, что она направлена от оси вращения; численно  .
.
Так как все действующие силы и силы инерции лежат в плоскости  , то и реакции подпятника
, то и реакции подпятника  и подшипника
и подшипника  тоже лежат в этой плоскости, что было учтено при их изображении на рисунке.
тоже лежат в этой плоскости, что было учтено при их изображении на рисунке.
По принципу Даламбера, приложенные внешние силы и силы инерции образуют уравновешенную систему сил. Составляя для этой плоской системы сил три уравнения равновесия, получим:
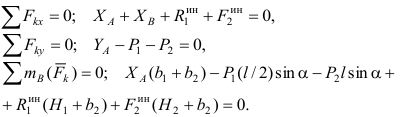
Подставив сюда числовые значения всех заданных и вычисленных величин и решив эту систему уравнений, найдем искомые реакции (в своей задаче решение уравнений равновесия должно быть выполнено подробно).
Ответ: 
Знаки указывают, что силы  и
и  направлены противоположно показанным на рис. Д6.
направлены противоположно показанным на рис. Д6.
Принцип возможных перемещений
(краткие сведении из теории)
Возможным перемещением механической системы называется совокупность
- а) бесконечно малых
- б) мысленных перемещений точек системы, при которых
- в) не нарушаются связи, наложенные на систему.
Возможное перемещение любой точки системы будем изображать элементарным вектором  , направленным в сторону перемещения.
, направленным в сторону перемещения.
Число степеней свободы. Число независимых перемещений точек системы называется числом степеней свободы системы. Если система состоит из  точек, на которые наложены
точек, на которые наложены  геометрических (не накладывающих ограничений на скорости точек) связей, то она имеет
геометрических (не накладывающих ограничений на скорости точек) связей, то она имеет  степеней свободы. В дальнейшем связи считаются геометрическими. Следовательно, чтобы задать положение такой системы в любой момент времени, не нужно задавать все координаты всех точек, а надо задать только независимые параметры.
степеней свободы. В дальнейшем связи считаются геометрическими. Следовательно, чтобы задать положение такой системы в любой момент времени, не нужно задавать все координаты всех точек, а надо задать только независимые параметры.
Независимые параметры, число которых равно числу степеней свободы, и которые однозначно определяют положение всей системы в любой момент времени, называются обобщенными координатами и обозначаются

где  — число степеней свободы. В качестве обобщенных координат можно выбрать декартовы координаты точек, углы поворота тел и т.д.
— число степеней свободы. В качестве обобщенных координат можно выбрать декартовы координаты точек, углы поворота тел и т.д.
Идеальные связи. Связи называются идеальными, если сумма элементарных работ реакций связей, наложенных на систему, равна нулю на любом возможном перемещении системы:

(Элементарная работа на возможном перемещении обозначается  ). Все встречавшиеся ранее связи (шарниры, поверхности, нити, подшипники и т.д.) идеальные при отсутствии трения. Если трение имеется и работа силы трения отлична от нуля, то сила трения включается в число активных сил.
). Все встречавшиеся ранее связи (шарниры, поверхности, нити, подшипники и т.д.) идеальные при отсутствии трения. Если трение имеется и работа силы трения отлична от нуля, то сила трения включается в число активных сил.
Принцип возможных перемещений. Формулировка: для равновесия системы с геометрическими идеальными связями необходимо и достаточно, чтобы сумма элементарных работ всех активных сил, действующих на точки системы, на любом возможном перемещении системы из данного положения была равна нулю:

или (с учетом выражений для элементарной работы силы, см. задачу Д4)

а также

В (2) выполнено деление на  и поэтому суммируются мощности сил.
и поэтому суммируются мощности сил.
Задача №Д7
Механизм (рис. Д7а), расположенный в горизонтальной плоскости, состоит из стержней 1, 2, 3 и ползунов  соединенных друг с другом и с неподвижной опорой
соединенных друг с другом и с неподвижной опорой  шарнирами. К ползуну
шарнирами. К ползуну  прикреплена пружина с коэффициентом жесткости
прикреплена пружина с коэффициентом жесткости  , к ползуну
, к ползуну  приложена сила
приложена сила  , а к стержню 1 (кривошипу) — пара сил с моментом
, а к стержню 1 (кривошипу) — пара сил с моментом  .
.
Дано:


Определить: деформацию  пружины при равновесии механизма.
пружины при равновесии механизма.
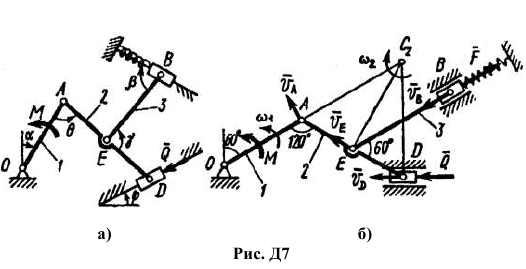
Решение:
- Строим положение механизма в соответствии с заданными углами (рис. Д7б); при этом, согласно указанию к задаче Д7, прикрепляем пружину к ползуну с другой стороны (так, как если бы было
 ).
).
Система состоит из стержней 1, 2, 3 и ползунов система имеет одну степень свободы.
Применим принцип возможных перемещений:

или

(так как в задаче К4 мы уже встречались с определением скоростей точек плоского механизма).
- Покажем на рисунке действующие на точки механизма активные силы: силу , силу упругости
 пружины (предполагая, что пружина растянута) и пару с моментом .
пружины (предполагая, что пружина растянута) и пару с моментом .
Неизвестную силу  найдем с помощью уравнения (1), а зная и учитывая, что
найдем с помощью уравнения (1), а зная и учитывая, что  , определим .
, определим .
- Сообщим системе возможное перемещение. При этом стержень 1 приобретет угловую скорость
 , ползун
, ползун  — скорость
— скорость  , ползун
, ползун  — скорость
— скорость  ; эти скорости потребуются при вычислении слагаемых в (1). Так как система имеет одну степень свободы, то и можно выразить через . Ход расчетов такой же, как в задаче К4.
; эти скорости потребуются при вычислении слагаемых в (1). Так как система имеет одну степень свободы, то и можно выразить через . Ход расчетов такой же, как в задаче К4. - Кинематическая часть задачи. Все вычисления и построения векторов проводятся для заданного положения механизма (механизм не перемещается в новое положение), так как возможные перемещения — бесконечно малые.
Сначала найдем и изобразим на рисунке скорость точки  (направление вектора скорости
(направление вектора скорости  определяется направлением угловой скорости ):
определяется направлением угловой скорости ):

Определим и изобразим на рисунке скорость точки . Скорость вдоль направляющих ползуна . Но теореме о проекциях скоростей точек абсолютно твердого тела, проекции скоростей и на прямую  алгебраически равны (имеют одинаковые модули и знаки):
алгебраически равны (имеют одинаковые модули и знаки):

Чтобы определить скорость точки  , найдем сначала скорость точки
, найдем сначала скорость точки  . Для этого построим мгновенный центр скоростей
. Для этого построим мгновенный центр скоростей  стержня 2. Он находится на пересечении перпендикуляров к векторам и , восставленных из точек и . Покажем направление мгновенного поворота стержня 2 (вокруг ), учитывая направление или . Так как
стержня 2. Он находится на пересечении перпендикуляров к векторам и , восставленных из точек и . Покажем направление мгновенного поворота стержня 2 (вокруг ), учитывая направление или . Так как  , то
, то  равносторонний и
равносторонний и  в нем высота, поскольку
в нем высота, поскольку  . Тогда скорость
. Тогда скорость  , перпендикулярная , будет направлена по прямой
, перпендикулярная , будет направлена по прямой  (при изображении учитываем направление мгновенного поворота стержня 2).
(при изображении учитываем направление мгновенного поворота стержня 2).
Воспользовавшись опять теоремой о проекциях скоростей точек и на прямую , получим

Значение скорости  можно найти и другим способом, составив пропорцию
можно найти и другим способом, составив пропорцию
Находим  , применив еще раз теорему о проекциях скоростей и на прямую
, применив еще раз теорему о проекциях скоростей и на прямую  и учитывая, что параллельна направляющим ползуна .
и учитывая, что параллельна направляющим ползуна .

Изображаем на рисунке.
Составим уравнение (1) для показанных на рисунке сил и скоростей. Мощность силы 
Мощность силы 
Мощность пары сил:  так как элементарная работа пары (см. задачу Д4)
так как элементарная работа пары (см. задачу Д4)  , а мощность равна
, а мощность равна  . В итоге, уравнение (1) принимает вид
. В итоге, уравнение (1) принимает вид

Заменяя здесь  и их значениями (2) и (3) и вынося
и их значениями (2) и (3) и вынося  за скобки, получаем
за скобки, получаем

Так как равенство (4) выполняется при любой возможной угловой скорости , то

Из уравнения (5) находим значение силы упругости  и определяем деформацию пружины
и определяем деформацию пружины  .
.
Ответ:  . Знак указывает, что пружина, как и предполагалось, растянута.
. Знак указывает, что пружина, как и предполагалось, растянута.
Уравнения Лагранжа
(краткие сведении из теории)
Механические системы могут иметь различное число степеней свободы (числом  степеней свободы называется число независимых перемещений точек системы). Независимые параметры
степеней свободы называется число независимых перемещений точек системы). Независимые параметры  однозначно определяющие положение механической системы в пространстве, называются обобщенными координатами механической системы (см. задачу Д7). Производные по времени от обобщенных координат
однозначно определяющие положение механической системы в пространстве, называются обобщенными координатами механической системы (см. задачу Д7). Производные по времени от обобщенных координат  называются обобщенными скоростями. В качестве обобщенной координаты обычно выбирается либо координата тела, движущегося поступательно (тогда обобщенной скоростью будет скорость
называются обобщенными скоростями. В качестве обобщенной координаты обычно выбирается либо координата тела, движущегося поступательно (тогда обобщенной скоростью будет скорость  этого тела), либо угол поворота вращающегося тела (тогда обобщенной скоростью будет угловая скорость со этого тела).
этого тела), либо угол поворота вращающегося тела (тогда обобщенной скоростью будет угловая скорость со этого тела).
Таким образом, размерности обобщенных координат могут быть различными.
Кинетическая энергия  системы может быть выражена через обобщенные скорости и обобщенные координаты:
системы может быть выражена через обобщенные скорости и обобщенные координаты:

Бесконечно малые изменения  обобщенных координат на (бесконечно малом) возможном перемещении системы называются вариациями обобщенных координат. Обычно системе сообщают возможные перемещения в сторону возрастания
обобщенных координат на (бесконечно малом) возможном перемещении системы называются вариациями обобщенных координат. Обычно системе сообщают возможные перемещения в сторону возрастания  , так что
, так что  .
.
Обобщенные силы. Пусть на систему действуют различные активные силы. Придадим системе такое возможное перемещение, при котором меняется только  то есть
то есть  a
a  . Вычислим сумму элементарных работ всех активных сил
. Вычислим сумму элементарных работ всех активных сил  на этом возможном перемещении. Далее выразим возможные перемещения
на этом возможном перемещении. Далее выразим возможные перемещения  точек приложения сил через
точек приложения сил через  . Тогда в появится общий множитель : вынесем его за скобки, обозначив оставшееся в скобках выражение через
. Тогда в появится общий множитель : вынесем его за скобки, обозначив оставшееся в скобках выражение через  :
:
Величина называется обобщенной силой, соответствующей обобщенной координате . Аналогично определяются обобщенные силы, соответствующие остальным обобщенным координатам. Размерность обобщенной силы зависит от размерности обобщенной координаты.
Уравнения Лагранжа справедливы для системы с геометрическими идеальными связями и имеют вид
Число уравнений равно числу степеней свободы. Чтобы составить уравнение Лагранжа для механической системы с одной степенью свободы, следует а) найти кинетическую энергию  системы и выразить ее через обобщенную скорость и обобщенную координату:
системы и выразить ее через обобщенную скорость и обобщенную координату:  ; б) последовательно вычислить производные
; б) последовательно вычислить производные  в) вычислить
в) вычислить  и, представив эту сумму в виде
и, представив эту сумму в виде  , найти обобщенную силу
, найти обобщенную силу  ; г) подставить производные в левую часть уравнения (1), а обобщенную силу — в правую часть. В итоге получится дифференциальное уравнение движения системы (относительно функции
; г) подставить производные в левую часть уравнения (1), а обобщенную силу — в правую часть. В итоге получится дифференциальное уравнение движения системы (относительно функции  ). Аналогично составляется каждое из уравнений (1) для механической системы с произвольным числом степеней свободы.
). Аналогично составляется каждое из уравнений (1) для механической системы с произвольным числом степеней свободы.
Задача №Д8
Механическая система состоит из ступенчатого шкива 2 (радиусы ступеней  и
и  ), груза 1 и сплошного катка 3, прикрепленных к концам нитей, намотанных на ступени шкива (рис. Д8). На шкив при его вращении действует момент сил сопротивления
), груза 1 и сплошного катка 3, прикрепленных к концам нитей, намотанных на ступени шкива (рис. Д8). На шкив при его вращении действует момент сил сопротивления  . Массу шкива считать равномерно распределенной по внешнему ободу; шкив катится по плоскости без скольжения. Массами нитей пренебречь.
. Массу шкива считать равномерно распределенной по внешнему ободу; шкив катится по плоскости без скольжения. Массами нитей пренебречь.
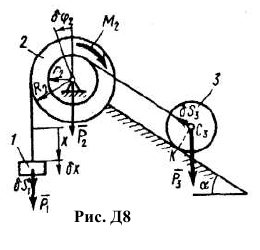
Дано:

Определить:  — ускорение груза 1.
— ускорение груза 1.
Решение:
1. Система состоит из груза 1, шкива 2, катка 3 и нитей; система имеет одну степень свободы. Выберем в качестве обобщенной координаты координату  груза 1, полагая, что груз движется вниз, и отсчитывая в сторону движения;
груза 1, полагая, что груз движется вниз, и отсчитывая в сторону движения;  ; обобщенная скорость
; обобщенная скорость  или
или  . Уравнение Лагранжа, с учетом выбранной обобщенной координаты и соответствующей обобщенной скорости, имеет вид
. Уравнение Лагранжа, с учетом выбранной обобщенной координаты и соответствующей обобщенной скорости, имеет вид
Определим кинетическую энергию системы, равную сумме кинетических энергий всех тел (вычисления здесь аналогичны вычислениям, проводившимся в задаче Д4):
Так как груз 1 движется поступательно, шкив 2 вращается вокруг неподвижной оси, а каток 3 совершает плоскопараллельное движение, то

Поскольку масса шкива считается распределенной по внешнему ободу, а каток — сплошной (его радиус обозначим  ), то
), то
Все скорости, входящие в  и
и 
 , выразим через обобщенную скорость
, выразим через обобщенную скорость  . Из рис. Д8 следует, что
. Из рис. Д8 следует, что  то сеть
то сеть

а также

откуда, с учетом (5), получаем

Точка  — мгновенный центр скоростей катка, следовательно,
— мгновенный центр скоростей катка, следовательно,  ; подставляя (6), находим
; подставляя (6), находим

Подставляя (4)-(7) в (3), а затем значения  в (2), получаем
в (2), получаем
или

Вычислим производные, входящие в (1), учитывая (8):
так как не зависит от :
Найдем обобщенную силу  . Активные силы, действующие на систему:
. Активные силы, действующие на систему:  и момент сил сопротивления
и момент сил сопротивления  , направленный против вращения шкива. Сообщим системе возможное перемещение, при котором обобщенная координата
, направленный против вращения шкива. Сообщим системе возможное перемещение, при котором обобщенная координата  получает положительное приращение
получает положительное приращение  , и покажем перемещения каждого из тел; для груза 1 это будет , для шкива 2 поворот на угол
, и покажем перемещения каждого из тел; для груза 1 это будет , для шкива 2 поворот на угол  , для катка 3 — перемещение
, для катка 3 — перемещение  его центра. Эти перемещения указаны на рис. Д8. После этого вычислим сумму элементарных работ сил и момента на данных перемещениях; получим
его центра. Эти перемещения указаны на рис. Д8. После этого вычислим сумму элементарных работ сил и момента на данных перемещениях; получим

Сила  работы не совершает, так как приложена к точке неподвижной оси.
работы не совершает, так как приложена к точке неподвижной оси.
Все входящие в (11) перемещения надо выразить через . Учитывая, что зависимости между элементарными перемещениями аналогичны зависимостям (5), (6) между соответствующими скоростями, получим
Подставляя (12), (13) в (11) и вынося за скобки, найдем

Коэффициент при в полученном выражении и будет обобщенной силой . Следовательно,
или

Подставляя найденные величины (9), (10) и (15) в уравнение (1), получим
Отсюда находим искомое ускорение  .
.
Ответ: 
Примечание 1. Если в ответе получится  (или
(или  ), то это означает, что система движется не в ту сторону, куда было предположено. Тогда у момента
), то это означает, что система движется не в ту сторону, куда было предположено. Тогда у момента  , направленного против вращения шкива, изменится направление и, следовательно, как видно из равенства (14), изменится величина , для которой надо найти новое верное значение.
, направленного против вращения шкива, изменится направление и, следовательно, как видно из равенства (14), изменится величина , для которой надо найти новое верное значение.
Примечание 2. Если требуется найти закон изменения обобщенной координаты (закон движения груза 1), то, учитывая, что  , интегрируем это уравнение и находим
, интегрируем это уравнение и находим  .
.
Малые линейные колебания консервативной системы с одной степенью свободы (краткие сведения из теории)
Рассмотрим консервативную механическую систему с одной степенью свободы. Обобщенную координату обозначим через  . Кинетическая и потенциальная энергии системы:
. Кинетическая и потенциальная энергии системы:

Пусть заранее известно некоторое положение равновесия системы. Будем считать, что в этом положении  (то сеть будем отсчитывать обобщенную координату от положения равновесия); тогда
(то сеть будем отсчитывать обобщенную координату от положения равновесия); тогда  . Если
. Если  , то рассматриваемое положение равновесия устойчиво и около него система может совершать малые линейные колебания. Дифференциальное (линейное) уравнение этих колебаний:
, то рассматриваемое положение равновесия устойчиво и около него система может совершать малые линейные колебания. Дифференциальное (линейное) уравнение этих колебаний:  , где
, где  — круговая частота,
— круговая частота,  — коэффициент жесткости,
— коэффициент жесткости,  — коэффициент инерции. Величина
— коэффициент инерции. Величина  (всегда положительная) находится после приведения кинетической энергии системы к виду
(всегда положительная) находится после приведения кинетической энергии системы к виду  , при этом для выражения скоростей точек и угловых скоростей тел системы через
, при этом для выражения скоростей точек и угловых скоростей тел системы через  следует использовать кинематические соотношения, отвечающие равновесной конфигурации. Величина
следует использовать кинематические соотношения, отвечающие равновесной конфигурации. Величина  находится после приведения потенциальной энергии системы к виду
находится после приведения потенциальной энергии системы к виду

где const — постоянная (не зависящая от ), через (…) обозначены слагаемые третьего и выше порядков малости по (если  , то малые линейные колебания около рассматриваемого положения равновесия невозможны). Так как
, то малые линейные колебания около рассматриваемого положения равновесия невозможны). Так как  , то
, то  ; из этого равенства можно найти какую-либо величину, характеризующую положение равновесия, например, статическую деформацию
; из этого равенства можно найти какую-либо величину, характеризующую положение равновесия, например, статическую деформацию  одной из пружин.
одной из пружин.
Кстати готовые на продажу задачи тут, и там же теория из учебников может быть вам поможет она.
Задача №Д9а
Находящаяся в равновесии механическая система состоит из колеса 1 радиуса  , ступенчатого колеса 2 с радиусами
, ступенчатого колеса 2 с радиусами  и
и  (колеса 1 и 2 считать однородными цилиндрами) и груза 3, подвешенного на нити, намотанной на колесо 2; колеса соединены невесомым стержнем
(колеса 1 и 2 считать однородными цилиндрами) и груза 3, подвешенного на нити, намотанной на колесо 2; колеса соединены невесомым стержнем  (рис. Д9а). К колесу 1 прикреплена вертикальная пружина жесткостью
(рис. Д9а). К колесу 1 прикреплена вертикальная пружина жесткостью  .
.
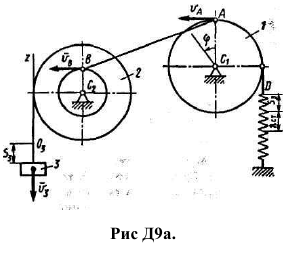
Дано:
Определить: круговую частоту  малых колебаний системы около положения равновесия и значение
малых колебаний системы около положения равновесия и значение  .
.
Решение:
1. Система имеет одну степень свободы. Выберем в качестве обобщенной координаты угол  поворота колеса 1 от равновесного положения (при равновесии
поворота колеса 1 от равновесного положения (при равновесии  и
и  ); при движении системы, рассматривая малые колебания, считаем угол малым.
); при движении системы, рассматривая малые колебания, считаем угол малым.
Определим кинетическую энергию  системы, равную сумме кинетических энергий всех тел:
системы, равную сумме кинетических энергий всех тел:

Так как колеса 1 и 2 вращаются вокруг осей  и
и  , а груз 3 движется поступательно, то
, а груз 3 движется поступательно, то

где
Все скорости, входящие в  и
и  , выразим через обобщенную скорость
, выразим через обобщенную скорость  . Прежде всего,
. Прежде всего,  . Далее, в равновесной конфигурации
. Далее, в равновесной конфигурации  то есть
то есть  , откуда
, откуда  и
и  . Окончательно, учитывая, что
. Окончательно, учитывая, что  , получим
, получим

Подставляя величины (3), где  и (4) в равенства (2), получим из равенства (1)
и (4) в равенства (2), получим из равенства (1)  , где
, где

Определим потенциальную энергию  системы.
системы.
При повороте колеса 1 на угол  пружина получит дополнительную (к
пружина получит дополнительную (к  ) деформацию
) деформацию  . Следовательно,
. Следовательно,  . За нулевой уровень
. За нулевой уровень  выберем уровень, отвечающий равновесной конфигурации. Тогда
выберем уровень, отвечающий равновесной конфигурации. Тогда  . Чтобы выразить
. Чтобы выразить  через
через  , заметим, что зависимость между малыми перемещениями здесь будет такой же, как между соответствующими скоростями; из последнего из равенств (4) тогда находим
, заметим, что зависимость между малыми перемещениями здесь будет такой же, как между соответствующими скоростями; из последнего из равенств (4) тогда находим  . Подставляя все найденные величины в равенство (6), получим
. Подставляя все найденные величины в равенство (6), получим

Из равенства (7) следует, что  ; учитывая (5), найдем
; учитывая (5), найдем

Из равенства (7) также следует, что

откуда

Ответ: 
Задача №Д9б
Находящаяся в равновесии механическая система состоит из однородного стержня 1, ступенчатого колеса 2 с радиусами  и
и  (колесо 2 считать однородным цилиндром), груза 3, подвешенного на нити, перекинутой через невесомый блок 4 и намотанной на колесо 2, и невесомого стержня 5, соединяющего тела 1 и 2 (рис. Д9б). В точке
(колесо 2 считать однородным цилиндром), груза 3, подвешенного на нити, перекинутой через невесомый блок 4 и намотанной на колесо 2, и невесомого стержня 5, соединяющего тела 1 и 2 (рис. Д9б). В точке  — шарнир; в точке
— шарнир; в точке  прикреплена горизонтальная пружина жесткостью
прикреплена горизонтальная пружина жесткостью  .
.
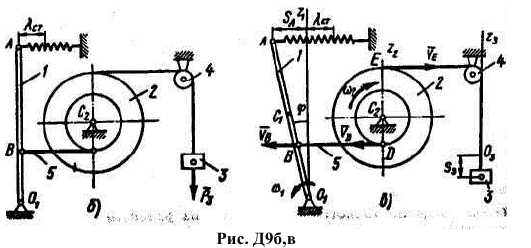
Дано:


Определить: круговую частоту  малых колебаний системы около положения равновесия и значение
малых колебаний системы около положения равновесия и значение  .
.
Решение:
1. Система имеет одну степень свободы. Выберем в качестве обобщенной координаты угол  отклонения стержня от вертикали; при движении системы, рассматривая малые колебания, считаем угол малым.
отклонения стержня от вертикали; при движении системы, рассматривая малые колебания, считаем угол малым.
Определим кинетическую энергию  системы, равную сумме кинетических энергий всех тел:
системы, равную сумме кинетических энергий всех тел:

Так как стержень 1 и колесо 2 вращаются вокруг осей  и
и  соответственно, а груз 3 движется поступательно, то
соответственно, а груз 3 движется поступательно, то

где
Все скорости, входящие в  и
и  , выразим через обобщенную скорость
, выразим через обобщенную скорость  . Прежде всего,
. Прежде всего,  . Далее, в равновесной конфигурации
. Далее, в равновесной конфигурации  . Учитывая это, находим
. Учитывая это, находим  и
и  . Таким образом, окончательно,
. Таким образом, окончательно,

Подставляя величины (3) и (4) в равенства (2), получим из (1)  , где
, где
Определим потенциальную энергию  системы.
системы.

Величины  следует выразить через . В произвольном положении системы (см. рис. Д9в) пружина получит дополнительную деформацию, равную
следует выразить через . В произвольном положении системы (см. рис. Д9в) пружина получит дополнительную деформацию, равную  , причем, ввиду малости , можно считать, что
, причем, ввиду малости , можно считать, что  . Следовательно,
. Следовательно,  . За нулевой уровень
. За нулевой уровень  , выберем уровень шарнира
, выберем уровень шарнира  . Тогда
. Тогда  . Раскладывая
. Раскладывая  в ряд и сохраняя величины до второго порядка малости включительно, получим
в ряд и сохраняя величины до второго порядка малости включительно, получим
(В случае, когда стержень  горизонтален (поверните рис. Д9в на 90 ), будет
горизонтален (поверните рис. Д9в на 90 ), будет  , и нужная точность получится, если считать
, и нужная точность получится, если считать  .) За нулевой уровень
.) За нулевой уровень  выберем уровень шарнира
выберем уровень шарнира  . Тогда
. Тогда  . За нулевой уровень
. За нулевой уровень  выберем уровень, отвечающий равновесной конфигурации. Тогда
выберем уровень, отвечающий равновесной конфигурации. Тогда  . Чтобы выразить
. Чтобы выразить  через , заметим, что зависимость между малыми перемещениями здесь будет такой же, как между соответствующими скоростями; из последнего из равенств (4) тогда находим
через , заметим, что зависимость между малыми перемещениями здесь будет такой же, как между соответствующими скоростями; из последнего из равенств (4) тогда находим  и
и  . Подставляя все найденные величины в равенство (6), получим
. Подставляя все найденные величины в равенство (6), получим
Из равенства (7) следует, что  учитывая (5), найдем
учитывая (5), найдем

Из равенства (7) также следует, что
откуда

Ответ: 
