
Оглавление:

Интегрирование уравнения изгиба
- Интеграл уравнения изгиба. Интеграл уравнения (116.4) посвящен очень большой литературе, но математически задача является фундаментальной. Правая часть уравнения обычно не является аналитической функцией z-координат, и аналитическая формула для моментов изменяется от участка к участку. Поэтому вопрос
определения отклонения может быть очень трудоемким. Каждый участок имеет свои интегральные константы, которые должны определяться из условий объединения. Интегральный метод, описанный ниже, вернется к Эйлеру, это А. Для более сложных уравнений упругого основания стержня и изгиба
балки до вибрации, развиваемой N, интегральное уравнение (116.4) Людмила Фирмаль
дается, в диапазоне от нуля до z, следующим образом: это не проблема. (118.1) От нуля к уравнению Z (118.1) снова. Get; z g v(2) = ® (0)4 — Tg (0)2-1 — ^^f-d z d z. (118.2)эта формула дает общий Интеграл уравнения(116.4)в соответствии с двумя константами: v(0) и®’(0). Для вычисления интеграла по формулам (118.1) и (118.2) необходимо иметь дело со специальной функцией f»(2), которая определяется следующим образом:»(2) = 0 (2 < 0 ), f»(g)= = ^U>°) — (I8. 3) докажите
следующую теорему о функции FP ( ^ ): 5f» (*- b и * =f l+1 (* — «)• (118.4) да. Действительно, если тогда G f „(2-a)=0,$f „(g-a)d2 “ =0= = q>n+1 (2-a)\zа, Дж. Ф. “ (2-а) ДЗ=^-^={^^п+л (я-а) (г>а). * A254 изгибная деформация[гл. Икс Изгибающий момент в обычном случае приложения нагрузки к балке может быть выражен функцией f». Например, балка, нагруженная моментами M в сечении
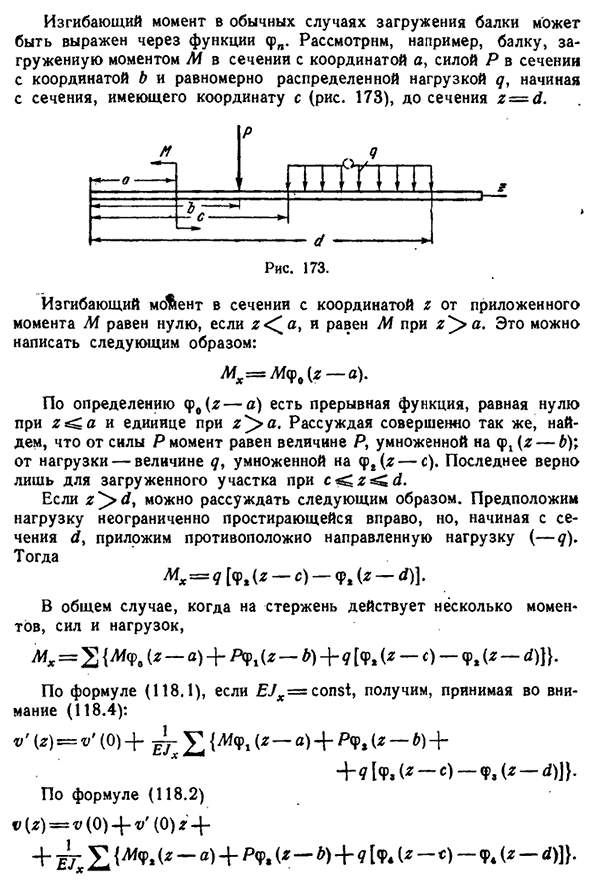
- с координатами a, силой P в сечении с координатами b и силой q, равномерно распределенной в сечении с координатами C 173), в сечении с z—d. П —— О ——— — г Л — * 4г г——————————— ——— и. 1 Рис, 173. Изгибающий момент сечения с координатами z приложенного момента M равен нулю в случае z<^a, а в случае 2^>a равен M.: L4h=L1F V(2-a). Если вывести точно таким же образом, то можно увидеть, что момент от силы P равен значению P, умноженному на f, (z—b). Последнее справедливо только для
нагруженного участка c^z^D. В случае Z — >d можно сделать следующий вывод: предположим, что нагрузка начинается с участка d, продолжаясь бесконечно вправо, и применяем указанную нагрузку (—q) к противоположному участку. Затем -C) — f» ( — <*)] *в общем случае, когда на стержень действуют некоторый момент, сила и нагрузка, MX=2{^f. (— a)+^P i (z-b)+I[f.(— C) — f, (—<)!}. По выражению (118.1), если EJX-const, (118.4):®’(g)=f’(0)+^2^{L4f1 (2-a)4-P f, (2 — (>)+ — N1F, (— C) — f, (— c)*)]}- По уравнению (118.2) v (z)=v (0) v’ (0)2′ -{-+ ^ ^ { a1f, (2-O) 4-R f, ( / — ) 4 -?[Ф4(2-с, Ф4(2-г)]}.§P9]
пример определения отклонения 255 Последний представляет собой общий Людмила Фирмаль
Интеграл уравнения изгиба. Напомним определение функции<p «и запишем формулу для v’и v’а следующим образом:» ’( 2 ) = » ’(0 ) + ++ + ’(118.5) в (З) — в (0)и V’(0)з -}- Значок «l»над знаком суммы указывает, что суммируются только значения, связанные с частью балки, оставленной относительно рассматриваемого участка. При переходе с одного сайта на другой в Формулу добавляется новый элемент. Эти уравнения легко можно распространить на нагрузки, распределенные по законам произвольных степеней треугольника, трапеции и параболы. Предлагаем нашим читателям сделать соответствующие выводы.
Смотрите также:
| Дифференциальное уравнение изогнутой оси | Примеры определения прогибов |
| Пределы применимости приближенной теории | Простейшие статически неопределенные задачи |
