
Оглавление:


Кинематическая точность цилиндрических колёс и передач
- Кинематическая точность зубчатых колес и колес регулируется кинематической точностью с помощью показателей, приведённых в таблице. 2 В зависимости от степени точности. На собранном зубчатом колесе, рисунок 4а, когда ведущее зубчатое колесо повернуто на определенный угол.
Ведущая шестерня r2, которая теоретически учитывает передаточное число, должна вращаться под номинальным углом Па. Однако из-за воздействия В случае различных ошибок ведущие колеса фактически вращаются на угол p2, немного больший или меньший, чем номинальный угол.
Сигнал от датчика подается через электронное реле 8 на сигнальную пластину 9 с трехрядной лампочкой и экраном. Людмила Фирмаль
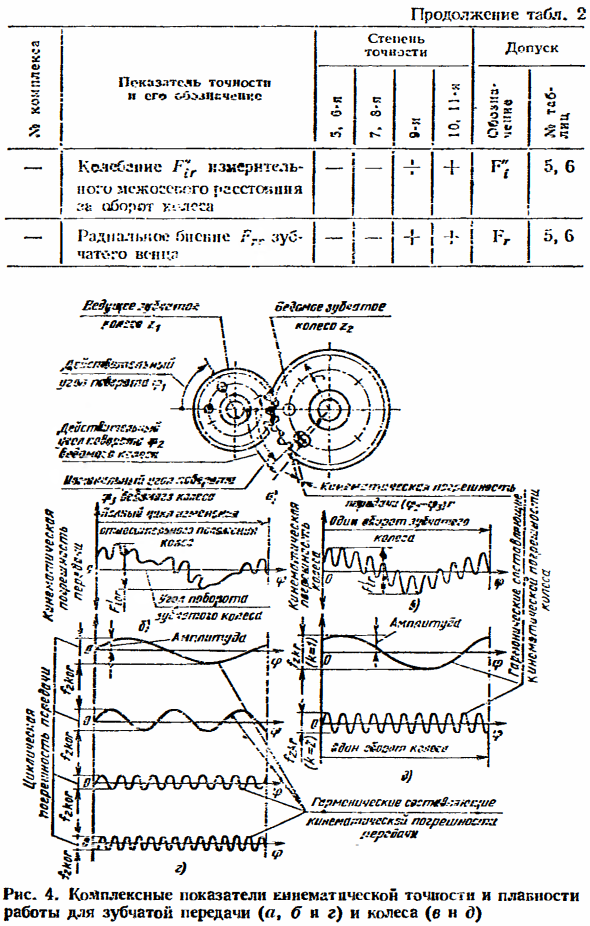
Отображает кинематическую ошибку передачи, равную разнице между фактическим pa и расчётным (номинальным) p3 углом поворота Привод шестерни, выраженный в виде линейной величины (микрометры), длина дуги окружности колеса. Номинальный угол поворота Приводное колесо Здесь r1 и r2 — количество зубьев ведущего колеса и ведомого колеса. Кинематическая ошибка передачи представлена в виде графика (рис. 4, б), а значения ошибки нанесены на вертикальную и горизонтальную оси Горизонтальная ось — угол поворота шестерни p.
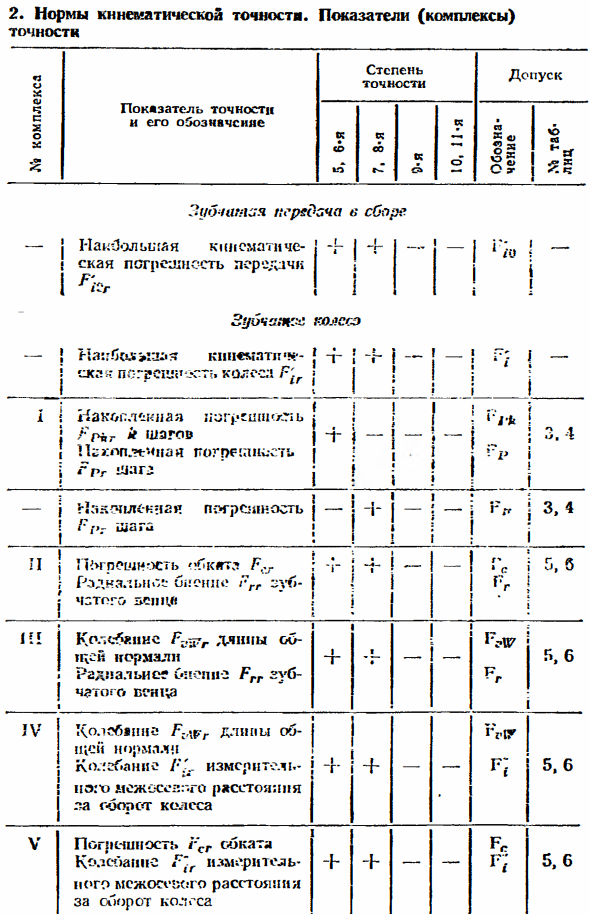
Комплексным показателем кинематической точности является максимальная кинематическая погрешность передачи P Oh- Ошибка передачи движения в полном цикле изменения относительного положения передачи. Эта ошибка ограничена допуском P 1O. 2. Кинематические стандарты точности. Индикатор (комплекс). толерантность Редуктор в сборе Если вы контролируете P 1g, будет отображаться следующий график. Рисунок 4, с. Зачастую кинематическая точность колес третьей-восьмой точности должна определяться двумя показателями, а не одним. В комплексе. Например, комплекс III содержит два точных индикатора, GNR и P.
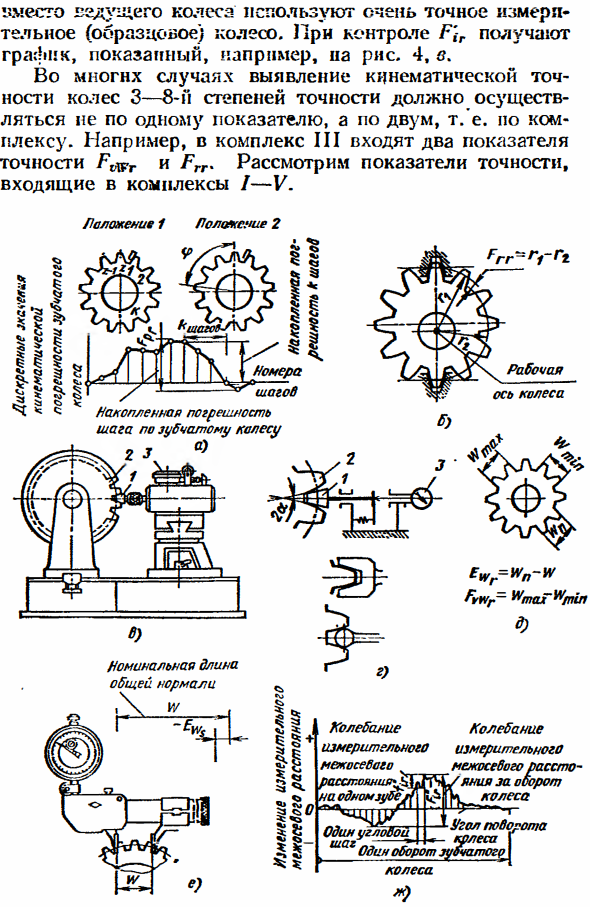
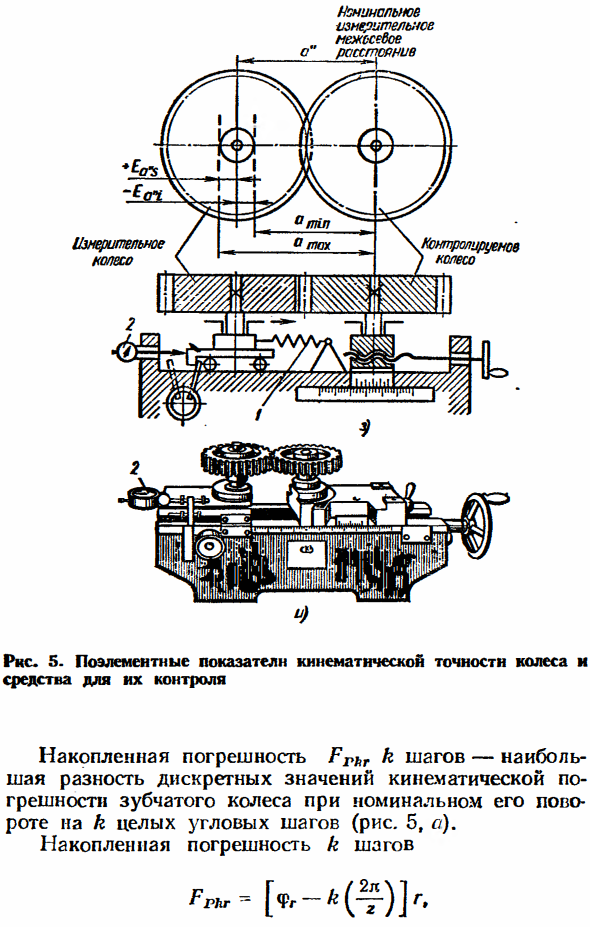
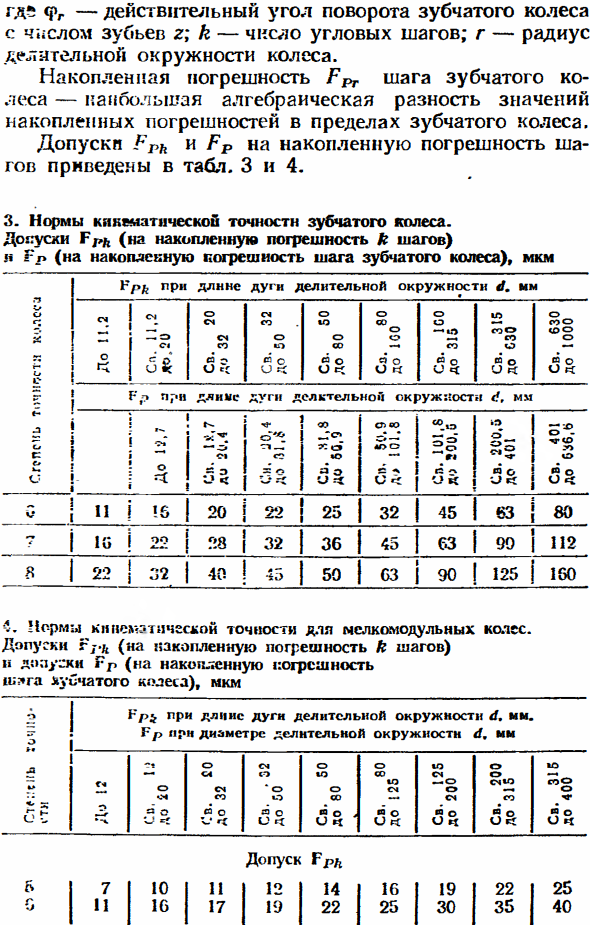
Рассмотрим показатели точности, содержащиеся в комплексах I-V. Рис. 5 Элементный показатель кинематической точности колес и средства его управления Шаг кумулятивной ошибки-Мост Разница между дискретными значениями кинематической погрешности зубчатого колеса при номинальном вращении на k полных угловых шагов (рис. 5, а). Шаг накопленная ошибка гд рг — фактический угол поворота зубчатого колеса с г зубцами. k — количество угловых шагов. g — радиус окружности шага колеса.
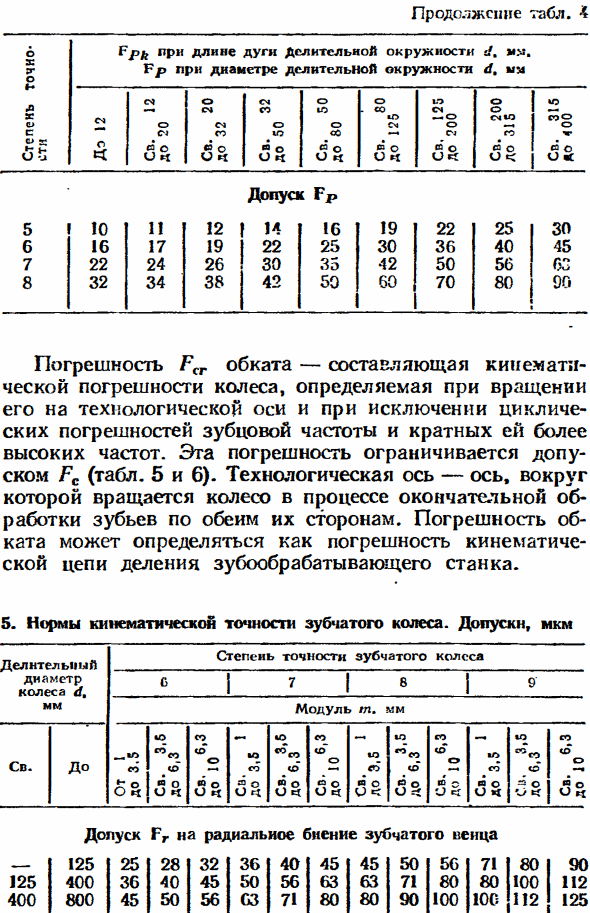
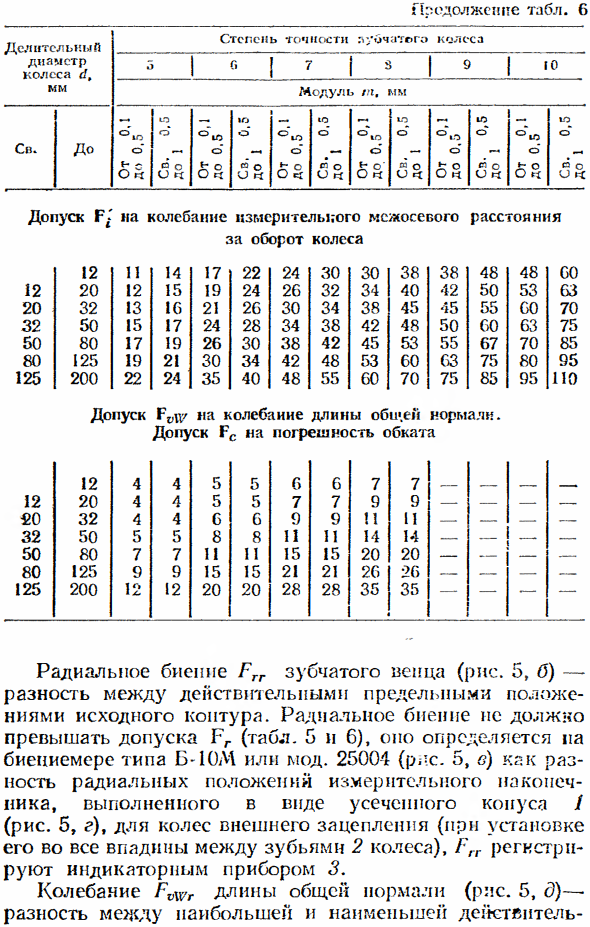
- Кумулятивная ошибка Gr, максимальная алгебраическая разница шага зубчатой передачи кумулятивной величины ошибки в передаче. Колесо. Значения серого и EP для суммарной погрешности приведены в таблице. 3 и 4. 3. Передача кинематической точности. Радиальное биение эргономичного зубчатого колеса (рис. 5, б) — это разница между фактическим предельным положением исходного контура. радиальный Удары не должны превышать допуск Pg (таблицы 5 и 6), должен решать оператор типа B-YM или режим. 25004 (рис. 5, е).
Радиальное положение 1 измерительного наконечника выполнено в виде усеченного конуса 1 (фиг.5, г) для колеса внешнего редуктора (в Установите его во все полости между зубьями двух колес), зарегистрируйте E дисплей 3. Вибрация длины общей нормальной Tc yr (рис. 5, е) — разница между максимальным действительным числом и минимальным действительным числом.
Выбор схемы шарикоподшипниковой системы для автоматического управления и комплектации в сборке показан на рисунке. Людмила Фирмаль
Длина общей нормали одной и той же шестерни. Фактическая длина общей нормали — это расстояние между двумя параллельными линиями Две тангенциальные плоскости отличаются от активной стороны зубьев шестерни. Длина общей нормы измеряется Обычные инструменты типа B B-5045, BV-5046, BV-5081 и BV-5082 мод (рис. 5, е) 2202, 22002 и 22102.
Допустимые значения приведены в таблице. 5 и 6. Вибрация измеренного межосевого расстояния за один оборот шестерни G 1g (рис. 5, г) — разница между максимальным и минимальным Фактическое межосевое расстояние в двух профилях (без зазора) измерительной шестерни и колеса управления Когда последний полностью повернут (рис. 5, а). Значение E g определяется для межсейсмической сборки типа МЦ-160Милн МЦ-400У (рис. 5 а). Есть два типа перевозки, фиксированная и плавающая.
Неподвижная передача прикреплена к неподвижной каретке, и Измерительное колесо постоянно прижимается к колесу управления пружиной 1 (см. Рис. 5, h). При повороте шестерни G1 По отношению друг к другу он изменяет измеренное межосевое расстояние a, записанное считывающим или записывающим устройством 2. Э. R ограничен допуском E (таблицы 5 и 6).
Смотрите также:
Примеры решение задач по допускам и посадкам
| Параметры цилиндрических зубчатых колес | Плавность работы цилиндрических колёс и передач |
| Степени точности цилиндрических зубчатых колес | Нормы контакта зубьев в передаче |
