
Оглавление:

Классификация механизмов
- КЛАССИФИКАЦИЯ МЕХАНИЗМОВ Начиная с конца XVIII столетия, учеными предлагались разные системы классификации механизмов, но ни одна из них не оказала значительного влияния на развитие науки о механизмах. Предлагались системы классификации, основанные на делении механизмов по признаку преобразования движений (например, прямолинейного в криволинейное,
непрерывного в периодическое), по признаку преобразования скоростей, по роду связи между звеньями механизмов и т. д. Во всех таких классификациях не исключалась возможность объединения в одних и тех же группах таких механизмов, которые являются различными по своей структуре и которые не могут быть поэтому исследуемы совместно. В 1916 г. профессор Петербургского политехнического института Л. В. Ассур предложил классификацию, оказавшую значительное влияние на развитие науки о механизмах. Этой классификацией предусматривались механизмы,
в состав которых входят только низшие пары, но в дальнейшем в трудах Людмила Фирмаль
советских ученых классифи* кация Ассура была распространена и на механизмы с высшими парами. * Зависимость между числами звеньев и числами пар в механизмах, не содержащих высших пар, в соответствии с формулой (3) выражается уравнением Зп = 2р + 1. (4) Это уравнение удовлетворяется следующими значениями входящих в него переменных, причем п и р являются целыми числами: п = 2/ 1; | р — 3t + 1 J при любом целом числе / > 0. 2 Зиновьев 612 (5)18 Структурный анализ плоских механизмов Давая независимому
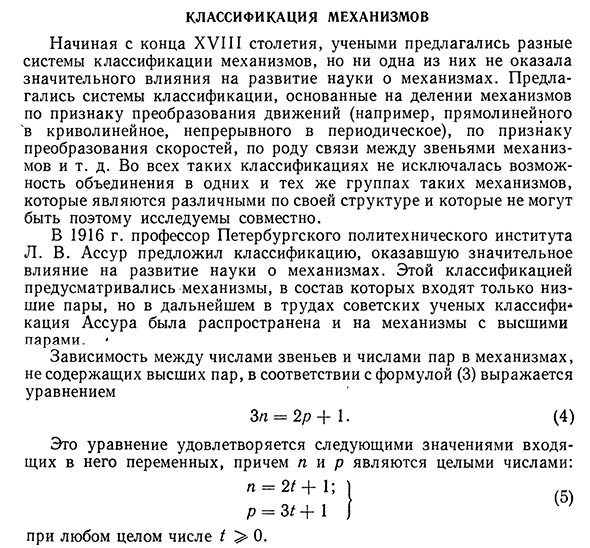
переменному t постепенно возрастающие значения, начиная с нуля, мы будем получать возможные для механизма числа подвижных звеньев и низших пар. При t = О имеем п — р = 1 и, следовательно, получаются схемы весьма распространенных механизмов, приведенные на фиг. 19 и 20. Такие механизмы с одним подвижным звеном и одной парой, в которую подвижное звено связано с неподвижным, по классификации Ассура представляют собой
- механизмы I класса 1-го порядка. При t = 1 получаем п = 3, р = 4. Механизм с таким числом звеньев и таким числом •ЯЯ77 пар может быть получен путем присоединения к механизму I класса 1-го порядка группы, состоящей из двух звеньев и Такая группа называется г р у п п о й I к л а с с а я д к а или д в у х п о в о д к о в о й г р у п п о й . Фиг. О 19. Фиг. 20. пар. п о р трех 2-го В такой группе в одну кинематическую пару соединены два звена, а по концам звеньев располагаются элементы кинематических пар, в которые звенья
соединяются с двумя разными звеньями какоголибо механизма. При введении в состав механизма двухповодковой группы, т. е. при увеличении числа подвижных звеньев механизма на два и числа низших пар на три, число степеней подвижности в соответствии с формулой (1) не претерпевает изменений. В зависимости от числа содержащихся в группе вращательных и поступательных пар и их взаимного расположения группы могут быть разных видов. Два разных вида низшей пары могут быть расположены в середине между звеньями и по концам звеньев в 23 =
8 разных указанных ниже комбинациях, где буквами В и П обозначены вращательные и Людмила Фирмаль
поступательные пары: № комбинации 1 2 3 4 5 6 ВВВ ВВП ВПВ ВПП ПВВ ПВП 7 8 ппв ппп Из этих восьми возможных комбинаций следует вычеркнуть комбинации № 5 и 7, потому что в перевернутом виде первая из них повторяет комбинацию № 2, а вторая — комбинацию № 4. Комбинация № 8 не является подходящей для образования механизма с одной степенью подвижности путем присоединения ее к основному механизму I класса 1-го порядка, так как она содержит только поступательные пары, а для кинематических цепей, имеющих только поступательные пары, будет справедливой не формула (1), а формула (2). По этой формуле получаем число степеней подвижности
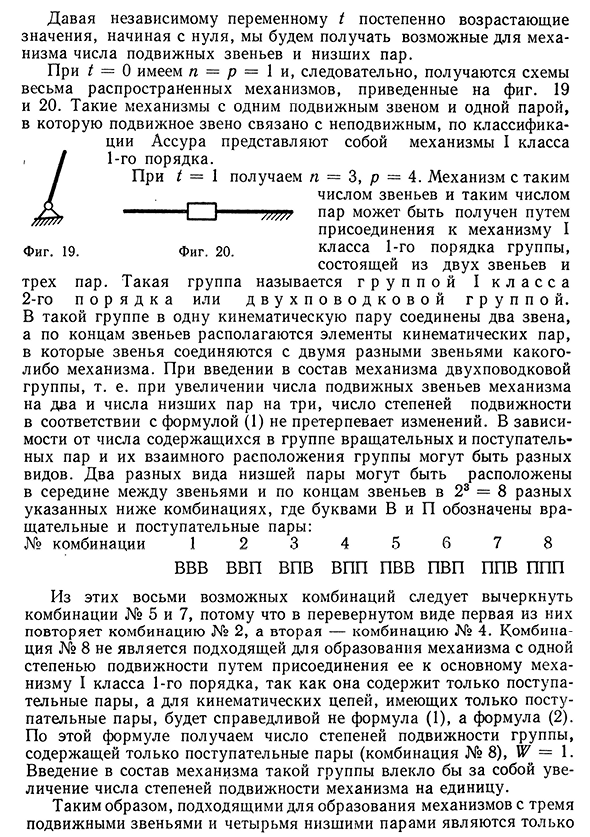
группы, содержащей только поступательные пары (комбинация № 8), W = 1. Введение в состав механизма такой группы влекло бы за собой увеличение числа степеней подвижности механизма на единицу. Таким образом, подходящими для образования механизмов с тремя подвижными звеньями и четырьмя низшими парами являются толькоКлассификация механизмов 19 пять видов двухповодковой группы. Присоединяя пять разных двухповодковых групп к основным механизмам I класса 1-го порядка, можно получить несколько разных механизмов с тремя подвижными звеньями и четырьмя низшими парами. На фиг. 17 и 21 приведены схемы двух таких механизмов, широко применяемых в современной технике. Фиг. 21. Фиг 22. При t =
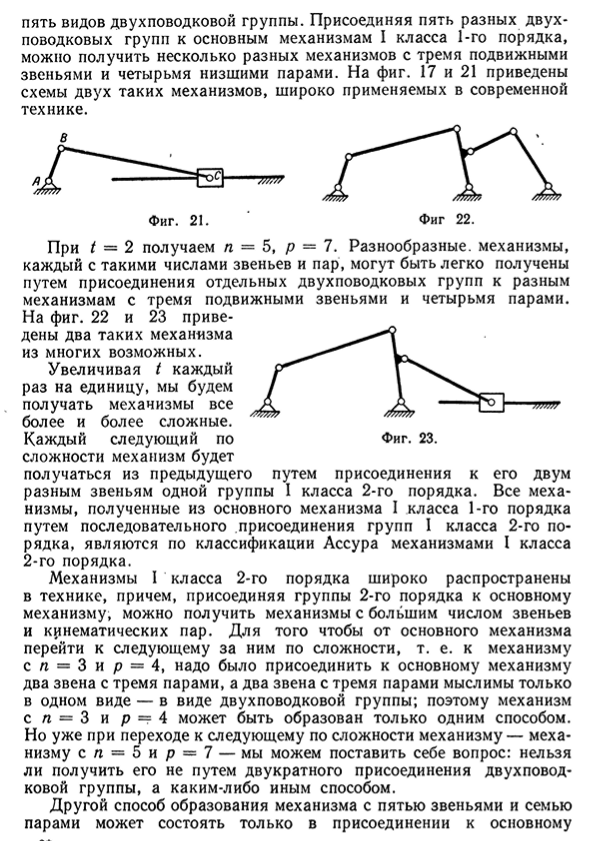
2 получаем п = 5, р = 7. Разнообразные, механизмы, каждый с такими числами звеньев и пар, могут быть легко получены путем присоединения отдельных двухповодковых групп к разным механизмам с тремя подвижными звеньями и четырьмя парами. На фиг. 22 и 23 приведены два таких механизма из многих возможных. L Увеличивая t каждый раз на единицу, мы будем получать механизмы все более и более сложные. Каждый следующий по Фиг. 23. сложности механизм будет получаться из предыдущего путем присоединения к его двум разным звеньям одной группы I класса 2-го порядка. Все механизмы, полученные из основного механизма I класса 1-го порядка путем последовательного присоединения групп I класса 2-го
порядка, являются по классификации Ассура механизмами I класса 2-го порядка. Механизмы I класса 2-го порядка широко распространены в технике, причем, присоединяя группы 2-го порядка к основному механизму, можно получить механизмы с большим числом звеньев и кинематических пар. Для того чтобы от основного механизма перейти к следующему за ним по сложности, т. е. к механизму с и = 3 и р = 4, надо было присоединить к основному механизму два звена с тремя парами, а два звена с тремя парами мыслимы только в одном виде — в виде двухповодковой группы; поэтому механизм с п = 3 и р = 4 может быть образован только одним способом. Но уже при переходе к следующему по сложности механизму— механизму с п = 5 и р = 7 — мы можем поставить себе вопрос: нельзя ли получить его не путем двукратного присоединения двухповодковой группы, а каким-либо
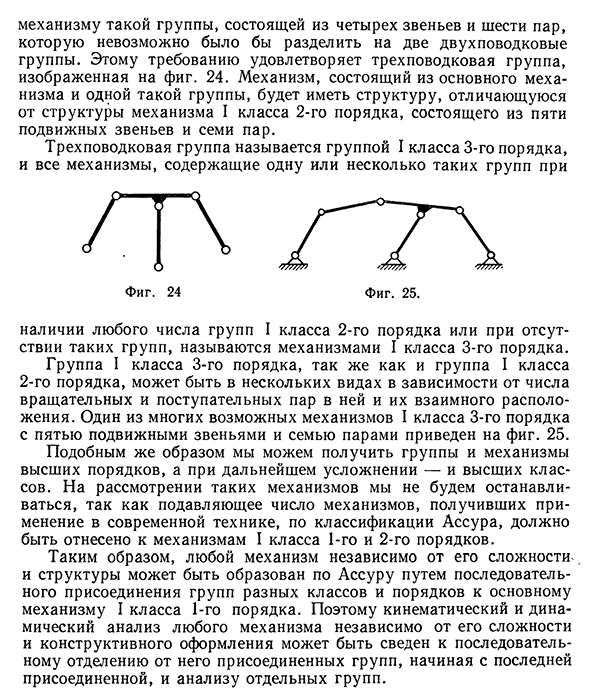
иным способом. Другой способ образования механизма с пятью звеньями и семью парами может состоять только в присоединении к основному 2*Структурный анализ плоских механизмов механизму такой группы, состоящей из четырех звеньев и шести пар, которую невозможно было бы разделить на две двухповодковые группы. Этому требованию удовлетворяет трехповодковая группа, изображенная на фиг. 24. Механизм, состоящий из основного механизма и одной такой группы, будет иметь структуру, отличающуюся от структуры механизма I класса 2-го порядка, состоящего из пяти подвижных звеньев и семи пар. Трехповодковая группа называется группой I класса 3-го порядка, и все механизмы, содержащие одну или несколько таких групп при Фиг. 24 Фиг. 25. наличии любого числа групп I класса 2-го порядка или при отсутствии таких групп,
называются механизмами I класса 3-го порядка. Группа I класса 3-го порядка, так же как и группа I класса 2-го порядка, может быть в нескольких видах в зависимости от числа вращательных и поступательных пар в ней и их взаимного расположения. Один из многих возможных механизмов I класса 3-го порядка с пятью подвижными звеньями и семью парами приведен на фиг. 25. Подобным же образом мы можем получить группы и механизмы высших порядков, а при дальнейшем усложнении — и высших классов. На рассмотрении таких механизмов мы не будем останавливаться, так как подавляющее число механизмов,
получивших применение в современной технике, по классификации Ассура, должно быть отнесено к механизмам I класса 1-го и 2-го порядков. Таким образом, любой механизм независимо от его сложности и структуры может быть образован по Ассуру путем последовательного присоединения групп разных классов и порядков к основному механизму I класса 1-го порядка. Поэтому кинематический и динамический анализ любого механизма независимо от его сложности и конструктивного оформления может быть сведен к последовательному отделению от него присоединенных групп, начиная с последней присоединенной, и анализу отдельных груп.
Смотрите также:
Предмет Теория Машин и Механизмов ТММ
| Степени свободы плоской кинематической цепи | Замена высших пар низшими |
| Механизм и машина | Наиболее распространенные виды механизмов |
