
Оглавление:

Колебания систем с конечным числом степеней свободы
- Вибрация системы с конечными степенями свободы. Рассмотрим механическую систему, состоящую из упругих конструкций, несущих большое количество сосредоточенных нагрузок. Во-первых,
представьте себе эти товары в виде материальных точек, от 1 до р. Давайте отобразим ult ut.. . ИП движение товаров, массы МТ, тг.. . Связь между силой, приложенной к нагрузке, P
,, Pt,.. . , Р», и соответствующего смещения определяется из следующего Людмила Фирмаль
соотношения: «1=МК р б«р, 4-.. . 4-b1iri , И P= «4»+ * • * + Или запись аббревиатуры, C170-1) Единичное смещение B^определяется, как описано в§ 159. Разрешая (161.1) относительно Пит, мы достигаем
следующих соотношений:: Р=^а(j = л, 2,.. . (170.2) З=я Как мы уже видели, коэффициент влияния b^прост, а расчет коэффициента жесткости ка сложнее. Теперь давайте представим, что система работает. Если движение груза равно»,• (/), то его ускорение равно y,
- — (/). Чтобы составить уравнение движения, положим в соотношение (170.1) или (170.2) Принцип§ 1 7 0] колебания системы с конечным числом свобод 3 7 1 Д а л а м Б Е Р А а, Возьми: y (1 7 0. Три. ) Или (1 7 0. Четыре. ) Форма (170.4) для записи уравнений движения механической системы проще, и поэтому коэффициент влияния Sy
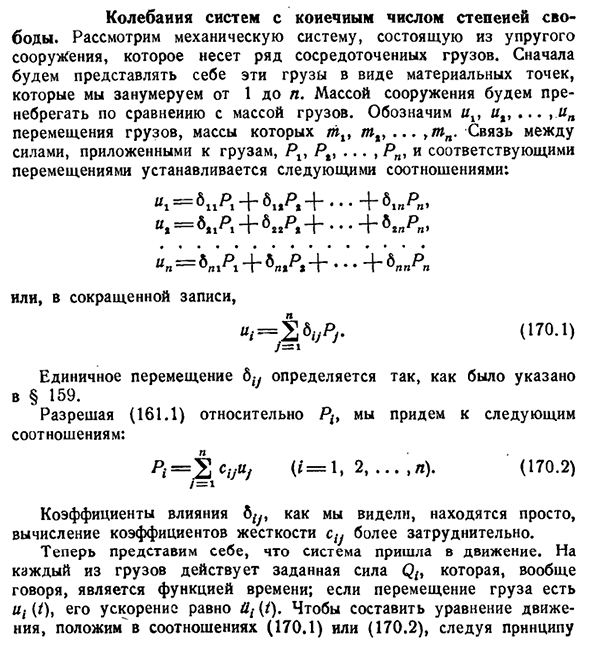
легче определяется, поэтому в большинстве случаев в этом нет необходимости. Кстати, на практике никакой нагрузки не требуется, и система свободна в числе от единицы до n. поэтому, например, мы хотим решить проблему вибрации иллюстрированного кадра O-X. 258 с ГРУ- ——— 11 ———-П—————1 ) Наконец, он представлен 1, 2 и 3 степенями свободы, соответствующими горизонтали, вертикали и вращению. Как использовать 258 TX=t3
представляет собой массу Людмила Фирмаль
груза, T3-момент инерции, 3 и ut-линейное перемещение, ut-угол поворота. На графике здания показан момент от одной силы и одного момента, и с помощью графоаналитического метода вычисления интеграла Мора мы видим, что это необходимо. В технике заклинивающая сила, как известно, встречается довольно редко, обычно задается только частота заклинивающей силы, и поэтому
вычислительная задача заключается в свободной вибрации свободной вибрации для выявления возможности резонанса, которую мы ставим в уравнение движения Q; — 0 и ищем решение в виде Uj=Sin (1 7 0. Пять. ) Результат присвоения уравнения(170.5)уравнению движения выглядит следующим образом: (1 7 0. Шесть. ) Или (1 7 0. Семь. )
Смотрите также:
