
Оглавление:

Координатный способ изучения движения
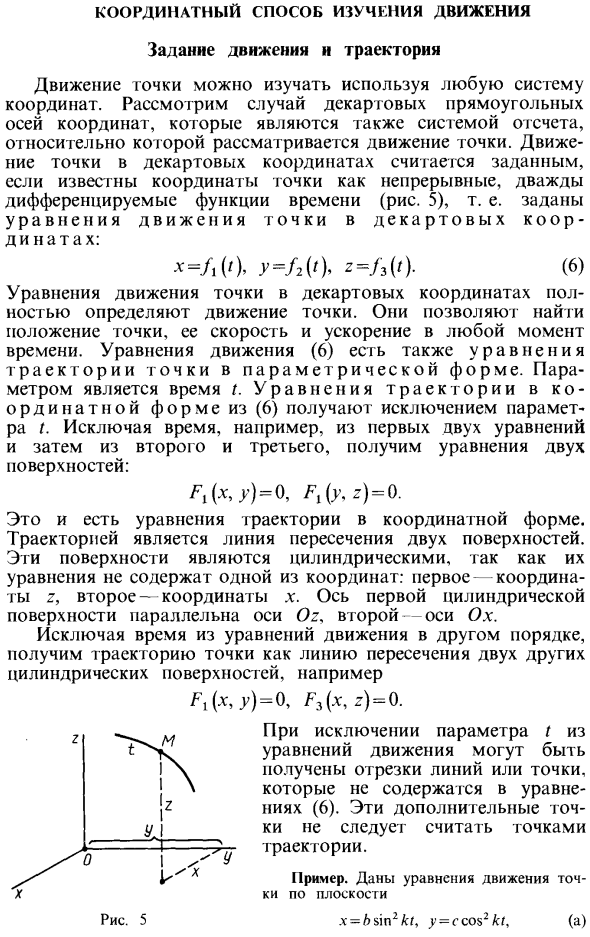
- Назначение движения и траектория. Движение точки может быть исследовано с использованием любой системы координат. Рассмотрим случай декартовых декартовых осей. Это также система отсчета, в которой учитывается перемещение точки. Если координаты точки известны как непрерывная функция, которую можно дифференцировать дважды по времени (рисунок 5), предполагается, что дано движение точки в декартовых координатах. То есть уравнение движения декартовой точки имеет вид: х = А (0.> — = / 2 (0 «2 = / 3 (0- (6).
Декартово уравнение движения точек полностью определяет движение точек. Они позволяют это! Найти положение точки, ее скорость и ускорение в любое время. Уравнение движения (6) также является параметрическим уравнением точечной траектории. Параметр — время t. Уравнение орбиты в координатной форме из (6) получается путем исключения параметра E. Например, исключите время из первых двух уравнений, а затем получите два поверхностных уравнения из второго и третьего. L L (y .-) — 0 Это орбитальные уравнения в координатной форме. Траектория — это пересечение двух поверхностей.
Направление движения точки зависит от системы приложенных к ней сил, и на эту точку накладывается возможное движение рассматриваемых точек из заданного положения. Людмила Фирмаль
Эти поверхности являются цилиндрическими, потому что уравнение не содержит одну из координат. Первая координата — это координата z, а вторая — координата x. Ось первой цилиндрической поверхности параллельна оси Oz и второй оси Ox. Исключите время из уравнения движения в другом порядке и получите точечную траекторию как пересечение двух других цилиндрических поверхностей. Например, A (x, y) = 0, F3 (x, z) = 0 Если параметр t исключен из уравнения движения, вы можете получить линии или точки, которые не включены в уравнение (6). Эти дополнительные точки не должны считаться точками траектории. R £ 1 Рисунок 5 Пример.
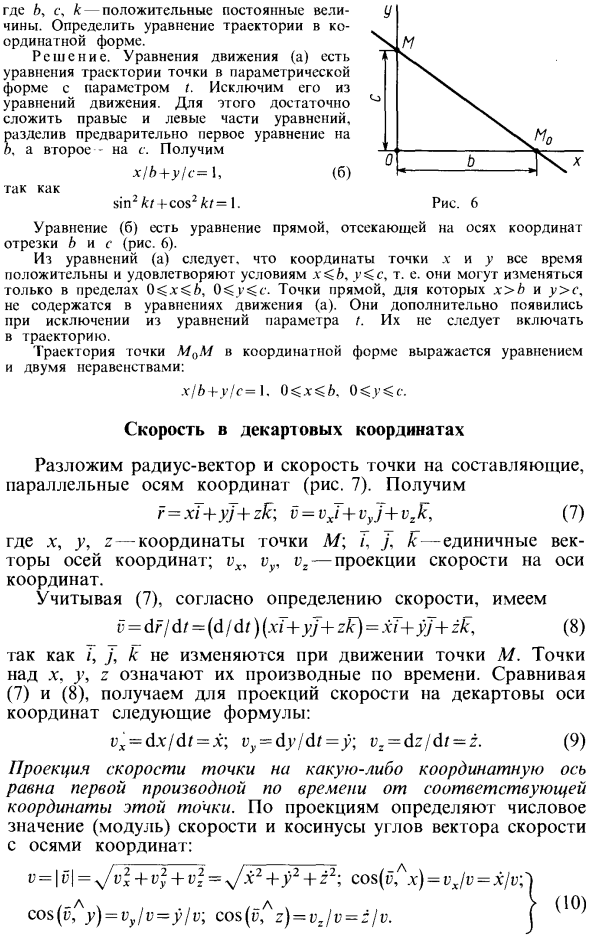
Дано точечное уравнение движения. x = /> sin2t! , Y = c cos2 kt, (а) Где б, с. k является положительным постоянным значением. Определите орбитальное уравнение в координатной форме. Решения. Уравнение движения (а) представляет собой параметрическое уравнение точки в форме параметра с параметром t. Исключить из уравнения движения. Для этого достаточно сложить правую и левую части уравнения. Сначала первое уравнение делится на o. Второй -р. получить x) b + y1c = 1, sin2kt t-cos2kt = I (6) Рис. 6 Уравнение (b) — это линейное уравнение, которое разрезает отрезки b и e по координатным осям (рисунок 6).
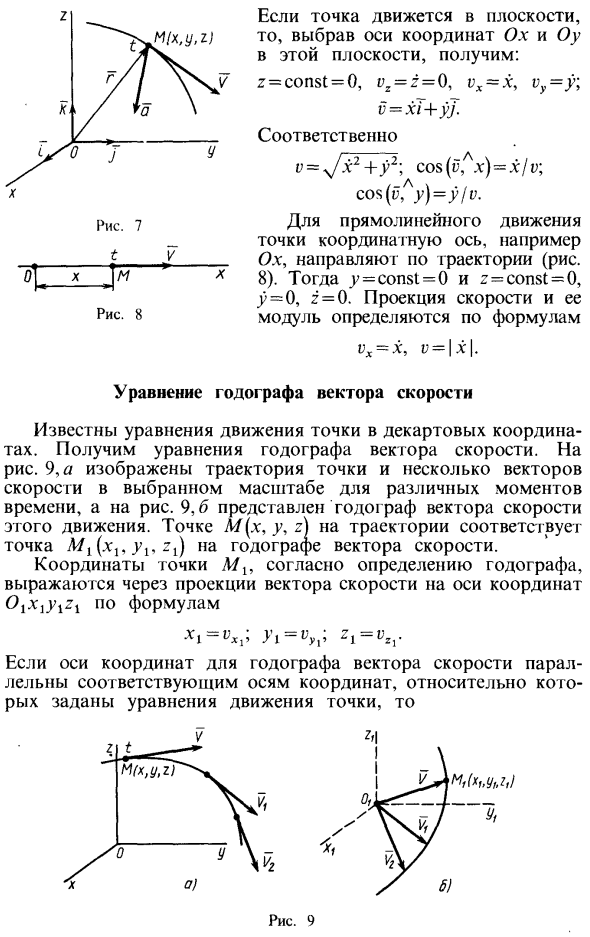
Из уравнения (а) координаты точек x и y всегда положительны и удовлетворяют условию x ^ b, y ^ c, то есть диапазон 0 ^ x ^ b, x> B и y> s. ns входит в уравнение движения (а). Они дополнительно отображаются, когда параметр A исключен из уравнения, но не должен включаться в траекторию. Локус точки M „M в координатной форме представлен уравнением и двумя неравенствами. Он лен и удовлетворяет условиям x ^ b, p. В пределах 0 ^ x ^ b, точка линии. xlb + y / c = t. Osix ^ б. Декартова скорость Разлагает точечный радиус-вектор и скорость на компоненты, параллельные координатным осям (рисунок 7). r = xi + yj + z1c, v = vj + vyj + vzli, (7) Где x, y, r — координаты точки М. T, j, k.
Одиночный вектор осей. vx, vy, vz — проекция скорости на оси. Учитывая (7), согласно определению скорости, v = df / dl = (d / dt) (xT + y7 + zk) = xT + yj + zk, (8) Поскольку точки i, j и k не изменяются при перемещении точки M, точки на x, y и z представляют производные по времени. Сравнение (7) и (8) дает следующее уравнение для проекции скорости на оси декартовых координат. vx = dx / dt = x; vy = dy / dt = y; vz = dz / dt = z (9) Проекция скорости точки на ось координат равна первой производной по времени соответствующей координаты этой точки. Проекция определяет косинус угла между значением скорости (модулем) и осью координат оси скорости.
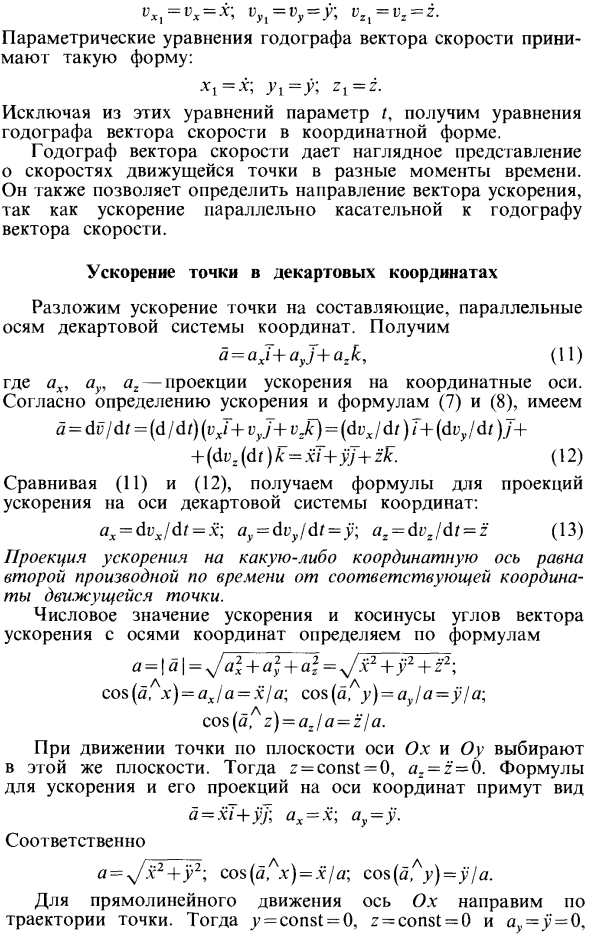
- Если точка перемещается в плоскости, выбор осей координат Ox и Oy в этой плоскости приводит к: z = const = 0, t> z = z = 0, vx = x, v = xF + j £. И поэтому v = -Jx2 + y2 \ cos (a, x) = x / t>; cos (6, y) = y / v В случае линейного перемещения точки, оси координат (например, Ox) направлены вдоль траектории (рисунок 8). Затем j ‘= const = 0 и z = const = 0, j> = 0, z = 0. Скорость проекции и ее модуль определяются по формуле Уравнение годографа вектора скорости Уравнение движения декартовой точки известно. Получить уравнение годографа вектора скорости. На фиг.9а показана траектория в момент времени и несколько векторов скорости в различные моменты времени в выбранном масштабе. 9.6 показан годограф вектора скорости этого движения.
Точка L / (x, y, z) на траектории соответствует точке L / 1 (x1, ylt zt) на годографе вектора скорости. Координаты точки согласно определению годографа представлены проекцией вектора скорости на координатную ось Olxiyizi по формуле. Если ось координат годографа вектора скорости параллельна оси относительных координат с учетом точечного уравнения движения, На рисунке 9 vX | = t> x = x; 1) ^ = 1)), = j; vIl = vI = z. Параметрическое уравнение годографа вектора скорости имеет вид: Xi = x; y, = y; z, = z. Удаление параметра / из этих уравнений дает уравнение годографа вектора скорости в координатной форме. Годограф вектора скорости обеспечивает визуальное представление скорости движущейся точки в различные моменты времени.
Простейшим является механическое движение, при котором материал перемещается во времени без учета физических свойств движущихся материальных тел и их изменений в процессе движения. Людмила Фирмаль
Кроме того, ускорение параллельно касательной к годографу вектора скорости, поэтому можно определить направление вектора ускорения. Декартово точечное ускорение Разлагает точечные ускорения на компоненты, параллельные осям декартовой системы координат. a = axT + ay] + get agk (11) Где dx, ay и ag — проекции ускорения на оси координат. Согласно определению ускорения и уравнениям (7) и (8), a = du / dr = (d / dt) (vj + vyj + vjc) = (dux / dr) T + (dvy / dt) J + + {dv2 (dt) k = xT + yj + zk. (12) Сравнение (11) и (12) дает формулу для проекции ускорения на оси декартовой системы координат. ax = dvx / dt = x; ay = dvy / dt = y; ax = dvx / dt = z (13).
Проекция ускорения на оси координат равна производной по времени второго порядка соответствующей координаты движущейся точки. Числовое значение ускорения и косинус угла между осью координат и вектором ускорения определяются выражением a = |. | = Ja2 + a2 + a2 = y / x2 + y2 + z2; cos (a, Lx) = axfa = x / a; cos (a ^ y) = ay / a = y / a; cos (a, z) -axla = zla. Когда точка движется вдоль плоскости, оси Ox и Oy выбираются в одной плоскости. Далее r = const = 0, ar = r = 0. Формула ускорения и ее проекция на оси имеют вид a = xi + y] \ ax = x;. ay = y. И поэтому a = y / x2 + y2; cos (a * x) = x / a; cos (a * y) = y / a В случае линейного движения ось Ox направлена вдоль точечной траектории. Тогда y = const = 0, z = const = 0 и ay = y — 0. м. Вермонт Рисунок 10 a2 = z = 0. Формула ускорения и проекции на ось быка имеет следующий вид: а = хТ; ах = х.
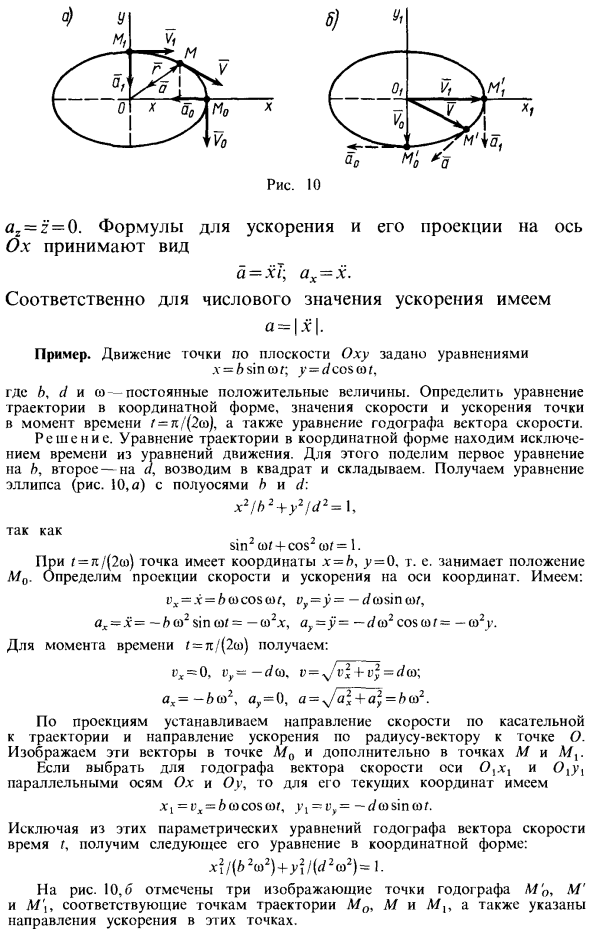
Поэтому для чисел ускорения a = | x |. Пример. Движение точки вдоль плоскости Окси определяется следующим уравнением: d и <о — постоянные положительные величины. Определите уравнение формы траектории координат, скорость и ускорение точки в момент времени 1 = n / (2a>) и уравнение годографа вектора скорости. Решения. Найти уравнение орбиты в координатной форме, исключив время из уравнения движения. Для этого разделите первое уравнение на h, разделите второе уравнение на i, добавьте квадрат и добавьте. Получить эллиптическое уравнение (рис. 10, i) полуосей h и d. J / b ^ y ^ d1-! , Для точек r = n / (2 <a) определите проекцию с координатами x = b, y = 0.
Другими словами, он занимает положение скорости и ускорения на оси координат. У нас есть: В настоящий момент получается r = n / (2 <o). Из проекции мы устанавливаем направление скорости вдоль тангенса траектории и направление ускорения вдоль вектора радиуса, причем эти векторы являются точками // и далее Если вы выбираете годограф векторов скорости с осями, параллельными осям Ox и Oy, выберите текущие координаты. Кроме меня из этих времен, мы получаем Параметрическое уравнение, следующее за его уравнением Годограф в формате координат вектора скорости: На рисунке 10.6 также отмечены и показаны три точки рисования на годографе M’o, M ‘и M \, соответствующие точкам траектории Mo, M и L /.
Смотрите также:
Задачи по теоретической механике
| Ускорение точки | Задание движения и траектория |
| Векторный способ изучения движения | Скорость в декартовых координатах |
Если вам потребуется помощь по теоретической механике вы всегда можете написать мне в whatsapp.
