
Оглавление:

Линейные скорости и ускорения точек вращающегося тела
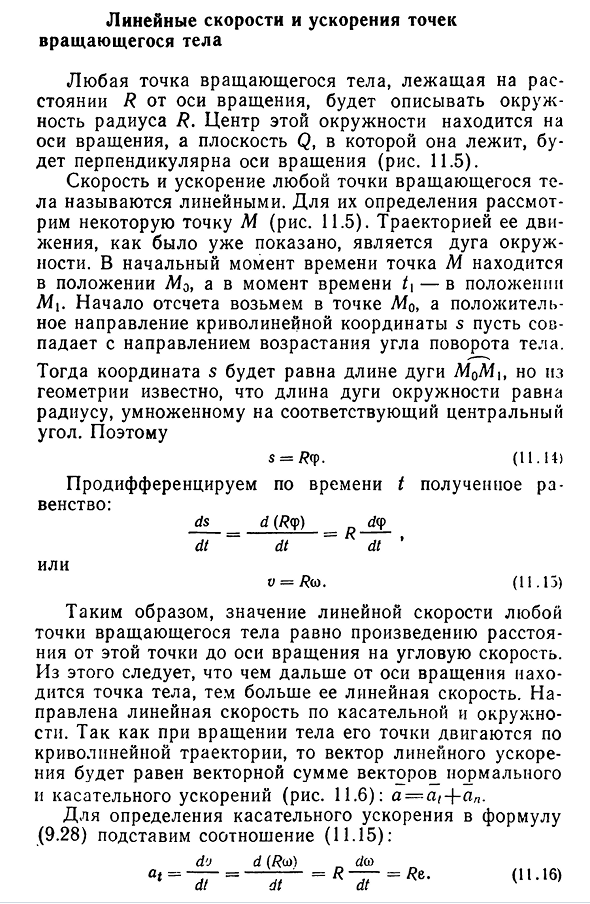
- Линейная скорость и ускорение точки ротатора-произвольная точка ротатора на расстоянии R от оси вращения, описывающая окружность радиуса/?. Центр этого круга находится на оси вращения, а плоскость, на которой он расположен, Q, перпендикулярна оси вращения(рис. 11.5). Скорость и ускорение любой точки
вращающегося тела называют линейными. Для их определения достаточно одной точки М(рис. 11.5). Как уже указывалось, траектория его движения представляет собой дугу окружности. В первый момент точка м находится в положении Л40, и время с позиции Афи. Возьмем начало координат в точке Mo,
так что положительное направление координаты кривизны s совпадает с Людмила Фирмаль
направлением увеличения угла поворота тела. Тогда координаты s будут равны длине дуги M0L1|, но из геометрии видно, что длина дуги окружности равна радиусу, умноженному на соответствующий центральный угол. s=/?Р. (1 1 1. 1 4 ) Мы различаем результирующее равенство во времени: ds__ _ _ d(/?< p)_ _ d y dt=dt «R dt’ Или u=/? c o (1 1. 1 5 ) Таким образом, величина линейной скорости любой точки
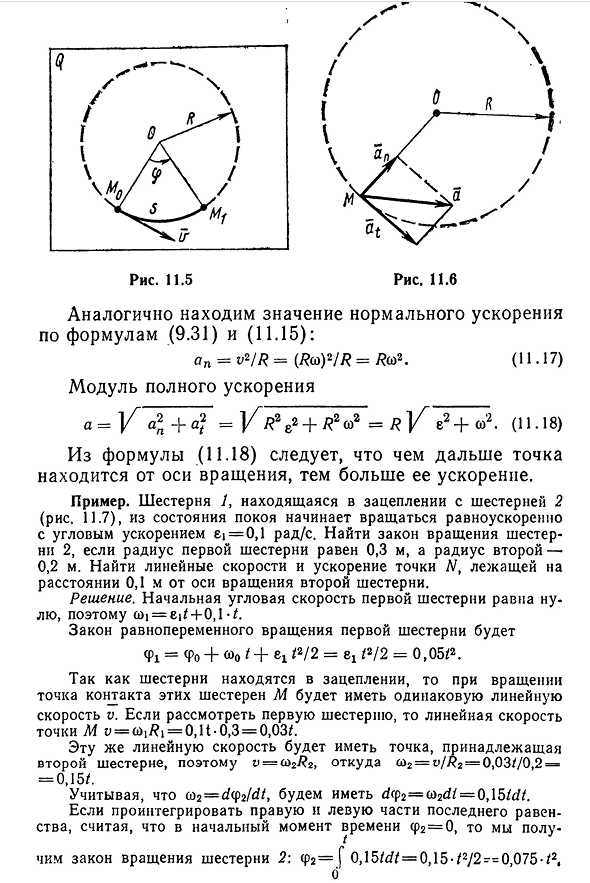
ротатора равна произведению расстояния от этой точки до оси вращения на угол поворота. От этого тем дальше от оси вращения, что линейная скорость увеличивается. Линейная скорость направлена по касательной и окружности. Поскольку вращение тела заставляет его точку двигаться по криволинейной траектории, вектор линейного ускорения равен векторной сумме векторов нормального и
- тангенциального ускорения (11.6): a=at -} — an. Для определения положительного ускорения по формуле (9.28) подставим соотношение (11.15): d (Ro)) 7t (1 1 1. 1-6. ) 1 0 3 0. Рис. 11.5. 11.6 Аналогично находим значение нормального ускорения в формулах (9.31) и (11.15): AP=v* / R=(/?2//? = / ?СО2 (11.17)) Модуль Полного Ускорения А2 п — — $ = ] L? 2e2+/?2-й>2=/? ] / Е2+П2. (11.18) Из Формулы (11.18) следует, что чем дальше точка удаляется от оси вращения, тем больше ускорение.
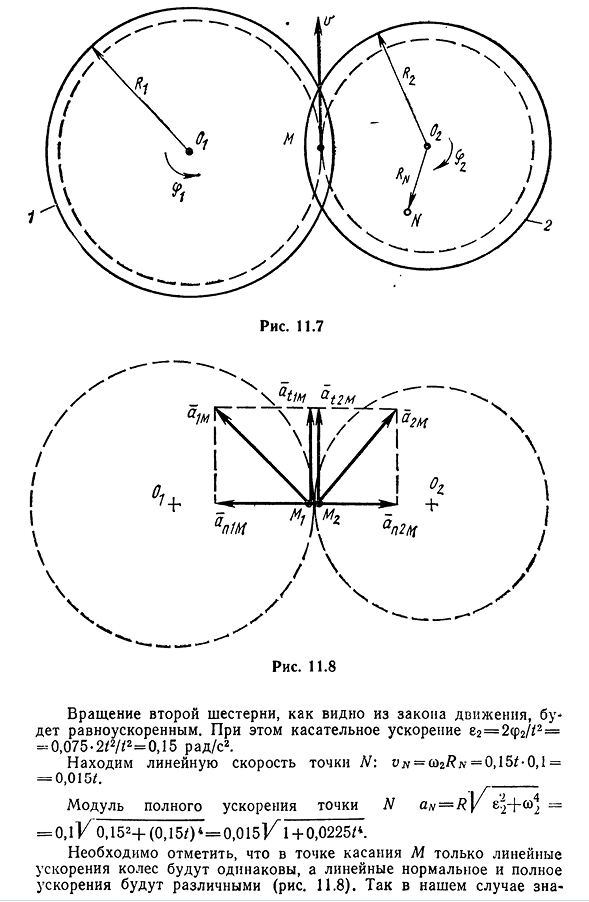
Например. Шестерня / Шестерня 2 (Рис. 11.7) из оставшегося состояния начинает вращаться равномерно ускоренно с угловым ускорением 81=0,1 Радиана / сек. Решение. Так как начальная угловая скорость первой передачи равна нулю(Oi=ei/+0, l-T. Закон равного вращения первой шестерни равен= < Ro».^2/ 2 = 8^ /2/ 2 = 0 ,05/2 . Так как шестерни находятся в зацеплении, то вращение точек соприкосновения этих шестерен M будет иметь одинаковую линейную скорость V. 1=0, а -0.3=0.03/. Поскольку та же линейная скорость имеет точку, принадлежащую второй передаче, y=CO2/?2, где (O2=и/#2 = 0,03//0,2 = = 0,15/.
Учитывая, что CO2= (/() / d t, мы имеем dcp2=(o)/ =0.15/ ( / / . Если мы интегрируем левую и правую части Людмила Фирмаль
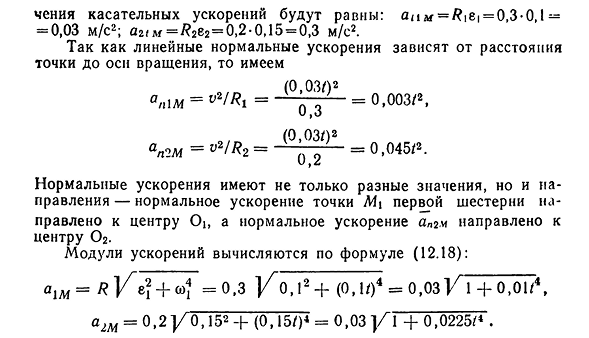
последнего уравнения, то получим закон вращения шестерни 2\CP2=f в первый раз(P2=0,15/(// = 0,15-/2/2-=0,075/2. б Вращение 104-й шестерни равномерно ускоряется, как видно из законов движения. В этом случае тангенциальное ускорение E2=2(p2l2= = 0,075 -2/2//2=0,15 Радиан / С2. Найти линейную скорость точки N: Y нет. (O2/?л=0.15/-0.1= = 0.015/. Суммарный коэффициент ускорения для точки N=e24′(Y1= = 0,11/ 0,152+(0,150 4 = 0,015 К1 + 0,0225/. Следует отметить, что в точке контакта м только линейное ускорение колеса остается одинаковым, а линейное нормальное и полное ускорения различны(рис. 11.8). Итак, в нашем случае знание- 105чения тангенциального
ускорения будут равны: с м=/?iei=0,3-0, l= = 0,03 м / с2; agmg=/?2B2=0,2-0,15 = 0,3 м/с2. Так как линейное нормальное ускорение зависит от расстояния точки до оси вращения, то имеем (0,0302 °»W== — O3 7=0.003 / 2 , Отчет / (0.03/) 2 P2m= ^ 2 = — 0> 2 = 0,045/2. Нормальное ускорение имеет не только различные значения, но и направления-нормальное ускорение первой точки передачи направлено к центру 01, а нормальное ускорение а » 2 м-к центру О2. Модуль ускорения рассчитывается по формуле (12.18): A1M=+=0, 3K O. 1 2+(0, K)4 = 0 ,0 3 ^ 1 + 0 , 01/4 , am= 0 ,2 ]/0 ,1 5 2 + (0,15/)4 = 0 ,0 3 ]/1 + 0,0225/*.
Смотрите также:
Решение задач по технической механике
| Нормальные напряжения при изгибе балки | Работа постоянной силы при прямолинейном движении |
| Понятие о колебаниях сооружений | Работа переменной силы на криволинейном пути |
Если вам потребуется заказать решение по технической механике вы всегда можете написать мне в whatsapp.
