
Оглавление:

О расчете пространственных рамных систем
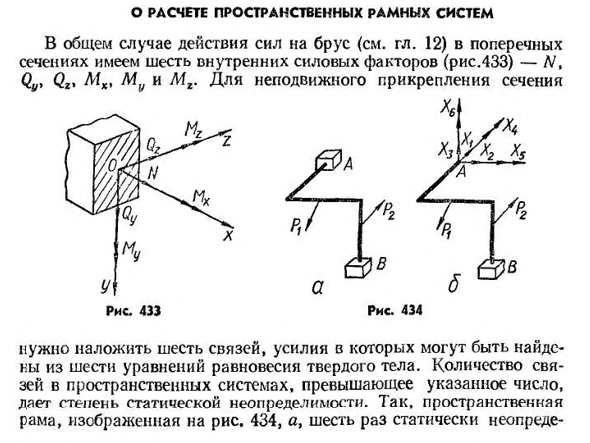
- Для расчета системы пространственных рамок В общем случае действие силы на балку в разрезе(см. Главу 12) имеет шесть внутренних коэффициентов силы (фиг.433) — фиксированный раздел N, Qyi Qz>m xt M y и M G. для вспомогательного оборудования Рис
433фиг. Четыреста тридцать четыре. Его сила может быть определена из шести уравнений равновесия твердых тел.
Число связей в пространственной системе, выходящее за пределы указанного Людмила Фирмаль
числа, дает некоторую степень статической неопределенности. Таким образом, пространственная рамка показана на рисунке. 434, шесть раз статически неопределенно- Рис. 428 неопределенных систем, поскольку для определения двенадцати неизвестных реакций может быть выполнено только шесть условий равновесия. Одним
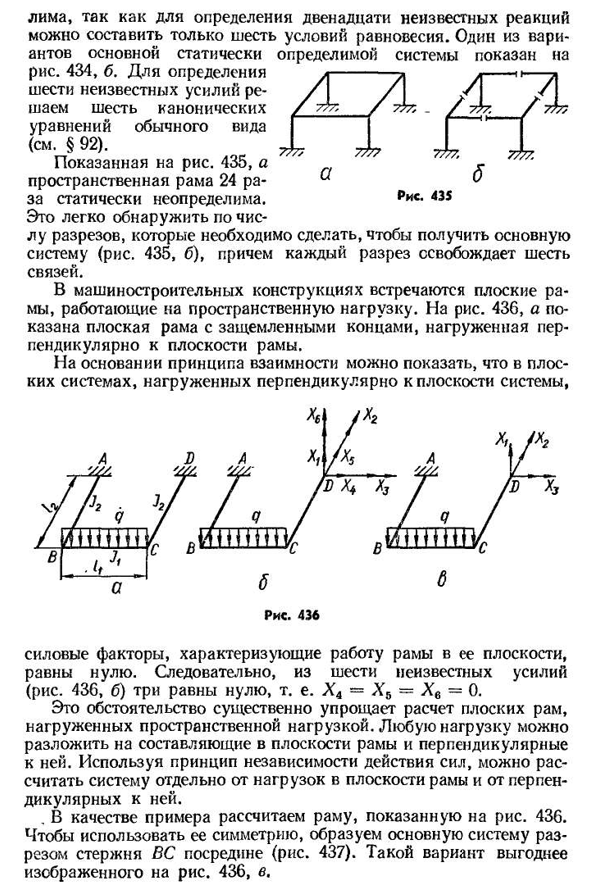
из вариантов является базовая статическая диаграмма. 434, b. To определив шесть неизвестных сил, мы решаем шесть канонических уравнений обычного вида (см.§ 92). Показано на фиг. 435, а пространство кадра 24 раза статически неопределенных. Это легко обнаруживается по количеству разрезов, которые необходимо сделать для получения базовой системы(рис. 435, б)
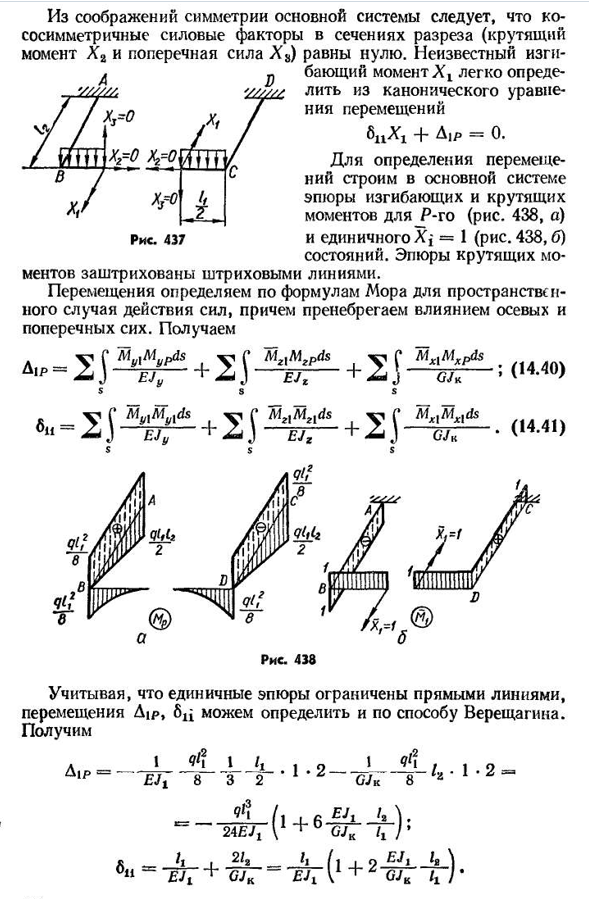
- каждый разрез выпускает шесть облигаций. В инженерном сооружении имеется плоская рама, на которую действует пространственная нагрузка. Для риса. 436, и показывает плоскую рамку с зажатыми концами, которые нагружают перпендикулярно плоскости рамы. На основе принципа взаимности показано, что в плоской системе она нагружается перпендикулярно плоскости системы, Коэффициент силы, характеризующий работу рамы
в ее плоскости, равен нулю. Следовательно, из шести неизвестных усилий. 436, б) эти три равны нулю, то есть X4=XY=X b = 0. Такая ситуация значительно упрощает расчет каркаса, на который устанавливается пространственная нагрузка. Любая нагрузка раскладывается на составляющие в плоскости рамы, перпендикулярной раме. Используя принцип независимости действия силы, можно рассчитать систему отдельно от нагрузки на плоскость рамы и от перпендикуляра к ней.. В качестве примера, мы рассчитаем кадр, показанный на рисунке.
Четыреста тридцать шесть Чтобы использовать его симметрию, сформируйте основную Людмила Фирмаль
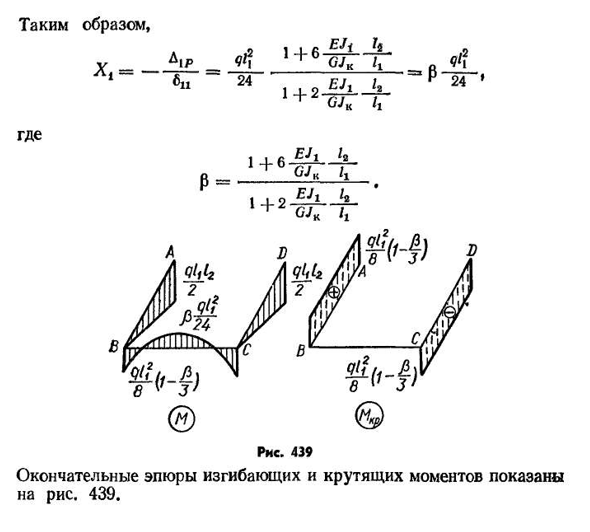
систему, разрезав стержень в центре (рис. 437). Этот вариант более информативен, как показано на рисунке. 436, ст. Причина симметрии основной системы 429 заключается в том, что коэффициент силы косой симметрии секций секции (крутящий момент x2 и боковая сила X8) равен нулю. Неизвестные изгибающие моменты могут быть легко определены из канонического уравнения перемещения =0. Для определения смещения построим основную системную схему изгиба и крутящего момента для Р-го(рис. 438, а) и Единицы измерения » =1 (Рис. 438,6) государство. График крутящего момента затенен
пунктирными линиями. Смещение определяется по формуле моля в пространственном случае действия сил, игнорирующих влияние осевых и боковых сил. Получать С (14.40)) Четыреста тридцать восемь Учитывая, что единичный участок ограничен прямыми линиями, движение АТП можно определить по методу Верещагина. Возьми A1R — 418 способов, +6 11+1 2GJ Четыреста тридцать девять риса На рисунке показан последний изгиб и диаграмма крутящего момента. Четыреста тридцать девять
Смотрите также:
| Определение перемещений в статически неопределимых системах | Определение напряжений в кривых брусьях |
| Контроль правильности решения статически неопределимой системы | Расчет на прочность кривых брусьев |
