
Оглавление:


Определение основных размеров маховика двигателя
- Колебания угловой скорости вращения маховика в пределах одного цикла происходят, в основном, как показано выше, вследствие несовпадения законов изменения момента движущих сил 12 * 180 Движение и работа машин момента и сил сопротивлений. Уясним себе подробнее явления, происходящие при установившемся движении, и соображения, которыми необходимо руководствоваться при определении основных размеров маховика (фиг. 18). Будем имет
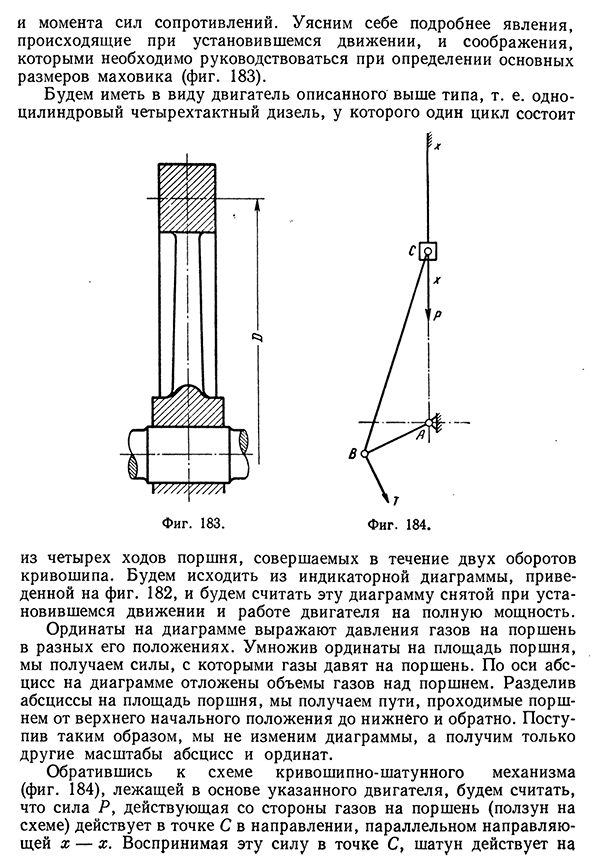
четырехтактный дизель, у которого один цикл состоит из четырех ходов поршня, совершаемых в течение двух оборотов кривошипа. Будем исходить из индикаторной диаграммы, приведенной на фиг. 182, и будем считать эту диаграмму снятой при установившемся движении и работе двигателя на полную мощность. Ординаты на диаграмме выражают давления газов на поршень в разных его положениях. Умножив ординаты поршня на площадь, мы получаем силы, с которыми газы давят на поршень. По оси абсцисс на диаграмме отложены объемы газов над поршнем. Абсциссы поршня площадь Разделив на, мы получаем пути, проходимые поршнем
от верхнего начального положения до нижнего и обратно. Поступив Людмила Фирмаль
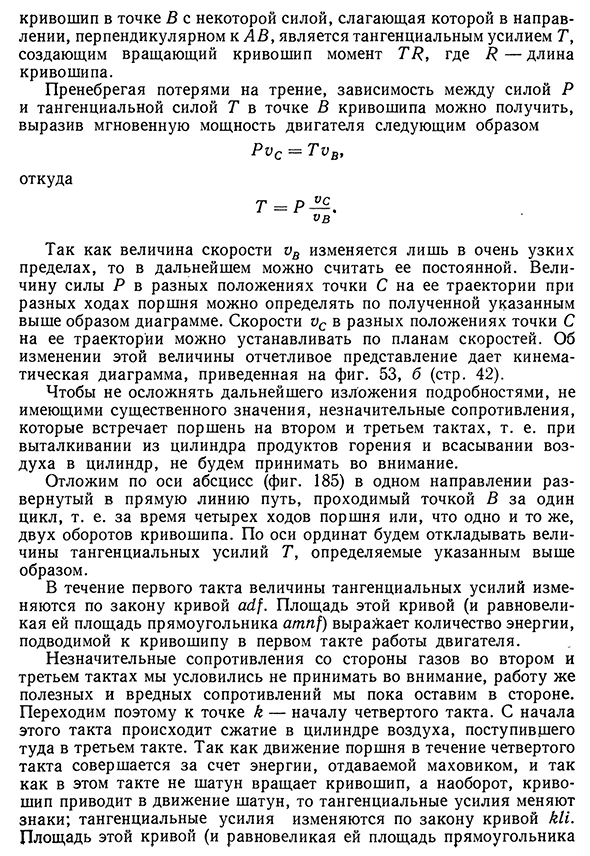
таким образом, мы не изменим диаграммы, а получим только другие масштабы абсцисс и ординат. Обратившись к схеме кривошипно-шатунного механизма (фиг. 184), лежащей в основе указанного двигателя, будем считать, что сила Р, действующая со стороны газов на поршень (ползун на схеме) действует в точке С в направлении, параллельном направляющей х — х. Воспринимая эту силу в точке с, шатун действует наопределение основных размеров маховика двигателя 181 кривошип в точке В с некоторой силой, слагающая которой в направлении, перпендикулярном к АВ, Т является тангенциальным усилием, создающим вращающий момент кривошип ТР, где 7?длина кривошипа. ПВХ, зависимость между силой р и тангенциальной силой т в точке в кривошипа можно получить, PVC ПВХ =:ТВБ, откуда Т = ^Р ~ -это немного шокирует. Так как
величина скорости глаг изменяется лишь в очень узких пределах, то в дальнейшем можно считать ее постоянной. Величину силы Р в разных положениях С точки на ее траектории при разных ходах поршня можно определять по полученной указанным выше образом диаграмме. Скорости ВК в разных положениях С точки на ее траектории можно устанавливать по планам скоростей. Об изменении этой величины отчетливое представление дает кинематическая диаграмма, приведенная на фиг. 53, б (стр. 42). Чтобы не осложнять дальнейшего изложения подробностями, не имеющими существенного значения, незначительные сопротивления, которые встречает поршень на втором и третьем тактах, т. е. при
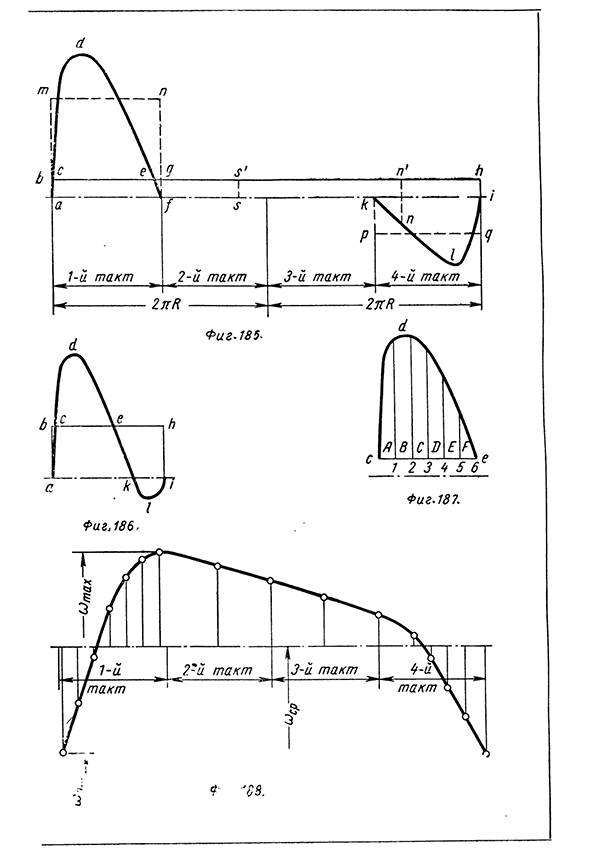
- выталкивании из цилиндра продуктов горения и всасывании воздуха в цилиндр, не будем принимать во внимание. Отложим по оси абсцисс (фиг. 185) в одном направлении развернутый в прямую линию путь, проходимый точкой в за один цикл, Т. е. за время четырех ходов поршня или, что одно и то же, двух оборотов кривошипа. По оси ординат будем откладывать величины тангенциальных усилий Т, определяемые указанным выше образом. АДФ. Площадь этой кривой (AMN amnf) выражает количество энергии, подводимой к кривошипу в первом такте работы двигателя. Незначительные сопротивления со стороны газов во втором и третьем тактах мы условились не принимать во внимание, работу же полезных и вредных сопротивлений мы пока оставим в стороне. Переходим поэтому к точке к — началу четвертого такта. С начала
этого такта в цилиндре происходит сжатие воздуха, поступившего туда в третьем такте. Так как движение поршня в течение четвертого такта совершается за счет энергии, отдаваемой маховиком, и так как в этом такте не шатун вращает кривошип, а наоборот, кривошип приводит в движение шатун, то тангенциальные усилия меняют знаки; тангенциальные усилия изменяются по закону кривой кли. Площадь этой кривой (и равновеликая ей площадь прямоугольникадвижение и работа машинопределение основных размеров маховика двигателя 183 kpqt) выражает количество энергии, возвращаемой маховиком в тот же источник, из которого энергия была им получена в первом такте.
Эта возвращаемая маховиком энергия, содержащаяся в сжатом воздухе, используется Людмила Фирмаль
целиком двигателем в первом такте следующего цикла. Из изложенного выше вытекает, что на работу полезных и вредных сопротивлений может быть израсходована только разность энергий, ad АДФ и кли. Так как при установившемся движении сопротивление, приведенное к точке В кривошипа, в течение одного цикла следует считать постоянным, то разделив разность площадей кривых АДФ и кли на путь 4^7?, проходимый точкой в за один цикл, AB AB = = привет, выражающей величину этого сопротивления. AB abhia выражает, следовательно, работы сопротивлений. Перейдем теперь к угловой скорости вращения маховика. В первом такте тангенциальные усилия со стороны шатуна на кривошип в точке В значительно превышают сопротивление, оказываемое кривошипом; поэтому угловая скорость вращения кривошипа и маховика
увеличивается. Увеличение угловой скорости прекращается, когда тангенциальное усилие становится равным сопротивлению кривошипа; это происходит в точке е, ad ADF и прямая BH. Следовательно, в этой точке угловая скорость принимает значение а>тах. В течение следующих тактов на поршень действуют только сопротивления его движению, причем не только до конца четвертого такта, но и в самом начале первого такта, когда точка В проходит небольшой участок пути равный Ьс. Следовательно, u u)млн. Увеличение угловой скорости вращения маховика от <от1П до <отах происходит за счет сообщаемой маховику энергии, выражаемой площадью китайский коллектив CDEC. Обозначив энергию, выражаемую этой площадью через Л, получаем А ~ ~2 J (с^макс ^мин), где А — в кгм, а j — момент инерции маховика в кгм-сек2 со и — в сект1. Обозначив через 8 коэффициент неравномерности, равный G _ _ ^max 07 min < * ср и приняв во внимание, что _ °т а х4 ~ ш т1п ср2 ’
После подстановки получаем где п — число оборотов маховика в минуту при средней угловой скорости вращения. Момент инерции маховика получается равным I 90-А Дж Обозначив вес маховика в кг через G и считая массу — z z), D где-у расстояние от оси вращения маховика до центра тяжести поперечного сечения обода (см. фиг. Сто восемьдесят три) Джей £\7_2 2_90л g \ 2) ~ пЧ ’ откуда GD2 = 4^ Л 3600 ~ ■ п2Ъ п2Ъ Произведение gd2 и в кг-м2 называется маховым моментом или характеристикой маховика. Определив необходимую величину махового момента, устанавливают диаметр маховика Д, руководствуясь конструктивными соображениями, а затем и соответствующий диаметру вес. Принимая во внимание момент инерции спиц, соединяющих обод с втулкой, действительный вес обода принимают приблизительно на 10% меньшим получаемого из расчета. Общий вес маховика, считая вес спиц и втулки, получается равным получается равным (1,25—1,35) G. Увеличивая диаметр,
можно значительно уменьшать вес маховика, не изменяя величины махового момента. Однако, кроме общих конструктивных соображений, при этом приходится иметь в виду, что нельзя переходить предела скорости окружной, за которым возникает опасность разрыва обода под действием центробежных сил. На практике имели место случаи, когда тяжелый кусок обода, оторвавшийся от маховика при большой скорости, разрушал оборудование и сооружения и приводил к человеческим жертвам среди обслуживающего персонала. Для маховиков из обыкновенного чугуна не принимают окружную скорость больше 30 м/сек*, для высококачественных чугунов скорость может быть принята несколько большей. В. много цилиндровых двигателях энергетические циклы в разных цилиндрах сдвигаются один относительно другого; например, в четырехцилиндровом четырехтактном двигателе рабочие ходы в разных цилиндрах
совершаются по очереди. При таком устройствеопределение основных, ‘размеров маховика двигателя 185 необходимый маховой момент двигателя получается значительно меньшим: так как первый такт в одном цилиндре совпадает во времени с четвертым тактом в другом цилиндре, то воздействие на маховик в течение каждого пол-оборота коренного вала производится по закону приведенной на фиг. 186 adkli кривой, ординаты которой представляют собой разности ординат кривых АДФ и кли на фиг. 185. Энергия, ad АДК и кли, идет на преодоление работы сопротивлений, Ab абхия. DM (DMAX в этом случае так же, как и на фиг. 185, получается в точке е, (omin — в точке с. При определении махового момента в приведенную выше формулу надо подставлять работу а, CD CDEC, которая значительно меньше
площади, обозначенной на фиг. 185 такими же буквами. При этом надо еще принять во внимание, что значительно меньший маховой момент получается несмотря на вчетверо большую мощность четырехцилиндрового двигателя. Выше мы отметили те точки пути, проходимого точкой В, в которых угловая скорость вращения звена приведения принимает крайние значения, но не касались вопроса о том, как угловая скорость изменяется от одного крайнего значения к другому. Это легко себе уяснить, пользуясь приведенной на фиг. 185 диаграммой и основываясь на уравнении движения звена приведения. Чтобы уяснить себе закон, по которому угловая скорость возрастает от wmln до WM AX, разделим участок се пути точки в точками 1,2,….5 на равные части и к се перпендикулярными линиями, проведенными из этих точек, разделим площадь ЦДО на
площади А, В, С…. (фиг. 187). Угловая скорость беспроводной доступ в точке 1 превышает за счет полученной маховиком работы движущих сил, выражаемой площадью А в кг-м и потому может быть определена из уравнения Угловая скорость Ш2 в точке 2 определяется из уравнения Л + В = ^(«2~» ти1) и т дОт точки е (фиг. 185) угловая скорость от начинает уменьшаться вследствие расхода маховиком кинетической энергии на преодоление внешних сопротивлений. Угловая скорость в WS в какой-либо точке с пути до начала четвертого такта определяется из уравнения Площ. fess’F = ~ (ш2т а х Ш2 ) . Угловая скорость в какой-либо точке п пути в течение четвертого такта может быть определена из уравнения Площ. fen ‘ nkf = 2 («max —» n) ■ Определив таким образом угловые скорости в достаточном числе точек пути, В проходимом точкой, можно построить плавную
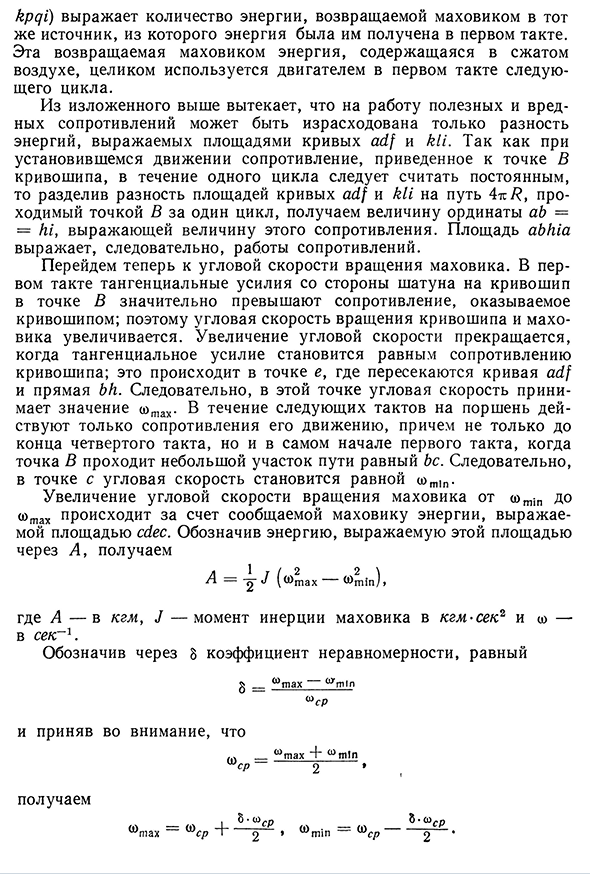
кривую, дающую отчетливое представление об изменении угловой скорости вращения звена приведения от шт щ до описывает и обратно до шцщ-На фиг. 188 приведена построенная таким образом кривая с использованием уравнения движения звена приведения.186 Движение и работа машин Во всех приведенных выше примерах кинематического анализа и основанного на кинематическом анализе кинетостатического расчета разных механизмов угловая скорость вращения кривошипа предполагалась постоянной. Теперь Мы знаем, что под постоянной угловой скоростью имелась в виду средняя угловая скорость ыср .’ Построение плана ускорений во всех положениях кривошипа начиналось с проведения вектора ав -, между тем как в разных положениях кривошипа имеет место и
тангенциальное ускорение ахв = ^ a b-La B-приведенная на фиг. 188 диаграмма дает возможность уточнять планы ускорений и основанные на них величины сил инерции. Для этой цели масштаб абсцисс на фиг. 188 r r вращения точки в , в результате чего абсциссы будут выражать углы ? поворота звена приведения, а кривая на фиг. 188 графически функцию о = /(?да что с тобой такое? Дифференцируя графически кривую ш = /(?(мы будем получать величины), мы будем получать величины~, u u f будут получаться следующим образом du du > D < P du > D < P du * dt DY dtp DT dtp где ш — угловая скорость вращения в соответствующем положении. Если принять во внимание угловые ускорения звена приведения, то планы ускорений,
построенные при ыср во всех положениях, необходимо перестроить, но планы скоростей могут остаться без изменения, так как можно уточнить лишь их масштабы. Принимать во внимание действительную, а не среднюю угловую скорость вращения кривошипа при построении планов ускорений необходимо лишь при больших коэффициентах неравномерности хода 8, допускаемых,, например, для машин ударного действия (пресса, ножницы и т. п.), при работе которых угловая скорость ведущего звена стремительно падает до минимума за время рабочих ходов и быстро возрастает до максимума во время холостых. На фиг. 188 приведена кривая ю = / (?(четырехтактного дизеля) для двигателя внутреннего сгорания (четырехтактного дизеля). Для таких двигателей коэффициент 8 1/
1/80, а если они предназначаются для приведения в движение генераторов электрического тока, то значительно меньшим. Наиболее быстрое изменение угловой скорости на величину ыср — <om in = происходит в течение первой головины оборота в первом такте. Так как угловая скорость на этом участке изменяется по закону прямой (см. фиг. 188), то угловое ускорение на этом участке можно считать равным е = -8 (ог п 30 8П (огр сек,-2 п 60 2 где п — число оборотов кривошипа в минуту и — — промежуток времени, в течение которого происходит изменение угловой скорости. Отношение величин нормального и тангенциального ускорений точки В звена приведения получается на этом участке, равным §П(пс р ~60~ La b 60 so soitn 2тс 8 30 308п 8 При 8 = 1/80 отношение а^: АВ & 500. Это значит, что при длине вектора ав на плане ускорений, равной 100 мм, длина вектора а~в получилась бы равной 0,2 мм‘, при графическом анализе ее пришлось бы принять равной нулю.
Смотрите также:
| Уравнение движения точки и звена приведения | Виды трения |
| Регулирование хода машин | Трение скольжения несмазанных тел |
