
Оглавление:

Приближенная теория гироскопа
- В этой технике используется гироскоп с соответствующей угловой скоростью 2000 5000 с 1 (20 000 50 000 об мин). В современных технологиях гироскопы очень широко используются. Явление гироскопа проявляется во всех видах движений тела, когда тело совершает сложные движения, включая вращательные движения в своей части. Предполагая, что гироскоп имеет свою собственную угловую скорость o вокруг оси симметрии или оси Oz гироскопа , давайте приблизительно рассмотрим базовое явление гироскопа быстро вращающегося гироскопа.
Основные положения приближенной теории При использовании гироскопа на различных устройствах важно знать движение его оси. Обычно соответствующее вращение вокруг оси задается, а угловая скорость соответствующего вращения поддерживается постоянной. Движение оси высокоскоростного вращающегося гироскопа можно определить по гироскопическому моменту движения, рассчитанному по неподвижной точке. Это связано с тем, что считается, что момент движения находится приблизительно вдоль оси гироскопа. В случае быстро вращающегося гироскопа угловая скорость прецессии мала по сравнению с угловой скоростью его собственного вращения, и изменение угла нутации, то есть угла между соответствующей осью вращения и осью прецессии, также маленький.
Эта энергия может быть использована для получения внешней работы путем приведения маятника обратно в его положение равновесия, в котором его скорость в самом начале была равна нулю. Людмила Фирмаль
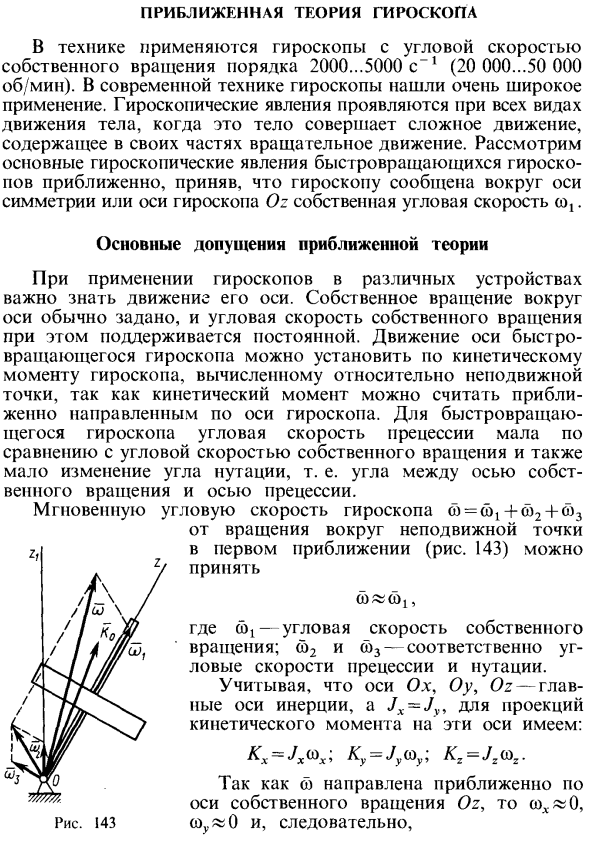
Гироскопическая мгновенная угловая скорость = = 11 + 22 + 33 может быть получена из вращения вокруг неподвижной точки в первом приближении (рис. 143). WS , Где это Угловая скорость собственного вращения; S2 и z угловые скорости прецессии и нутации соответственно. Учитывая, что оси Ox, Oy и Oz являются главными осями инерции и Jx = Jy, проекция момента движения на эти оси KX = JX X, Ky = Jyay; Kz = Jz oz. Поскольку th почти вдоль соответствующей оси вращения Oz, cox 0 ko = y ki + k + k1 .
Следовательно, в случае высокоскоростного вращающегося гироскопа с большим собственным моментом движения момент движения К имеет абсолютную величину, равную моменту собственного движения гироскопа, Ось гироскопа, (49) Это приближение гироскопического момента движения является точным, когда ось гироскопа является его фиксированной осью вращения. Для решения этих задач о движении гироскопической оси мы можем использовать теорему Резала, которая может характеризовать движение конца вектора момента движения по известному главному моменту внешней силы. Чтобы сохранить основные характеристики гироскопа, необходимо учитывать угловую скорость прецессии w 2, игнорируя только угловую скорость нутации, но при расчете момента движения гироскопа, вы используете.
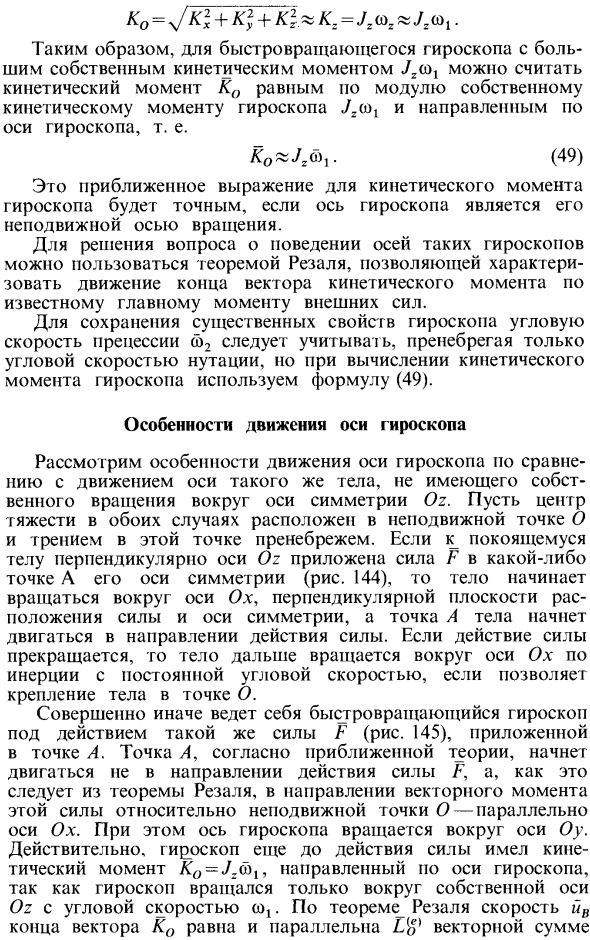
Характеристики движения оси гироскопа Рассмотрим характеристики движения гироскопической оси по сравнению с движением оси одного и того же объекта без его собственного вращения вокруг оси симметрии Oz. Поместите центр тяжести в обоих случаях в фиксированной точке O и игнорируйте трение в этой точке. Когда сила F прикладывается к телу, которое неподвижно перпендикулярно оси Oz в точке A с осью симметрии (рис. 144), тело начинает вращаться вокруг оси Ox, которая перпендикулярна оси силы и симметрии.
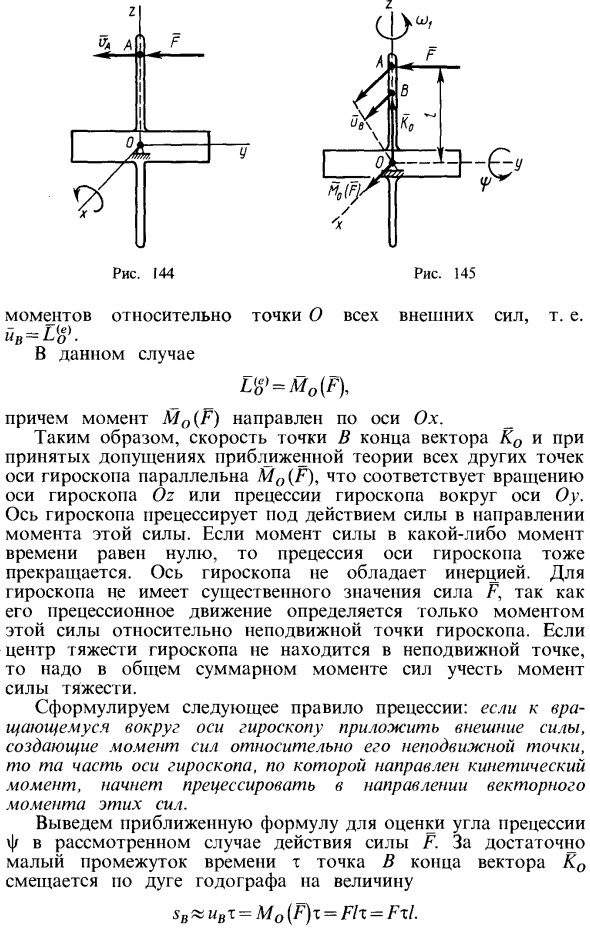
А начинает двигаться в направлении силового действия. Когда действие силы прекращается, если тело может быть зафиксировано в точке O, тело вращается дальше вокруг оси Ox с постоянной угловой скоростью из за инерции. Быстро вращающийся гироскоп ведет себя совершенно по разному при той же силе F, приложенной к точке A (рис. 145). Точка A не следует направлению силы F в соответствии с теорией приближения, но начинает двигаться в направлении, следующем из теоремы Лезала, векторный момент этой силы относительно неподвижной точки O параллелен оси Ox. Ось гироскопа вращается вокруг оси Oy.
Фактически, гироскоп вращается только вокруг своей собственной оси Oz с угловой скоростью d1, поэтому даже до того, как сила приложена, момент движения A0 = r 1, направленный вдоль оси гироскопа, равен Был. Согласно теореме Резала, скорость в конце вектора Ko равна L (o vector sum Рис. 144 Рис. 145 Моменты для всех внешних силовых точек О, т.е. В этом случае L = MO (F) и момент MO (F) направлены вдоль оси Ox. Следовательно, в конце вектора Ko скорость точки при принятых допущениях теории приближений всех других точек оси гироскопа представляет собой вращение оси гироскопа Oz или прецессию гироскопа вокруг оси Oy. Параллельно Мо (F), соответствующему движению.
Ось гироскопа прецессирует под действием силы в направлении этого момента силы. Если момент силы в любой точке равен нулю, прецессия оси гироскопа также прекратится. Ось гироскопа не имеет инерции. В случае гироскопа сила F не важна, потому что прецессия определяется только моментом этой силы относительно фиксированной точки гироскопа. Если центр тяжести гироскопа не находится в фиксированной точке, момент силы тяжести должен учитываться в общем моменте силы. Сформулируем следующие правила прецессии: когда к гироскопу, который вращается вокруг оси, прикладывается внешняя сила, а момент силы генерируется относительно его неподвижной точки.
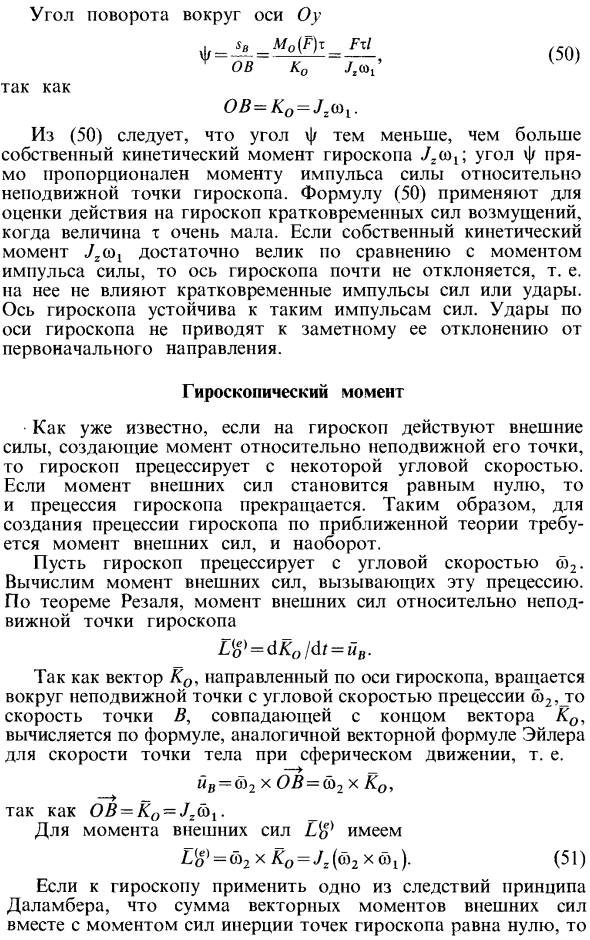
Часть начинает прецессию в направлении вектора момента этих сил. Получите приблизительное выражение для оценки угла прецессии , когда рассматривается действие силы F. За достаточно короткое время m конечная точка вектора Ko смещается вдоль дуги годографа pa. sB MBT = Af0 (F) t = Fit = Ftl. Угол поворота вокруг оси Oy zy mo (G) g M vOO Ko Ko J, Wi 0B = Ko = J ^ i. с того времени Из (50) угол мал, а момент движения гироскопа большой, а угол прямо пропорционален угловому моменту силы относительно неподвижной точки гироскопа. Уравнение (50) используется для оценки влияния кратковременных возмущающих сил на гироскоп, когда величина m очень мала.
Если собственный момент движения Jjio достаточно велик по сравнению с угловым моментом силы, ось гироскопа вряд ли будет отклоняться. Другими словами, это не зависит от краткосрочного воздействия силы или удара. Вал гироскопа устойчив к таким воздействиям. Удары вдоль оси гироскопа не приводят к значительному отклонению от первоначального направления. Гироскопический момент Как уже известно, когда внешняя сила действует на гироскоп и создает момент против этой фиксированной точки, гироскоп прецессирует с определенной угловой скоростью.
- Когда момент внешней силы становится равным нулю, прецессия гироскопа заканчивается. Следовательно, для создания гироскопической прецессии в соответствии с теорией приближения требуется момент внешней силы и наоборот. Сделайте прецессию гироскопа с угловой скоростью B2. Рассчитайте момент внешней силы, которая вызывает эту прецессию. Согласно теореме Резала, момент внешней силы к неподвижной точке гироскопа Lg = dKo d = SB. Вектор Ko, направленный вдоль оси гироскопа, вращается вокруг фиксированной точки с угловой скоростью прецессии ω2, поэтому скорость точки B, совпадающая с конечной точкой вектора Ko, является точкой на объекте при сферическом движении.
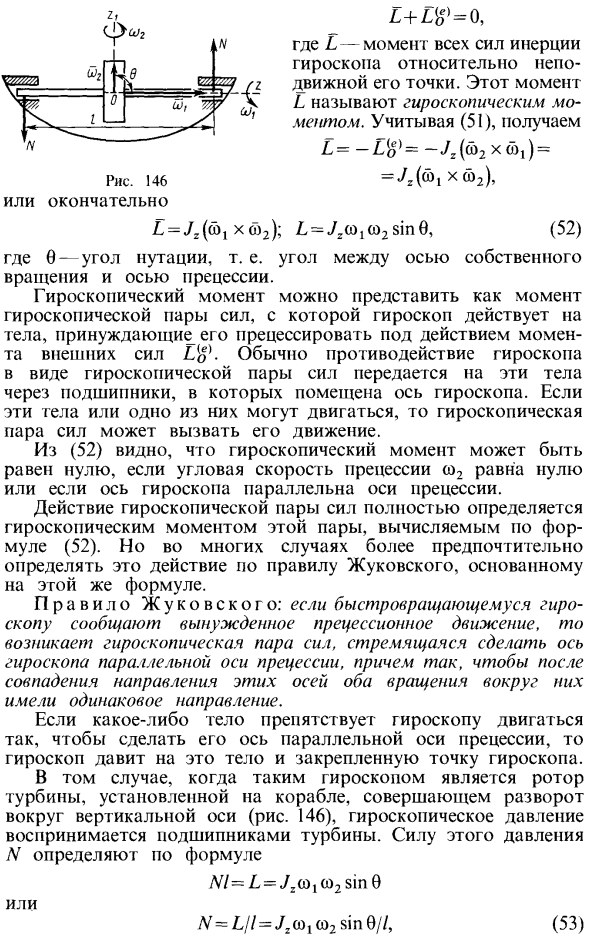
Рассчитывается по формуле, аналогичной векторной формуле Эйлера для скорости , yb = y2 x OV = a2 x Ko, Из OB = K () J2ii x. На момент внешней силы Lff, = = 22xо0 = (22×1). (51) Применение одного из результатов принципа Даламбера к гироскопу означает, что сумма векторного момента внешней силы и момента инерции точки гироскопа равна нулю. Рисунок 146 или, наконец, Где L момент всей силы инерции гироскопа относительно неподвижной точки. Этот момент L называется моментом гироскопа. С учетом счета (51) = = = , ( X cb2), = , (a X B2); Z. = JIcoIco2sin0, (52) Где 0 угол нутации, то есть угол между соответствующей осью вращения и осью прецессии.
Доказать, что в этом движении давление точки на эллипсоид изменяется пропорционально кубу расстояния от центра до касательной плоскости, проведенной к эллипсоиду в движущейся точке. Людмила Фирмаль
Момент гироскопа может быть выражен как момент пары гироскопов силы, которую гироскоп воздействует на тело, заставляя его прецессировать под действием момента внешней силы. В виде пары силовых гироскопов они передаются на эти тела через подшипники, где расположена ось гироскопа. Если эти тела или одно из них могут двигаться, пара сил гироскопа может вызвать это движение. Из (52) видно, что момент гироскопа равен нулю, если угловая скорость прецессии o2 равна нулю или если ось гироскопа параллельна оси прецессии. Поведение пары силовых гироскопов полностью определяется гироскопическим моментом этой пары, рассчитанным по уравнению (52).
Однако во многих случаях более желательно определять это действие по правилам Жуковского, основанным на той же формуле. Правило Жуковского. Когда к принудительному вращению гироскопа применяется принудительная прецессия, сила гироскопической пары проявляется так, что ось гироскопа параллельна оси прецессии, а направления этих осей совпадают. Позже оба поворота вокруг них будут в одном направлении Если есть объект, который препятствует движению гироскопа, так что гироскоп параллелен оси прецессии, гироскоп выдвигает фиксированную точку между этим телом и гироскопом. Когда гироскоп представляет собой ротор турбины, установленный на корабле и вращающийся вокруг вертикальной оси (рис. 146), давление в гироскопе измеряется подшипником турбины.
Сила этого давления N дается формулой M = = JIco1 (o2sin0 Где расстояние между подшипниками турбины. W2 угловая скорость корабля (угловая скорость прецессии); 0 кинематический угол (9 = 90 °, если рассматривается). Техническое использование гироскопа Например, рассмотрим измерение угловой скорости из множества прецессионных гироскопов, движение которых легко оценить по правилам Жуковского. Гироскоп, ось которого расположена в подшипнике на любом самолете, будет быстро вращаться вокруг этой оси. Если летательный аппарат вращается вокруг мгновенной оси с угловой скоростью 22, эта гироскопическая угловая скорость является угловой скоростью прецессии и может быть оценена по давлению гироскопа N.
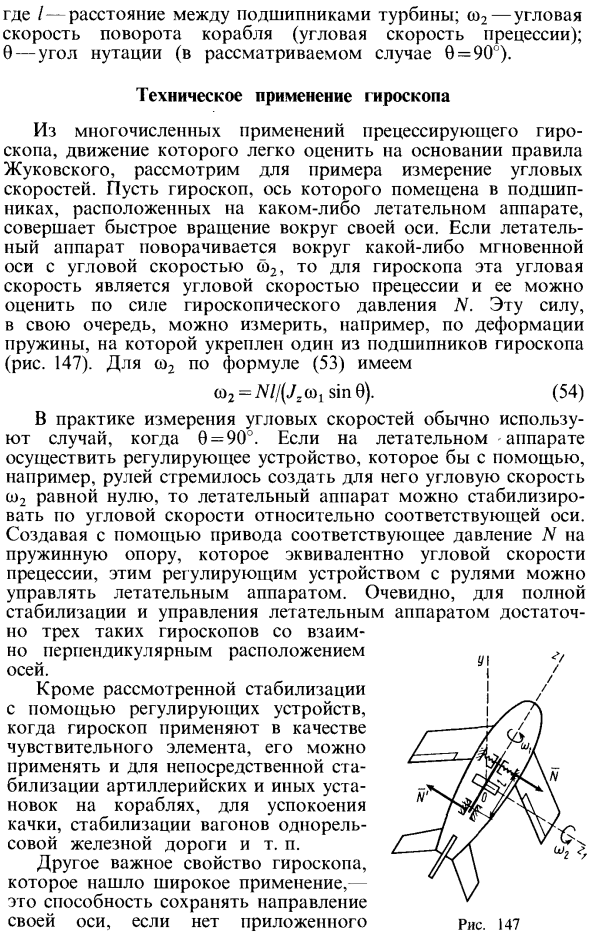
Эта сила может быть измерена, например, по деформации пружины и снабжена одним из подшипников гироскопа (Рисунок 147). Если o2, уравнение (53) o2 = N (Jzco1 sinO). (54) На практике для измерения угловой скорости обычно используется 0 = 90 °. Если, например, на летательном аппарате реализовано устройство управления, которое создает угол поворота руля, угловая скорость o 2 равна нулю и летательный аппарат устойчив по угловой скорости относительно соответствующей оси. С помощью привода этот контроллер с рулем направления может управлять самолетом, создавая давление N, соответствующее опоре пружины, соответствующей угловой скорости прецессии.
Очевидно, что для полной стабилизации и управления самолетом существуют три гироскопа с взаимно перпендикулярными осями. Помимо стабилизации, рассматриваемой с помощью регулировочного устройства, при использовании гироскопа в качестве чувствительного элемента его также можно использовать для непосредственной стабилизации обстрела судна и других установок. Другой важной характеристикой гироскопа является его способность сохранять ориентацию оси, когда он не применяется широко, хотя он широко применяется. Оборудования достаточно г 1 Рис. 147 Гироскоп в момент внешней силы.
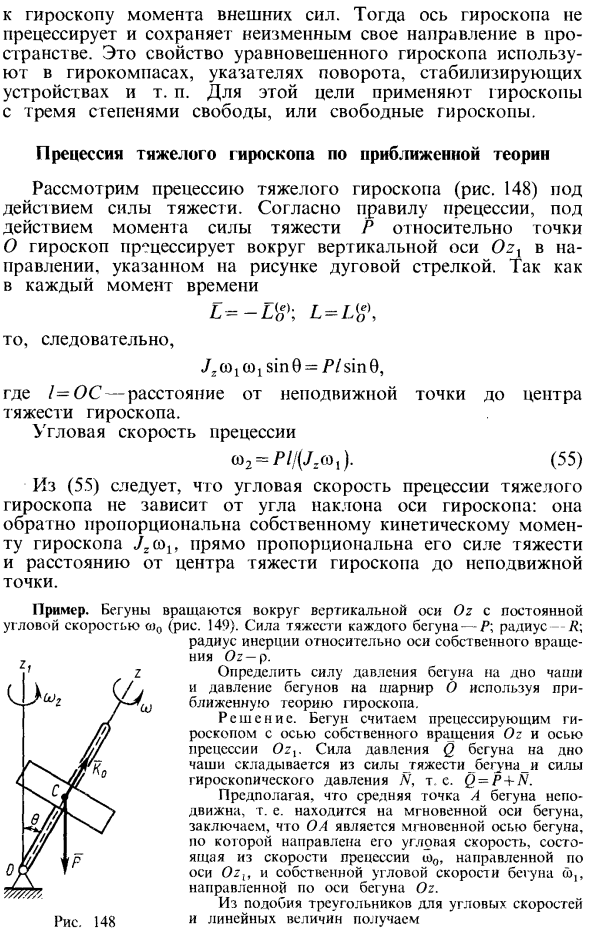
В этом случае ось гироскопа не прецессирует и не меняет направление в пространстве. Эта характеристика сбалансированного гироскопа это гирокомпас Используются поворотники, стабилизаторы и т. Д. Для этой цели используется гироскоп 3 DOF или свободный гироскоп. Прецессия тяжелого гироскопа по теории приближений Рассмотрим прецессию тяжелого гироскопа (рис. 148) под действием силы тяжести. Согласно закону прецессии гироскоп прецессирует вокруг вертикальной оси Oz под воздействием гравитационного момента P относительно точки O. Направление указано стрелкой дуги на рисунке. в любое время = ; L = L.
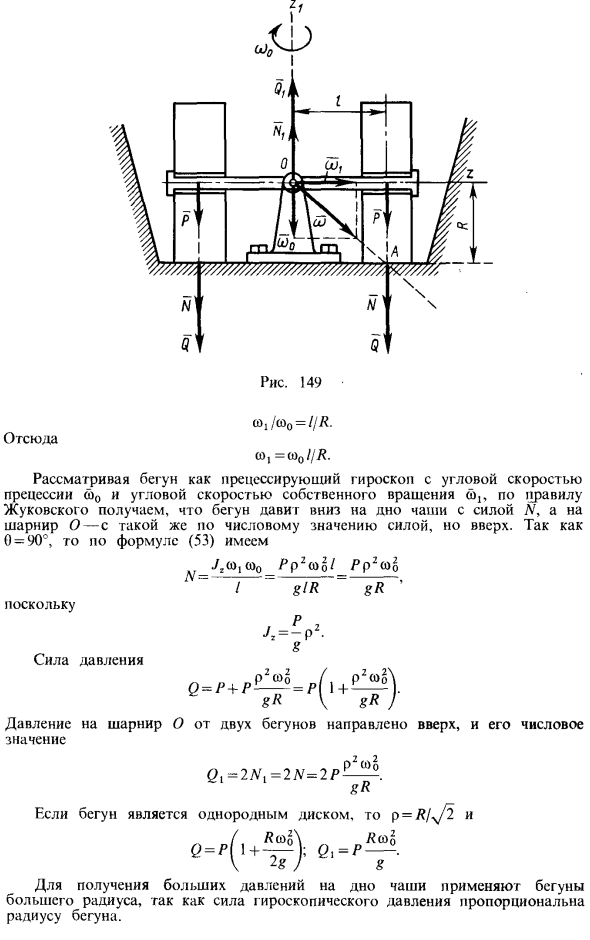
Поэтому, следовательно, Jz co, co 1 sin 9 = Pl sin 0, где l = OC расстояние от фиксированной точки до центра тяжести гироскопа. Угловая скорость прецессии 2 = W i) (55) (55) показывает, что угловая скорость прецессии тяжелого гироскопа не зависит от угла наклона оси гироскопа: Liu1 обратно пропорционален собственному моменту движения гироскопа. Прямо пропорционально расстоянию от до фиксированной точки. Пример. Бегун вращается вокруг вертикальной оси Oz с помощью машины скорой помощи под определенным углом (рис. 149). Гравитация каждого бегуна P. Радиус I; радиус инерции Oz p вокруг своей оси вращения.
Используя приблизительную теорию гироскопа, определите давление бегуна на дне чаши, давление бегуна на шарнире О. Решения. Рассмотрим бегунка как гироскоп прецессии с соответствующей осью вращения Oz и осью прецессии Ozt. Давление бегуна Q относительно нижней части гироскопического давления N, то есть Q = P + N Предполагая, что средняя точка бегуна A является стационарной, то есть на мгновенной оси бегуна, ОА это мгновенная ось бегуна, ориентированная вдоль его угловой скорости, состояния прецессии и собственной угловой скорости бегуна.
Это было 0 От подобия треугольника к угловой скорости делящегося количества, Рис. 149 Отсюда o = a , L. Рассматривая бегуна как прецессию Se ssssiaω0 и угловую скорость Уковского, бегун g: шарнир O та же формула (53) Гироскоп с угловой скоростью Up. с того времени с того времени значение Серая сфера Бегун применяет, я пропорциональна Если радиус большой, радиус бегуна.
Смотрите также:
Задачи по теоретической механике
| Астатический гироскоп | Основные допущения приближенной теории |
| Движение гироскопа под действием силы тяжести | Особенности движения оси гироскопа |
