
Оглавление:


Приближенные методы определения собственных частот колебаний упругих систем
- Приближенный метод определения Собственная частота колебаний упругой системы Путь Рэлея. Когда мы рассматриваем колебания упругой системы С одной степенью свободы, мы склонны игнорировать массу упругого элемента по сравнению с колеблющейся массой. Это произошло и в случае вертикальных колебаний груза, подвешенного на пружине (см. рисунок). 515), и для крутильной вибрации диска на оси (фиг. 523), а также для поперечной вибрации груза, расположенного на балке(фиг. 533), и в других случаях.
Во многих практических случаях эти упрощения не вносят особых погрешностей в получаемые решения, но тем не менее приближенный метод Рэлея используется для оценки влияния принятых значений частот колебаний упрощенной упругой системы на некоторые технические задачи. Аппроксимация этого метода заключается в том, что при его применении делаются некоторые предположения о расположении колебательно-упругих систем между колебаниями. Частота колебаний методом Рэлея определяется из энергетического баланса системы. Здесь мы описываем применение метода Рэлея на примере вибрации
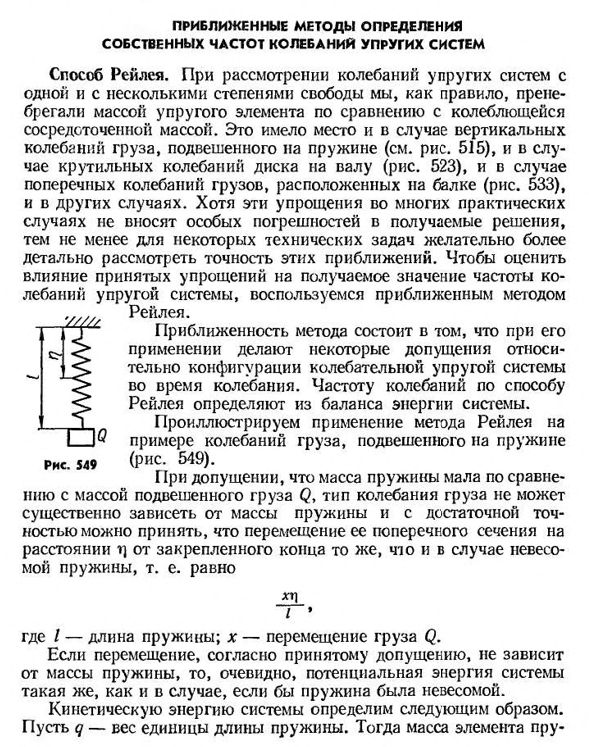
подвешенного груза в диаграмме пружины. 549 (рис. 549). Если предположить, что масса Людмила Фирмаль
пружины мала по сравнению с массой подвеса груза Q, то вид вибрации груза не может сильно зависеть от массы пружины, не обладающей достаточной точностью. 1 9 Где/ — длина пружины. x-это движение груза Q. Согласно принятому предположению, если смещение не зависит от массы пружины, то, очевидно, потенциальная энергия системы такая же, как если бы пружина была невесомой. Кинетическая энергия системы определяется следующим образом. Пусть Q вес единицы длины пружины. Тогда масса элемента пру- 578zhiny Д\будет — ^Р «, соответствующий кинетической энергии Общая кинетическая энергия пружины, очевидно, Я Два. Вт’ 1 1(dx1 2Г 1и ДТ Т 2г Рис С50 X0 fl / Два. Я Т » = ДЖ Это значение кинетической энергии пружины следует прибавить к кинетической энергии
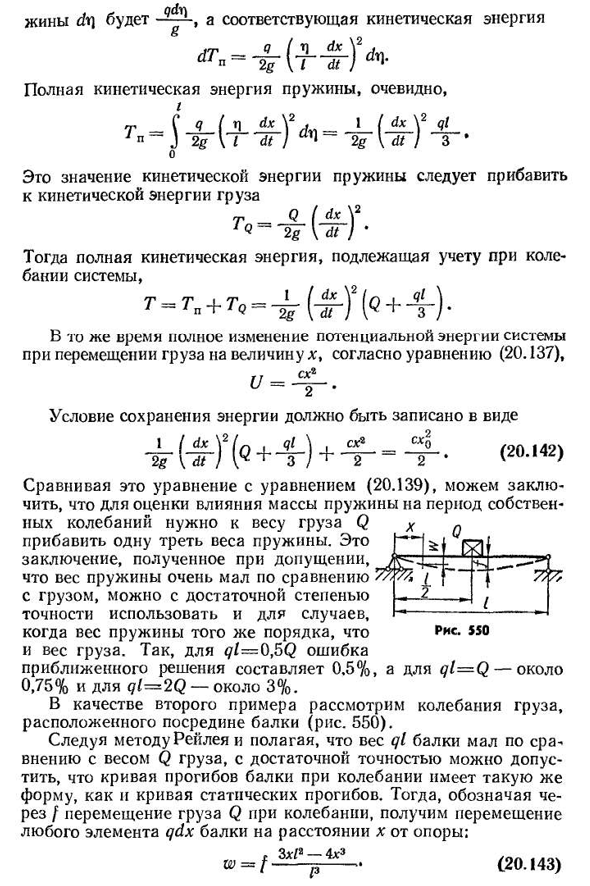
нагрузки Тонны T q_ _ _ Q (dx\2-2g \ D t) * полная кинетическая энергия, учитываемая при колебаниях системы, T-L+t, = ^ (-£ -)’ (с+4 -) — при этом суммарное изменение потенциальной энергии системы при перемещении груза со значением х, согласно формуле (20.137)), U2 * Энергосберегающее положение потребности быть написанным (20.142) Сравнивая это уравнение с уравнением (20.139), мы оцениваем влияние массы пружины на период собственных колебаний, она прибавляет одну треть массы пружины к массе груза Q поэтому при^Z=0.5 Q погрешность приближенного решения составляет 0.5%, ql=Q-около 0.75% и ql=2-3%. В качестве второго
- примера рассмотрим вибрацию груза, расположенного в центре балки(рис. 550). Предполагая, что вес груза QL меньше веса груза QL согласно методу Рэлея, кривая отклонения луча во время вибрации может быть принята с достаточной точностью такой же формы, как и статическая кривая defl. Затем, показав движение груза Q при колебании с I, получим движение любого элемента qdx балки на расстоянии x от опоры. З=ф—— =—— *• (20.143) П 19 * кинетическая энергия самого луча. Л я (ДФ ЖР-4х»\a17ql (дл г / Б», Г¥Р———- (Ф)D х~- 3 5 — — 2 О Ф и-ДТ -)* Кинетическая энергия нагрузки Т= \ o_t2G Ди)’ Тогда полная кинетическая энергия колебательной системы _ 24 — получить (20.145) Требования к энергосбережению (20.138) затем принимают вид константа. Если разделить последнее уравнение по T,、 Семнадцать. е+ » з Г О Д * Ф ДФ 2 * 24EJ Ф ДФ n2g з Л2д Т+/Г З Д т-в, После сокращения, куда мы идем Или, вводя понятие уменьшенного отклонения 6pr: X__0 0 — /8 °НП-м , (20,146) Дифференциальное
уравнение колебаний нагрузки балки с учетом ее массы можно выразить следующим образом 5 — +X G/ = = 0 * <2 0 -1 4 7 ) Поэтому, согласно формуле (20.6), частота собственных колебаний груза v), v= — 1I/2l2L в BPR из уравнения (20.146) с учетом следующего: масса балки определяется частотой или длительностью свободной вибрации следующей балки 17 Вес груза, который считается невесомым, добавляет=0,486 веса балки. Это значение называется уменьшением массы пучка. В заключение рассмотрим случай поперечных колебаний балочной нагрузки на двух опорах (см. Рисунок). 538). Предположим, что кинетическая энергия системы обусловлена только поступательным движением изделия, а потенциально только изгибом балки. Кроме того, мы полагаем, что изменение всех точек оси пучка происходит с одинаковой частотой и находится в фазе, а затем наблюдается свободное колебание абсцисс x и поперечного сечения пучка в зависимости от времени.、
Принимая во внимание, что скорость перемещения точек оси балки определяется по формуле v (x, y)=W ( * ) o) cos (erf+a), максимальная скорость записывается в Людмила Фирмаль
виде C’Max=(x), а кинетическая энергия соответствует максимальной скорости, /p_ _ ^1^1 Макс / м2 Вольт 2 макс.. ^П ^ Lамакс Джей Макс-г————‘————2 г’ * р————2———• Или t max=4-X » I, (w o2), (20.148) Z1=1 Здесь WT-амплитуда смещения поперечного сечения балки в положении сосредоточенной r-й массы. Величина максимальной потенциальной энергии изгибной деформации балки, которая находится при максимальном отклонении балки, определяется по формуле Т/Макс=4Ф в[Т^-]2 (1Х'(2 0-14 9 ) Отчет Уравнение 581 уравнения (20.148)и (20.149) дает следующее основное уравнение Рэлея для квадрата частоты: Два. Тэ=я (20.160) Для непрерывного массового распределения сумма знаменателей последней формулы заменяется интегрированием g (20.151)) При рассмотрении формула (20.150) дает приблизительное значение частоты, так как форма колебаний пучка принималась приблизительно в виде синусоиды. Если известна действительная форма колебаний W (x), то формула (20.150) дает
точное значение частоты. В общем случае уравнения функции отклонения w (K) заранее не известны и обычно должны быть установлены. При выборе формы кривой необходимо приложить усилия, чтобы хотя бы отразить форму колебаний и соблюсти рассматриваемые граничные условия (в данном случае условия опоры). На практике он определяет форму упругой линии, которая не задается формой вибрации,а задается некоторой статической нагрузкой, и принимается за форму вибрации. Этот метод удобен тем, что граничные условия всегда выполняются автоматически независимо от выбранной нагрузки. Возьмем нагрузку в виде любой системы сил RG, P^,…, RP, потенциальная энергия изгиба может быть выражена работой внешней силы.: С/=41-Т. Е.-Я WL-g-отклонение, вызванное принятой системой нагрузки. Тогда формула(20.150) принимает вид д= = л E RT. (20,152) 1″=1 Вообще говоря, для системы
сил рекомендуется принимать фактическую нагрузку P t — =T£. Затем, исходя из Формулы (20.152)、 triiWl я=н13=1 (20.153) Пример 86. Определите наименьшие собственные частоты двух опорных балок, имеющих три одинаковые массы tn(см. рис. 539). При решении этой задачи мы предполагаем синусоидальную волну.. . LX w(x) — грех—. Эта формула отвечает условиям конца луча. Фактически, при x=0 и x=I прогибающий и изгибающий моменты, т. е. w (x) 0 и — = = 0, не равны нулю одновременно угла поворота и боковой силы., для определения частоты n g0 dx3 используйте формулу (20.150). Потому что я буду?З\2 / АЛ2. ЮС \ к ДХ>)ф~ф и Н~Т / затем числитель уравнения(20.150) Чтобы определить знаменатель формулы (20.150), необходимо
вычислить величину отклонения балки в положении нагрузки, то есть величину w (x) из x=»I/5″. x=T и x » рН от WL-грех 2″И4. 9jus=А2^ — с и Н2^Т ЛК, см е ДВ и г * 0 (20 154) LH w2= = sin=sin тогда знаменатель уравнения (20.150) ’ g=m I+TA2+m I6 ф Н \И6 В J N з)4-1 Два. / Л один Я»1 А2 * (■г)=4ta2- Присвойте выражения (20.154) и (20.155) выражению (20.150), чтобы определить квадрат частоты: Y & -) CO2 — —- ———— (20.155) дуплексный A W J2Z8 — / — mcfl n4E ю тн в интернет» * * 583 частота — \/~Н*EJ5, 696t/~е / пр В-Ж-Л-В (Мне) Отметим, что значения частоты, полученные приближенным методом энергии Рэлея, мало отличаются от точных значений, полученных уравнением (20.80). Путь в Ритц. При использовании метода Рэлея делаются определенные предположения о форме линии упругих колебаний стержня. Выбор этой формы равнозначен введению нескольких дополнительных ограничений, которые приводят
сложную систему к системе, имеющей только одну степень свободы. В этом случае эти дополнительные ограничения только увеличивают жесткость системы, что дает несколько завышенное значение частоты по сравнению с фактическим значением. Более точные значения основной частоты, а также частоты высших типов колебаний могут быть получены с помощью метода Литца, который является дальнейшим развитием метода Рэлея. При использовании метода Ритца в уравнение упругих линий вводится несколько параметров, которые обозначают тип вибрации, значение которого вычисляется таким образом, что частота вибрации основного типа минимизируется. Так, например, принимая во внимание поперечную вибрацию стержня, функцию отклонения стержня подставляют в виде ряда w (x)=atw, (x)+d2sh2 (x)+•••, (20.157) и задают выражение
(20.157) для уравнения Рэлея (20.151) каждого члена, удовлетворяющего граничному условию, легко видеть, что результат зависит от выбора или, скорее, от отношений—,— и т. д.).да что с тобой такое? В 1А2 Согласно методу Литца, Эти коэффициенты следует подбирать таким образом, чтобы формула (20.151) давала наименьшее значение для частоты со. Минимальным условием является, очевидно, следующее уравнение: V Или 5 \Эдж (- г-)2Д х — ^ДХ Э J А-J МВт * ДХ=0. 0-0. 584del-это формула на Я И учитывая формулу(20.151)), получить (20.158) Рис пятьсот пятьдесят один Очевидно, что таких уравнений много, потому что в ряду (20.157) есть члены. Эти уравнения однородны и линейны по отношению к коэффициентам A19A2, A3…АП, дек. Приравнивание определителя этой системы уравнений к нулю приводит к уравнению времени —
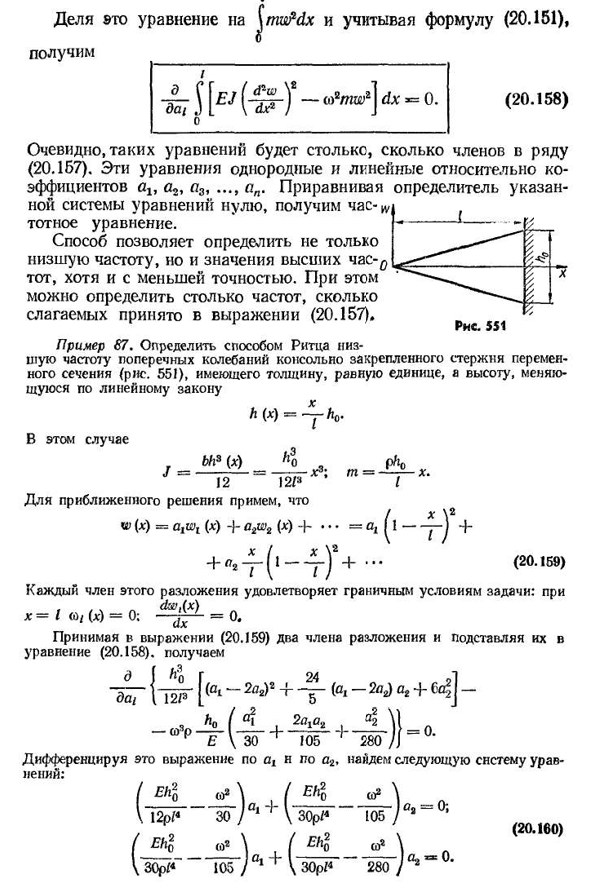
^tot. Этот метод позволяет определить не только самую низкую частоту, но и значение более высокого тактового сигнала, но точность его невелика. Таким образом, можно определить очень большое число частот и число слагаемых, принятых в Формуле (20.157)), LRC87. Определить методом Литца минимальную частоту поперечных колебаний консольно закрепленного стержня переменного сечения (рис. 551), имеющих толщину, равную единице, а высота изменяется по линейному закону Л (Х)=-У-у. В этом деле ТН=Х. = А1 2: 4 — ••• (20.159) ■Б А З (х)… И примерно так.. 12/3 * • Для приближенного решения w (x)=at wt (x) -} — a2w2 (x)4~ • • • Каждый член в этом разложении удовлетворяет граничному условию задачи: for<, h~dw.
(х)к=I с(х)=0;=0. Выражение (20.159) принимает два члена разложения и присваивает их выражению (20.158). сделать д И Л О г.. . 24. . О! ДОКТОР Пользователь — Когда это уравнение дифференцируется по Oh h с O2, мы получаем следующее уравнение: =0. Ноль четырнадцать- / (О2 \ \12П/\ » 30 / 2 = 0; Сто пять CO2 \ Л 30pZ4 280 / ^2″0. (20.160) М5 01+если уравнять детерминанты, состоящие из коэффициентов этих уравнений, до нуля, то получится частотное уравнение. 2, 66L0 П Это выражение дает погрешность 0,1%по сравнению с точным решением задачи, заданной Кирхгофом ко== » (20.161) Закон Бубнова-Галеркина. Н. Г., Бубнов и Б. b .Разработанный галеркным метод широко используется для приближенного решения различных задач статики и динамики упругих тел. Для большей наглядности рассмотрим применение данного метода на примере решения задачи поперечной вибрации стержня переменного сечения,
которая описывается дифференциальными уравнениями (20J62) Решение этого уравнения, как известно, можно получить, выразив функцию отклонения w как произведение двух функций. X-это только координата сечения. Подставляя это уравнение в уравнение (20.162), получаем два уравнения для определения функции X и функции T. Для этого сформируем Интеграл i f{[EJ (x)’G(x)]» -mw2^(x)}T (x)dx=0. (20.163) о отсюда, в частности, можно получить уравнение Рэлея(20.151). [Э J (Х) Х»(Х)1″¥(х)D х в MW2 (х)DX Если вы берете CHG (x) следующим образом T(x)=al^i(x)+a2(x)+*••(20l64)виртуальная работа, которая рассматривает каждый член(l)как возможное смещение и получает
отношение к нулевому равенству вместо равенства(20.163): [{[EJ(x)H’(x)I»-t2 (x)}H (x)=0. (20.165) для такого уравнения можно написать формулу (x), в которой принимается столько/сколько слагаемых. Каждое из уравнений (20.165) однородно и содержит неизвестные значения коэффициентов A19A2, A39… В первой степени. Если полученный таким образом определитель системы однородного уравнения (20.165) уравнивается к нулю, то получается частотное уравнение. Пример 88. Определим минимальную частоту поперечных колебаний консоли с переменным сечением по методу Бубнова-Галеркина(рис. 551), имеющих толщину, равную единице; высота изменяется по линейному закону Для приближенного решения задачи методом Бубнова-Галеркина предположим, что V (x)=C1H’1(x) — I-b4t2(x)-I.. =У1^1 — +Y2A_a Дж-я.. . Выбранная функция явно
удовлетворяет граничным условиям задачи. Вт(х)=0;^(х)=0; Когда Х=О E J%(x)=0 и E J^(x) » 0. Если вы дважды дифференцируете G (x), а затем снова умножаете Ej (x)=Xs, вы получаете Eh3 Ноль. [£J в(Х)^(Х)]»=. ми- б Подставляя полученное выражение в выражение (20.165), получаем s W i — 2а. г) х 4-6 Отчет (В-2А J х+ — 4 -)’+ Следуя этому интегралу 587, после преобразования мы получим однородное уравнение той же системы, что и по методу Литца (20.160). Уравнивая детерминанты системы к нулю, получаем уже известную формулу определения частоты(20.161).
Смотрите также:
