
Оглавление:

Принцип выбора типов и параметров рычажных передач
- При выборе рычажного механизма принцип Аббе не применяется, но в этом случае также необходимо выдерживать определенные требования, то есть соблюдать неизменность и высокую точность передаточного числа. Характерной особенностью рычажной передачи является наличие скользящего контакта в сопряженной точке между сферической поверхностью и плоскостью. Сферический отбор-планарное сопряжение предопределено тем, что такие элементы могут быть выполнены с высокой точностью. Как только тип рычага, его номер и тип шарнира определены, проблему можно считать решенной. Если сфера находится на центральной оси (рычаг со сферой), конъюгат называется синусом (синусоидальный рычаг).
Если вращающееся звено имеет плоскость, соприкасающуюся со сферой на подвижном звене, сопряжение называется касательной (касательный рычаг). В случае синусового рычага (рис. 5 = I 81P p I ( p- 3 6 + ); (6.6) Для тангенциального рычага (США 6,9, б) = 1ph I (ф + ф8 3 + ) (6,7) Следовательно, возникают систематические ошибки, пропорциональные обеим связям, но признаки этих ошибок различны. Кроме того, ошибка тангенциального рычага в два раза больше, чем синусового. Чтобы уменьшить влияние систематических ошибок, оба плеча одного и того же рычага должны быть однотипными: синус или тангенс.
На завершающем этапе формирования экспертной группы целесообразно провести тестирование, самооценку, взаимооценку экспертов, анализ их надежности и проверку согласованности мнений. Людмила Фирмаль
Сфера помещается на теоретическом рычаге в начальном положении 171, и обе плоскости параллельны теоретическому плечу рычага в этом положении и должны иметь одинаковый символ под тем же углом. Теоретический рычаг сформирован так, чтобы плечо было вертикальным, опущено от точки контакта движения. Это положение рычага считается исходным положением, а радиус обеих сфер может быть разным. По техническим или структурным причинам центр сферы в исходном положении часто смещен относительно теоретического рычага.
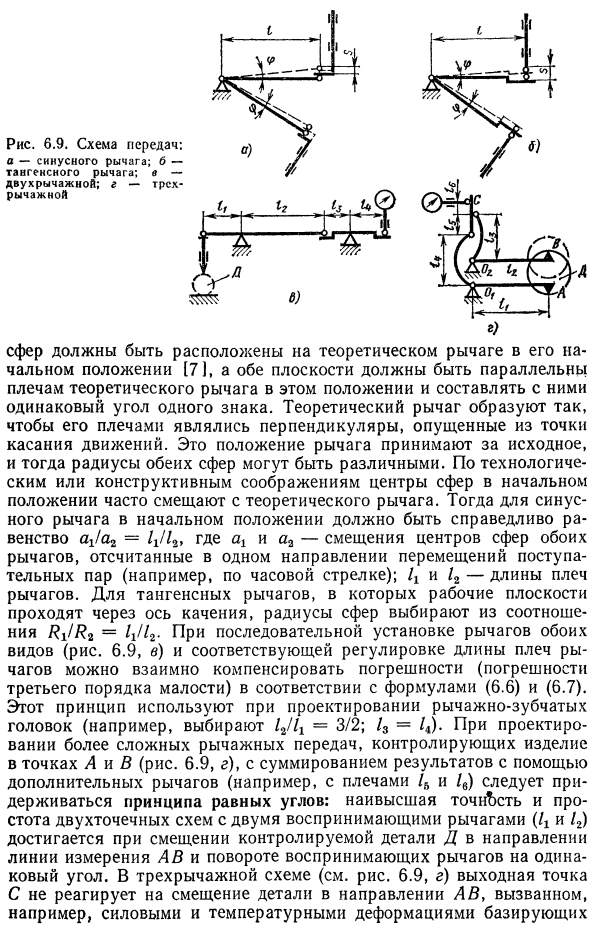
- Затем, для начального синусового рычага, уравнение a ^ ij = 1 ^ 1 ^ должно быть действительным. Где a1 и aa — смещения центров сфер обоих рычагов и учитываются в одном направлении (например, по часовой стрелке) движения поступательной пары. Используйте 4 и 4 плеча. Если рабочая плоскость представляет собой тангенциальный рычаг, который проходит через ось вращения, радиус сферы выбирается из следующего соотношения = 11 Согласно уравнениям Ig (6.6) и (6.7) Этот принцип используется в конструкции головок рычажных передач (например, выберите = 3 2; 13 = 4). Если вы разрабатываете более сложную связь, которая контролирует продукт в точках A и B (рис.
Используйте дополнительные рычаги для суммирования результатов (например, arm 6 и c) Необходимо соблюдать принцип: двухточечная цепь с двумя чувствительными рычагами (^ и 2) для максимальной точности и простоты перемещает контролируемую деталь D в направлении измерительной линии AB и перемещает чувствительный рычаг Это достигается вращением под тем же углом. В схеме с тремя рычагами (см. Рисунок 6.9, d) выходная точка C не реагирует на смещение детали в направлении AB, например, вызванное деформацией базовой силы и температуры Элемент.
Интерференционные приборы позволяют измерять параметры неровностей поверхностей, высота которых не превышает приблизительно 1 мкм. Людмила Фирмаль
Однако, если определенное соотношение рычагов сохраняется, точка контакта с измерительной головкой с добавочным рычагом является стационарной: 4 = 2; AB = OxOg и 4 ( , -4) = 1 1 — например, часто выбирают соотношение 2 2 4 = 1 2. 8 2 = 1 3; 1b 1v-1 2. Уменьшая количество промежуточных рычагов, Ceteris paribus (например, неизменное передаточное число) повышает точность трансмиссии, поэтому изготавливается мало передач с более чем четырьмя рычагами. Рычажная передача не только может гарантировать высокую точность измерений, но также имеет доминирующее распределение благодаря более широкой расчетной способности положения измерительной головки по сравнению с парой перевода.
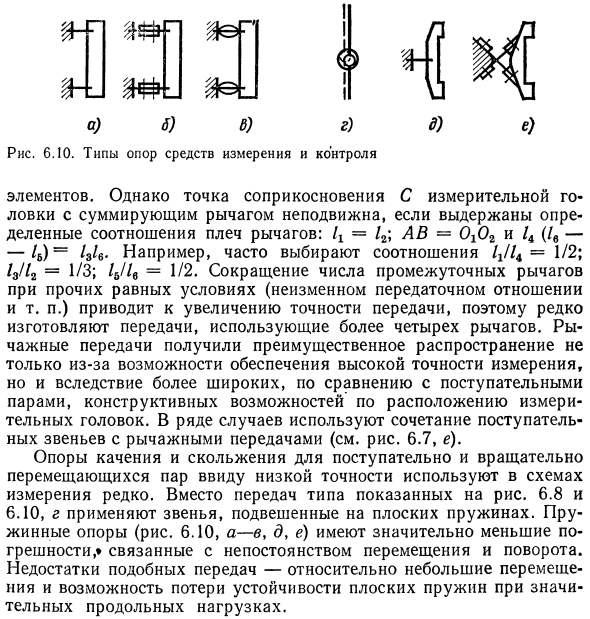
В некоторых случаях используется комбинация трансляционных ссылок и связей (см. Рис. 6.7, e). Из-за низкой точности поступательные и вращательные пары подшипников качения и скольжения редко используются в схемах измерений. Примените звенья 6.8 и 6.10 и звенья, подвешенные на листовых рессорах, вместо показанного типа шестерни. Опора пружины (рис. 6.10, a — c, e, e) имеет значительно меньше ошибок, связанных с несовпадением движения и вращения.
Смотрите также:
| Основные параметры средств измерений | Приборы с индуктивными преобразователями |
| Оптико-механические измерительные приборы | Принципы выбора допусков и посадок |
