
Оглавление:


Приведение к вектору и паре
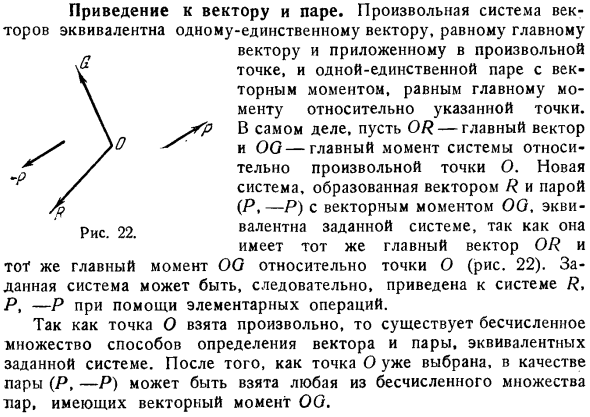
- Любая векторная система эквивалентна одному вектору, приложенному к любой точке, равной основному вектору, и одной паре с векторным моментом, равным основному моменту, связанному с заданным point. In факт, пусть о. Главный вектор и ОО главный момент системы Вектор точек O совершенно произвольный.
Любое число пар всегда эквивалентно одной паре, векторный момент которой равен сумме векторных моментов слагаемых пар. Людмила Фирмаль
Новая система, образованная парами P,—P с вектором II и векторным моментом OO, совпадает с основным вектором OP Точки то же самое основная точка GS для O Рисунок 22.Поэтому некоторые системы можно свести к системам P, P и P, используя базовые операции. Поскольку точка O берется произвольно, существует бесчисленное множество способов определения вектора и пары, которые соответствуют конкретной системе.
- После того, как точка O уже выбрана Пары P, P могут быть получены из любой из бесчисленных пар с векторным моментом GS. Если точка O берется на центральной оси Oy в точке O, то она является главным вектором O P. и главный момент O находится на этой центральной оси axis. В этом случае плоскость пары P, P будет перпендикулярна основному вектору P, а ее момент будет минимальным рис.23.
Система эквивалентна только паре, если ее главный вектор равен нулю. Людмила Фирмаль
Пары, имеющие одинаковые векторные моменты, т. Нам достаточно знать, что такое сложение осуществимо. Точка О взята произвольно, то существует бесчисленное множество способов определения вектора и пары, эквивалентных заданной системе складывается в один винт. Болл показал полезность понятия винта для кинематики и механики твердого тела. Эквивалентна лишь одной паре или только одному вектору.
Смотрите также:
Предмет теоретическая механика
| Приведение двух эквивалентных систем друг к другу | Винт |
| Пары | Взаимный момент системы скользящих векторов |
