
Оглавление:

Произвольное число вращений
- Корпус 31 вращается низко А шахта он соединен с o2 и 31 приблизительно с 31 вращающимся телом 32. Оси L3 O3 и 32 вращаются относительно O3 для выполнения основного корпуса Z3, корпус 32 соединен с Zn. Поворот ОП. Для краткости, тело 31 в то же время O2, S. C. Найти абсолютную скорость некоторой точки M, которая всегда связана с последним твердым телом Zn. Эта скорость равна основному моменту системы вектора o 1 o2, ом для точки M. поскольку это положение установлено в случае 2 вращений, достаточно указать, справедливо ли для n установить его в общем виде. Действителен для 1 вращения, затем N вращения.
Биплан, представляющий собой систему двух не перпендикулярных между собой плоскостей, взятых в определенном порядке. Людмила Фирмаль
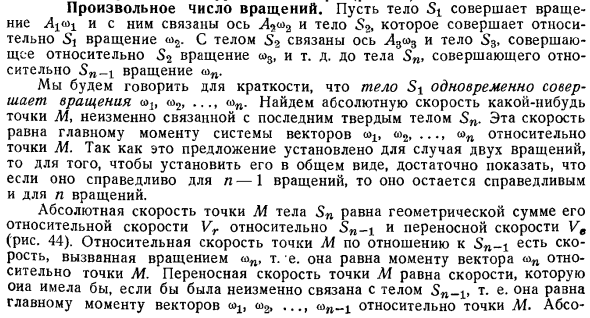
Абсолютная скорость точки M тела 5L равна геометрической сумме относительной скорости Vg до 5n x и подвижной скорости V0 рис. 44. Относительная скорость точки A4 относительно Zn x это скорость, обусловленная вращением op. то есть она равна моменту вектора op к вектору M. скорость нагружения точки равна скорости ОА, когда тело всегда связано с Zn 1 то есть это вектор, связанный с точкой o 1 22 главные моменты равны. Абсолютная скорость является результатом этих 2 моментов, и поэтому главный момент вектора, связанный с op M. скорость не зависит от порядка вращения.
- Проблемы, возникающие при аналогичной комбинации перевода путем подстановки. Предыдущее Вращательное движение сводится к прямому поступательному движению парой вращений. После установления этого, 2 я векторная система 1, 2,…. op, оригинал a x, oy, то есть Что вы можете получить от первой основной операции. Обе системы вращения, представленные этими векторами, передают в точку одинаковую скорость M. So, если учитывается только скорость, то можно заменить 1 систему векторов на другую. Вот некоторые из наиболее важных результатов, которые будут получены в результате этого: 1.Системе векторов соответствует 2 вектора, 1 из которых проходит через произвольно выбранные points.
Скользящий вектор, рассматриваемый как совокупность двух точек, взятых в определенном порядке, можно понимать как первое звено в ряде величин, образованных путем присоединения в определенном порядке не только точек, но и других простейших элементов пространства. Людмила Фирмаль
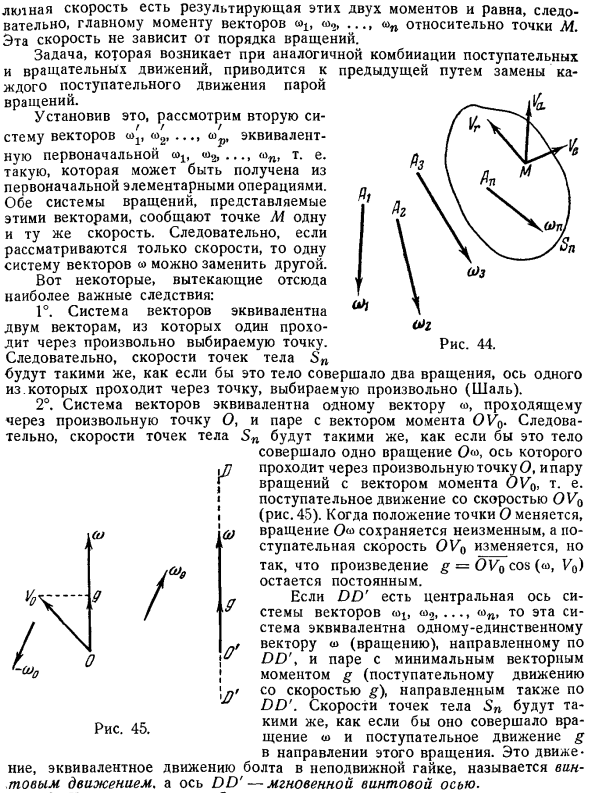
В результате скорость точек тела 8n будет такой же, как если бы это тело совершило 2 оборота, а 1 ось его пройдет через произвольно выбранную точку шаль. 2.Система векторов эквивалентна 1 вектору 0, проходящему через любую точку О, и паре моментов вектора ОУ0.Следовательно, скорость точек Тело 8н такой же, как и поступательное движение этого тела имея 1 вращение как 0 о, своей оси, проходящей через любую точку О, и пользуясь моментом вектора ОУ0 с 2 оборотов, или скорости оу рис. 45.Как О позиции изменения момента вращения не меняется и скорость поступательного движения ОУ0 изменения, поэтому продукт = oy0cos , уо остается постоянным.
Вектор системы центральной оси если, о2, op, то эта система эквивалентна одному вектору вращению и паре минимальных векторов момента поступательного движения скорости, направленных вдоль ОО. Он также контролируется OO. Скорость точки телаnn в направлении вращения такая же, как если бы она совершала вращательное и поступательное движение.
Смотрите также:
Предмет теоретическая механика
| Сложение поступательных движений | Распределение скоростей в движущемся твердом теле |
| Совокупность двух вращений | Мгновенная винтовая ось. Касательное винтовое движение |
