
Оглавление:

Решение задач на равновесие плоской системы сил, приложенных к твердому телу и системе тел
- Рассмотрим общие положения решения задачи о равновесии двух твердых тел и плоской системы сил, действующих на эту систему. Весь процесс решения задачи уравновешивания сил можно разделить на несколько этапов, которые характерны для большинства задач. Все рабочие силы должны быть приложены к выбранному телу или системе тела с учетом как активных, так и реактивных реакций. При необходимости разделите систему тела на отдельные тела или группы тел.
Если связь представляет собой абсолютно гладкую поверхность объекта, то реакция связи в этом случае направлена перпендикулярно общим контактам в точке контакта в направлении, противоположном направлению, в котором связь препятствует движению рассматриваемого объекта. Если муфта представляет собой цилиндрический шарнир, позвольте корпусу вращаться вокруг своей оси. Затем реакция шарнира, находящегося в плоскости, перпендикулярной оси, должна быть разложена на 2 неизвестные составляющие, находящиеся в положительном направлении координатных осей.
Мы видели, что Земля находится в состоянии покоя и пустота от движения на небольшой высоте почти против Земли, как будто точка находилась под действием ее абсолютного веса. Людмила Фирмаль
Если эти компоненты определены из уравнения равновесия и затем имеют знак минус, то компонент реакции направлен противоположно положительному направлению осей координат. Каждая гибкая связь трос, кабель, ремень и т. д. создает реакцию, которая граничит с гибкой связью в определенной точке. Если соединение представляет собой клемму, которая, в отличие от цилиндрического шарнира, не позволяет корпусу вращаться, то помимо 2 неизвестных компонентов реакции, в этот момент необходимо приложить некоторую силу в момент ранее неизвестного прекращения. Случай такого же соединения возможен даже при отключении системы организма.
Выявление всех сил, действующих на тело или систему тела, учитываемых, в частности, правильная замена различных типов связей их реакциями, является одним из основных этапов решения задачи равновесия. При разложении системы организма необходимо обеспечить, чтобы силы взаимодействия между телом или группой симпатической нервной системы в точках соединения были равны по величине, но противоположны по направлению. При рассмотрении системы объектов или группы из них не обязательно применять силу взаимодействия между объектами или группами системы системы, поскольку эти силы являются внутренними и не входят в уравнения равновесия системы или группы объектов.
После определения всех сил необходимо выбрать оси и точки моментов. Затем создайте условие равновесия силы в любом виде и решите полученное уравнение относительно неизвестного. При составлении уравнения решение уравнения становится проще, если к каждому из уравнений добавляется 1 новое неизвестное. Это берет точку, где пересекаются 2 искомые силы. Эта точка обычно представляет собой цилиндрический шарнир.
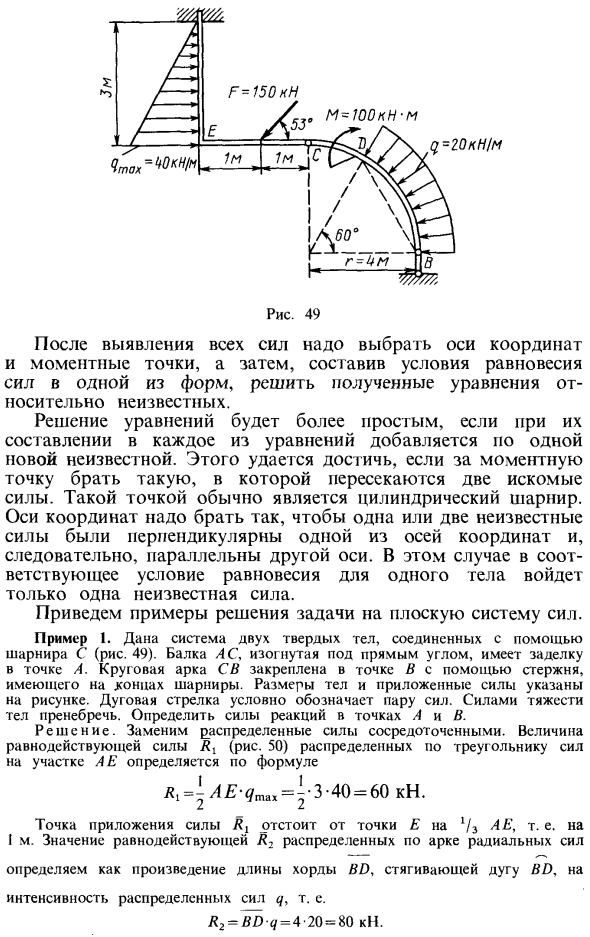
Координатные оси должны быть такими, чтобы 1 или 2 неизвестные силы были перпендикулярны 1 из координатных осей и, следовательно, параллельны другой axes. In в этом случае существует только 1 неизвестная сила, входящая в равновесие, соответствующее 1 объекту. Приведен пример решения задачи с плоской силовой системой. Пример 1.Предположим, что система состоит из 2 твердых тел, Соединенных соединением C рис.49.Балка переменного тока, изогнутая под прямым углом, герметизируется в точке A. круговая арка CB фиксируется в точке B с помощью стержня с шарниром внизу. Размеры корпуса и приложенная сила показаны на рисунке. Стрелка стрелка традиционно указывает на пару сил.
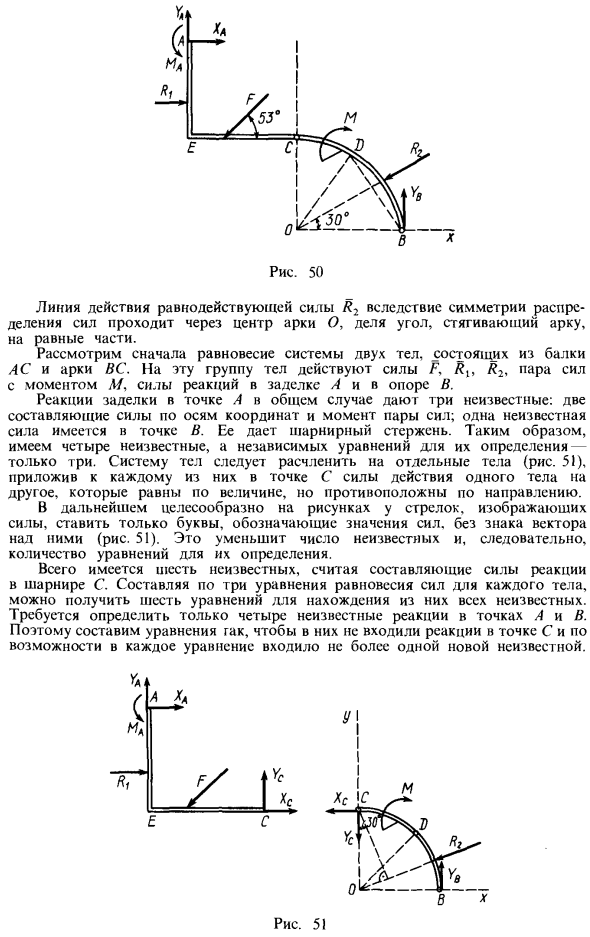
Гравитация тела игнорируется. Определить силу реакции в точках А и В. Solution. It заменяет силу рассеивания способностью концентрироваться. Величина результирующей силы H1 рис. 50 силы, распределенной по площади треугольника AE, определяется уравнением max = b3 40 = 60 кн. Точка действия I силы отделяется от точки E e AE, или I m. результирующее значение I распределяется по всей дуге радиальной силы. Определяется как Работа Созвучия Затягивает дугу BD, BD Сила рассеивания силы q, то есть N2 = BP 9 = 4 20 = 80 кн. Синтез силы обусловлен симметрией распределения сил H2 линия действия проходит через центр дуги O, разделяя угол, под которым она стягивает дугу.
- Сначала рассмотрим равновесие системы из 2 х объектов, состоящей из балки переменного тока и арки BC. Тела этой группы, Пара сил F, Rt, R2, момент M и сила реакции на терминалах A и B. Выходная реакция в точке А обычно неизвестна 2 Момент силы и силовые пары составляющих вдоль координатных осей. 1 неизвестная сила существует в точке B. Это обеспечивается шарниром Rod. So, есть 4 неизвестных, и есть только 3 независимых уравнения для их определения. Систему тела нужно разделить на отдельные тела рис. 51, причем силы одного тела действуют друг на друга в точке С.
Это равнозначно по величине, но противоположно по направлению, но на рисунке рекомендуется стрелками изображать только буквы, указывающие величину силы. Вектор без знака рис. 51.Это уменьшает число неизвестных и, следовательно, уравнение их решения. 6 неизвестных для того чтобы подсчитать компонент реактивной силы соединения C. By построив 3 уравнения равновесия сил каждого объекта, можно получить 6 уравнений, чтобы узнать из них все неизвестные. Есть только 4 неизвестные реакции, которые должны быть определены в точках A и B. Поэтому мы строим уравнение так, чтобы реакция в точке C не была включена, и, если это возможно, каждое уравнение содержит несколько новых неизвестных.
Выясните, что вы должны приложить горизонтальную силу f к корпусу Р, который перпендикулярен оси ролика, сделать его равномерным движением, и в то же время убедиться, что ролик не падает на корпус и плоскость. Людмила Фирмаль
Условие равновесия сил в виде суммы точек С. Вы также можете использовать theMoments силы У3 3 K2rcos3 Р + УВТ = 100 80 4 2 YB Где его взять Общая проекция Тело, равновесное состояние, приложенное к форме и Oy. Возьми K, Fcos53 H2sov30 = 0, YA Fsin53 Fassin30 + Yv = 0, из которых Chl = 99kN, Vl = 66kN. Для определения момента пары вложенных сил мл достаточно применить условие равновесия АС тела в виде суммы моментов сил относительно точки С. Здесь Ml = 370kN m. При дальнейшем применении необходимо определить условия равновесия CB тел Ox и Oy. И затем… Следуйте за мной. Xc F2cos30 = 0 yc F2sino3 +Гв = 0. Из этого уравнения Xc = 69 кн US = 54 кн.
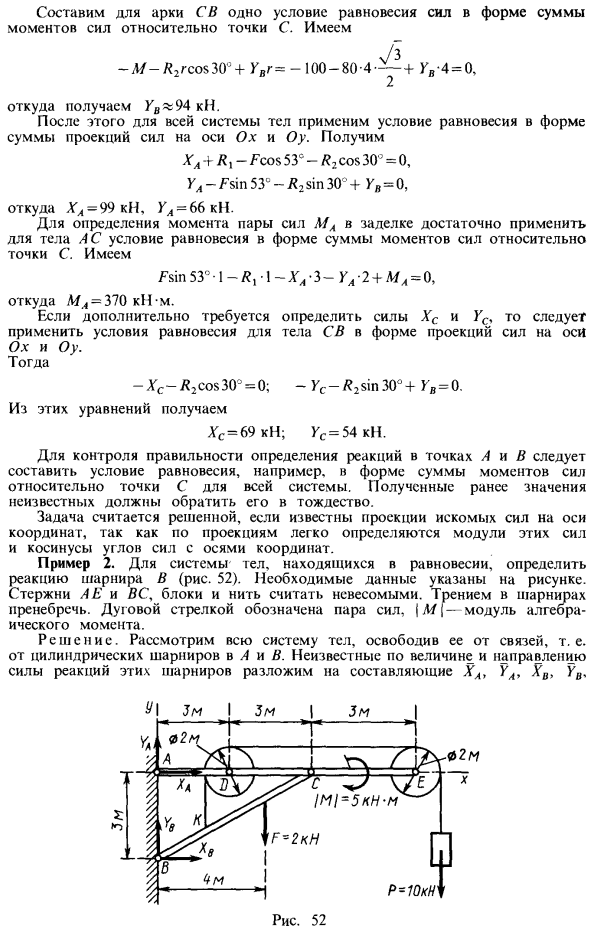
Для контроля правильности определения реакции в точке Liv, например, создают условие равновесия в виде суммы моментов для точки C всей системы. Полученное ранее неизвестное значение должно превратить его в идентичность. Поскольку косинус угла силы между этими модулями силы и координатными осями легко определяется из проекции, задача считается решенной, если известна проекция искомой силы на координатные оси. Пример 2.In в случае системы объектов, находящихся в равновесии, определяют реакцию соединения B рис.52.Необходимые данные приведены на рисунке. Шарниры Направление Rl, предохранитель, Uv Предполагая, что они в правильном направлении он направлен вдоль координат оси pos.
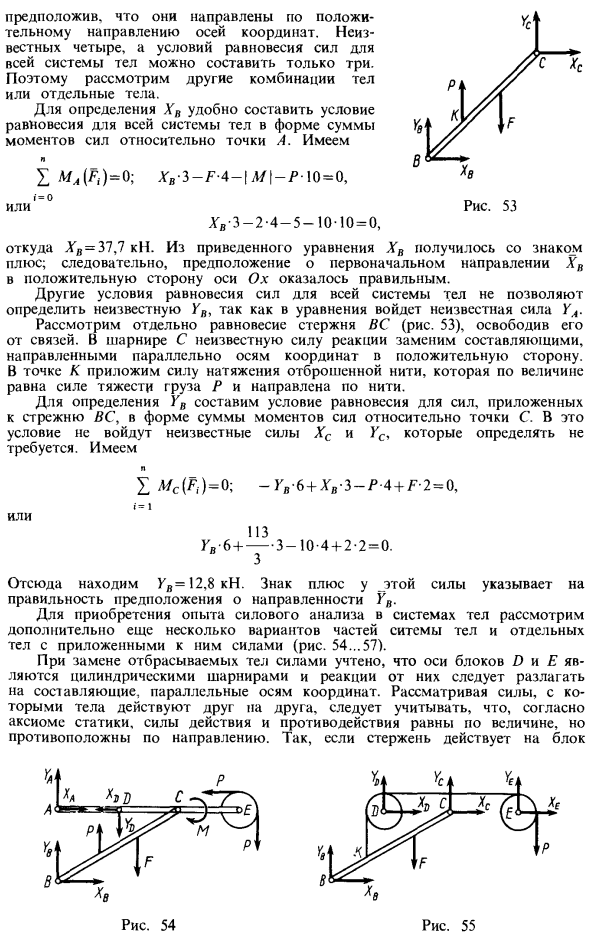
Не Известны 4 и только 3 условия уравновешивания сил всей системы организма. Поэтому рассмотрим другие комбинации тел Для определения XB удобно сформулировать условия равновесия всей системы тела в виде суммы моментов силы относительно точки L. ХВ 3 Ф 4 1л 1 П 10 = 0 ХВ 3 2 4 5 1010 = 0 Диаграмма 53 где A v = 37,7 кн. Из приведенной выше формулы Xb получился с sign m plus. As в результате было установлено, что предположение о начальном направлении Xb в положительном направлении оси Ox является правильным. В других условиях равновесия сил всей системы тела неизвестные силы Ul входят в уравнение, поэтому неизвестные UVs не могут быть определены.
Рассмотрим баланс стержня самолета отдельно рис. 53 и освободим от coupling. In шарнир с, неизвестные силы реакции заменяются компонентами, которые направлены параллельно координатным осям в положительную сторону. direction. At пункт к, прикладывает напряжение сброшенного thread. It направляется вдоль нити, равной по величине тяжести грузу P. Для определения Uv составляется условие равновесия силы, приложенной к стержню летательного аппарата в виде суммы моментов силы относительно точки C.
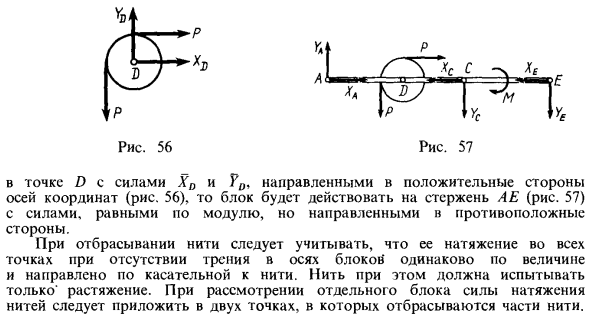
Это условие не включает неизвестные силы Xc и Us, которые не нужно определять. У нас есть A c Fi = 0 y, 6 + XB 3 P 4 + F 2 = 0 От ГББ+ 3 10 4 + 2 2 = 0 Три Диаграмма 54 Рисунок 55 Диаграмма 56 Рисунок 57 В точке D рис. 56, направляя силы Xb и Po на положительную сторону координатных осей, блок воздействует на стержень AE рис. 57 с силой, равной по величине, но направленной в противоположную сторону При отбрасывании нитей имейте в виду, что натяжение во всех точках, когда нет трения о ось блока, одинаково по величине и направлено тангенциально к оси блока. thread. In в этом случае нить должна подвергаться только натяжению.
Смотрите также:
Задачи по теоретической механике
| Параллельные силы, распределенные по отрезку прямой с интенсивностью, изменяющейся по линейному закону | Трение скольжения |
| Реакция заделки | Законы Кулона |
Если вам потребуется помощь по теоретической механике вы всегда можете написать мне в whatsapp.
