
Оглавление:

Силы инерции звеньев
- Инерция связи Из физического процесса известно, что сила инерции, действующая на каждую точку тела, определяется как Fwk = -tk ak. Где tk — масса k-й точки. ак ускорение. Для систем сил инерции могут применяться методы преобразования систем сил, рассмотренные в разделе 3.2.2. Как правило, центр тяжести звена или центр тяжести выбирается в качестве точки снижения динамики механизма.
Рассмотрим определения RK и MiC для разных типов движения звена механизма. По этой ссылке переместится Ироскалерная. Аналогичное движение выполняется, например, с помощью шатуна 2 механизма скольжения кривошипа (см. Рис. 3.3, а). Главный вектор (рис. 3.8, а) силы инерции единицы препарата прикладывается к центру тяжести С. Ks = -Mas, (3.9) Где центр ускорения силы тяжести (точка C); M = ^ jnk — масса звена.
В результате сокращения сила RH равна главному вектору силы инерции точки тела, а сила пары моментов равна главному моменту силы инерции относительно центра масс, то есть точке C: н н K = X ^ и * ~ k = \ k * \ n к = 1 Людмила Фирмаль
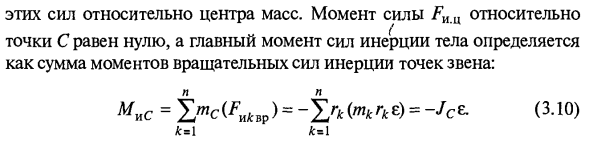
Чтобы определить основной момент силы инерции, разверните силу инерции в любой точке D вращения FKBp -ma1 = tr \ e |. А центрифуга / uz = w «= mrw2 (рис. 3.8, а). Определить момент Эти силы в центре тяжести. Момент силы FH C Точка C равна нулю, а главный момент инерции объекта определяется как сумма моментов инерции вращения точек связи. Мера =) = (TKKG) = — / SE (зло) £ = 1 £ = 1
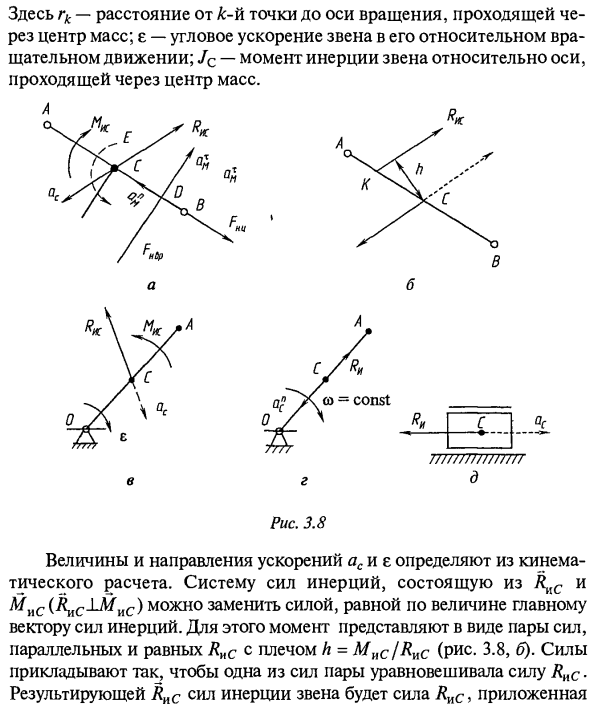
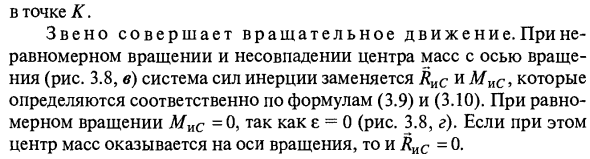
Где rk — расстояние от k-й точки до оси вращения через центр тяжести. е — угловое ускорение звена в относительном вращательном движении. / s — момент инерции звена относительно оси, проходящей через центр тяжести. 777777777777777777 CD = COnst Рисунок 3.8 Величина и направление ускорения ac и e определяются из кинематических расчетов. Система сил инерции, состоящая из RnC и MiC (/ ^ CJJ / MC), может быть заменена силой, равной по величине главному вектору силы инерции.
- По этой причине моменты представляются в виде равных сил с плечами, параллельными RhC с h = MiC / Lis (рис. 3.8, б). Сила применяется так, что одна из сил пары уравновешивает силу RuC. Результирующие силы инерции звеньев и C представляют собой приложенные силы LiS.
В точке К Ссылка вращается. В случае неравномерного вращения и расхождения между центром масс и осью вращения (рис. 3.8, в), система сил инерции заменяется на R c и ^ ic>, определяемые уравнениями (3.9) и (3.10) соответственно.
Для равномерного вращения eC = 0 и MiC = 0 (рис. 3.8, г). В этом случае, если центр тяжести находится на оси вращения,Ссылка переводит (рис. 3.8, д). Это движение осуществляется с помощью ползуна кривошипно-шатунного механизма и возвращает ведомый кулачковый толкатель. В этом случае e = 0 и MiC = 0. В случае неравномерного движения сила инерции уменьшается до основного вектора, определяемого уравнением (3.9).
Смотрите также:
| Преобразование системы сил. Условия равновесия | Кинетостатический расчет плоских рычажных механизмов. Уравновешивающие силы и момент |
| Силы трения | Уравновешивание вращающихся звеньев |
