
Оглавление:

Кинетостатический расчет плоских рычажных механизмов. Уравновешивающие силы и момент
- Расчет кинематики механизма плоского звена. Сбалансированная сила и момент Метод кинематики и статики основан на принципе Даламбера, и если сила инерции применяется к данной силе, на которую действует сила инерции, движущуюся связь можно считать неподвижной. Предположим, что приведены схема движения и размеры всех звеньев механизма, закон движения ведущего звена, масса звена, внешняя сила, действующая на звено, и сила инерции. Основная задача расчета силы механизма заключается в определении силы, действующей на кинематическую пару, и нахождении силы и момента баланса.
Действие всех сил в механизме в этом положении Момент движущей силы, которая уравновешивается, называется моментом равновесия (Mu = ML). Этот момент действует на тягу привода со стороны двигателя, уравновешивая все силы, приложенные к тяге механизма, и обеспечивает вращение вокруг оси тяги привода. Чтобы определить неизвестный отклик и баланс силы и момента, вы можете применить метод планирования силы (графическое решение уравнения равновесия (3.3)).
Сила, которая перемещает ведущее звено механизма в рассматриваемом положении и уравновешивает действие силы, приложенной к механизму, называется силой баланса (Fy = Fa) Людмила Фирмаль
Мобильность позволяет создать план форсировки нуля кинематической цепи. В силовых исследованиях механизм предварительно делится на структурные группы с нулевой подвижностью (fV = 0). В этом случае поведение разорванного звена во время отключения механизма заменяется силой реакции. Расчет силы связан последним в процессе создания механизма структурной группы и заканчивается расчетом ведущего звена.
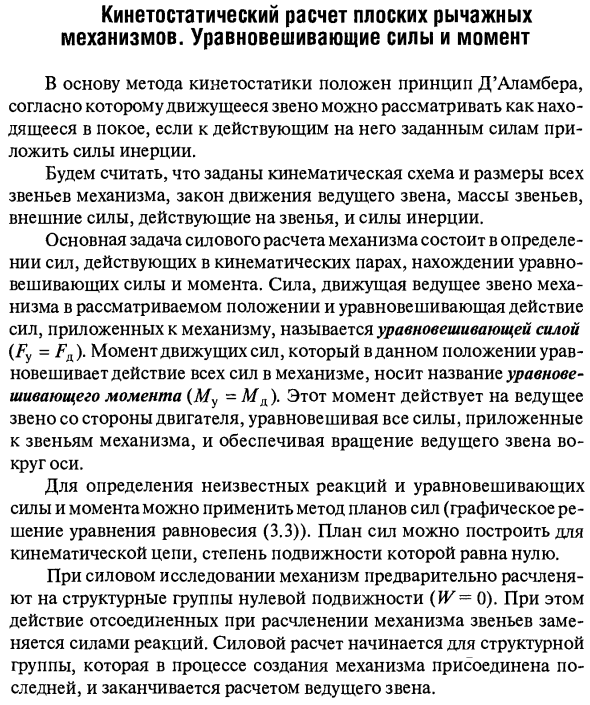
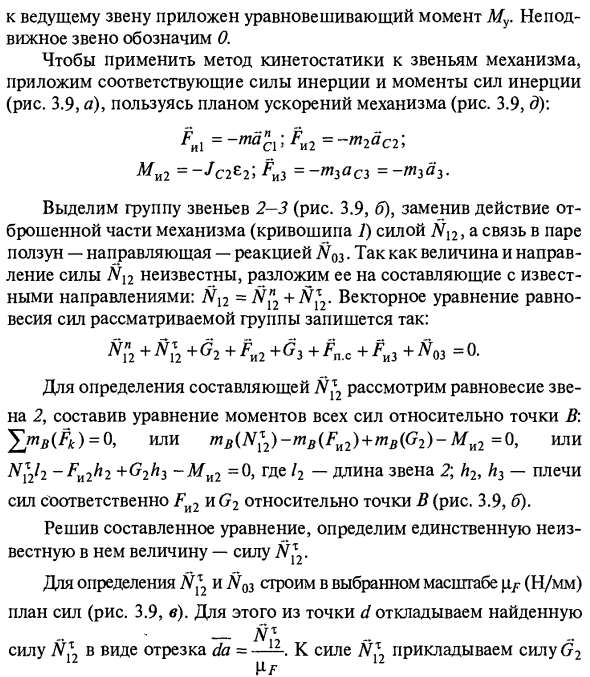
Рассмотрим расчет силы на примере кривошипно-шатунного механизма с равномерно вращающимся ведущим звеном 1 (рис. 3.9, а). На звено механизма влияет сила тяжести (Gh G2, G3), приложенная к центру тяжести звена. Полезная сила сопротивления Fnc приложена к рабочему звену 3. Установить рабочий механизм Момент равновесия Mg приложен к предыдущему звену. Фиксированная ссылка обозначена 0. Чтобы применить кинематический статический метод к звену механизма, используйте план ускорения механизма (рис. 3.9, д) и примените соответствующую силу инерции и момент инерции (рис. 3.9, а). = -mdcv Kr — = — m1 <> c2 \ mi2 = -JC2 * 2 \ = ~ tzasz = -ma3
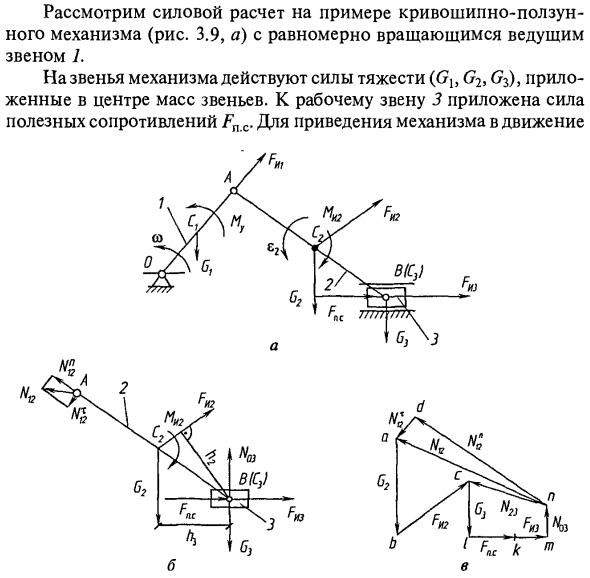
- Выберите ссылку 2-3 группы (рис. 3.9, б) и замените оставленную часть механизма (кривошип 1) силой Nn> и комбинацией ползун / направляющая пара с реакцией N03. Поскольку величина и направление силы Nn неизвестны, она разбивается на компоненты с известными направлениями. Векторное уравнение для баланса сил группы Nl2 = + записывается в виде + ^ 12 + д? 2 + Kr + Fn, + 4z + # oz = 0 Чтобы определить компонент Nf2, создайте уравнение для всех силовых моментов вокруг точки B с учетом равновесия звена 2: ^ jnB (Fk) = 0 или mB (N ^) — мБ (Fu2 ) + МБ (G2) -M% a = 0 или Nxnl2 -Fil2h2 + G2h2 -Mi2 = 0, где 12 — длина линии 2. H3 — плечо силы, Fh2 и G2 для точки B (рис. 3.9, б).
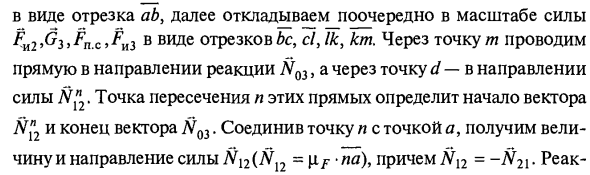
Завершите определение Nf2 и iV03 и выполните сборку на основе выбранного масштаба} iF (Н / мм) План питания (рис. 3.9, в). Для этого отложите найденный из пункта d — Сила jV.x2 в виде сегмента da = -. Применить силуб к силе Nf В виде сегмента ab, затем с помощью шкалы силы Fu2, G3iFnC9FHз, сегменты be, s /, Ik, km попеременно откладываются. Через точку Аль Прямо в направлении реакции N03, в направлении силы через точку d-. Точка пересечения n этих линий определяет начало вектора N «2 и конец вектора N03. Соединяющая точка n указывает на точку a, величину и направление силы N \ 2 (Nl2 = где Nn = — # 21 ,
Решив синтезированное уравнение, определите в нем единственную неизвестную величину-силу Nfr. Людмила Фирмаль
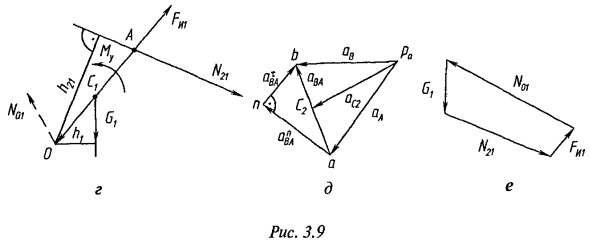
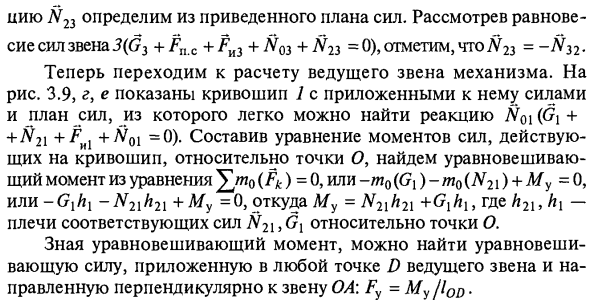
Определить N23 из данного плана силы. IV23 = -Nn- с учетом баланса сил блока 3 (6 г + Fuc + Fm3 + N03 + # 23 = 0) Далее приступим к расчету основных звеньев механизма. На рисунках 3.9, d и f показан план силы, приложенной к кривошипу 1, и силы, позволяющей легко найти реакцию N0l (64 + + # 21 + ^ ,, 1 = 0) силы, действующей на кривошип.
Уравнение момента было отредактировано для точки Oh, найдите момент баланса из уравнения ^ Гm0 (Fk) = 0 или -m0 (Gi) -m0 (N2i) + Му = 0 или -Glhl -N2 \ h2 \ + My = 0, тогда Му = N2 \ h2l + Glhll, где h21, h \ — плечи соответствующих сил N2 \, G \, соответствующих точке O. Зная момент равновесия, вы можете найти равновесную силу, приложенную к любой точке D предыдущего звена и направленную перпендикулярно звенью ОА: Fy = My / l0D.
Смотрите также:
| Силы трения | Уравновешивание вращающихся звеньев |
| Силы инерции звеньев | Вывод уравнений Лагранжа второго рода |
