
Оглавление:

Вывод уравнений Лагранжа второго рода
- Вывод лагранжевых уравнений второго рода Ранее предполагалось, что закон движения предыдущего звена известен, а скорость звена постоянна. Фактически, кинематические параметры механизма являются функцией внешних сил, действующих на массу звена механизма и подвижного звена. Чтобы определить действительный закон движения ведущего звена механизма, необходимо создать уравнение движения для механизма и решить его для нужных параметров движения.
Механизм движения звена ограничен существующими соединениями. Не все координаты точек привязки являются независимыми. В случае механизма положение точки связи с известным размером определяется установкой только независимых обобщенных координат. Обобщенные координаты называются независимыми значениями любого измерения (м, рад, …) и могут представлять положение (механизм) любой точки в механической системе.
Простейшим и наиболее удобным способом определения механизма уравнения движения является решение уравнения движения Лагранжа в обобщенных координатах. Людмила Фирмаль
Их число представляет собой номер подвижности W механизма, то есть степень свободы. Указывает обобщенные координаты qb q2f qw. Поскольку звено механизма изменяет положение во времени, обобщенные координаты, которые определяют положение, зависят от времени: q-q (t). Обобщенная скорость и ускорение определяются , dq t d2q Когда q = -, q = —J. L dt2
Например, для кривошипно-шатунного механизма с подвижностью W -1 (см. Рис. 1.7) смещение ведущего звена считается обобщенной координатой. Для Leading Link-Crank 1 угол поворота выбирается для обобщенных координат. q = (p |, а обобщенная скорость и ускорение равны q = φ! = coj и q = φ! = £ | соответственно. Этот механизм используется для преобразования возвратно-поступательного движения во вращательное движение Если это ползунок 3 ведущего звена, для обобщенных координат получите движение ползуна q = xc, обобщенная скорость и ускорение будут равны q = = и q = £ 3 =.
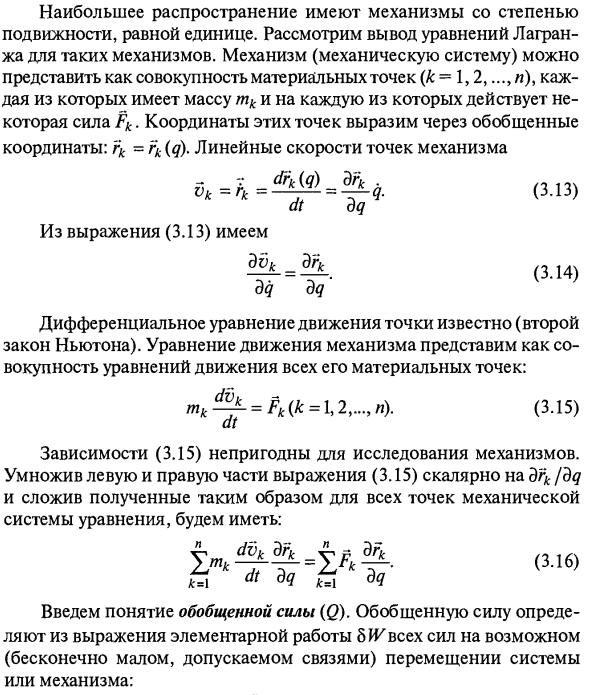
- Наиболее распространенным является механизм с мобильностью, равной единице. Рассмотрим вывод уравнения Лагранжа для такого механизма. Механизм (механическая система) может быть представлен как набор точек массы (k-1,2, l), каждая из которых имеет массу mk, и на каждую действует определенная сила Fk. Координаты этих точек выражаются в виде обобщенных координат rk = rk (q). Линейная скорость точки механизма 6k = tk =! М = * Ки. (S), дт дк Из уравнения (3.13) DUK _ DGK dq dq (3.14) Дифференциальное уравнение движения точки известно (второй закон Ньютона).
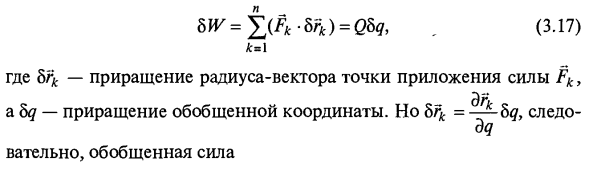
mk ^ — = Fk (k = 1,2, …, «). (3.15) в Зависимости (3.15) не подходят для изучения механизмов. Умножаем левую и правую части уравнения (3.15) на скаляр drk / dq и добавляем полученное dq ко всем точкам в механической системе уравнения: (316) Th dt dq £ dq Вводя понятие обобщенной силы (Q). Обобщенная сила определяется из формулы основной задачи 5 ^^ для всех сил на возможное (бесконечно малое, разрешенное соединением) движение системы или механизма.
Уравнение движения механизма представляется в виде набора уравнений движения для всех его важных моментов. Людмила Фирмаль
biV = ^ (Fk-brk) = Qbqt, (3.17) Где 5rk — приращение радиус-вектора в точке действия силы Fk. a bq — обобщенное приращение координат. Но б ^ = ^ -5 * 7, так дк Обобщенная сила Обобщенная размерность силы зависит от обобщенной размерности координат. \ o \ = mp Преобразуйте левую часть уравнения (3.16), используя уравнение (3.14). mp dvk dri d ^ dg-d dgk = ± Xm B v dbk-d e y «** 5 * e y» * «* DTZ. * до d до b до dq dt qb 2 dd ^ 2 ‘ Total ^ Γ = K — кинетическая теория Опишите энергию (механизм) системы и уравнение движения (3.15) системы в виде единого уравнения с обобщенными координатами следующим образом: д дк дк = Q. (3.18) дт дк дк Для механизма с подвижностью больше 1 число уравнений (3.18) и число обобщенных сил равно числу обобщенных координат.
Смотрите также:
| Кинетостатический расчет плоских рычажных механизмов. Уравновешивающие силы и момент | Кинетическая энергия |
| Уравновешивание вращающихся звеньев | Обобщенные силы механизмов |
