
Оглавление:

Стандартизация изделий и сборочных единиц по негеометрическим параметрам
- Стандартизация упругих элементов (пружин, мембран и т. Д.) Обеспечивает совместимость как по размерам соединения, так и по характеристикам, которые представляют собой зависимость торца пружины или смещения (деформации) рабочего центра другого элемента от приложенного усилия. , Оптимальные значения параметров и стабильность свойств упругого элемента зависят от точности размеров и формы, механических свойств материала, структурных и технических факторов.
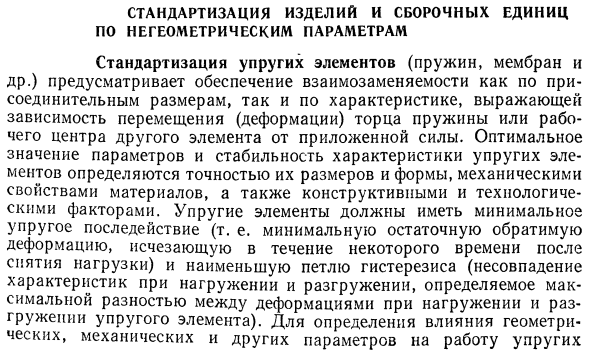
Эластичные элементы имеют минимальное упругое последействие (т. Е. Минимальную остаточную обратимую деформацию, которая исчезает на некоторое время после разгрузки) и минимальную петлю гистерезиса (свойство во время загрузки и разгрузки определяется максимальной разницей между деформацией во время загрузки и разгрузки) Несоответствия и эластичность) предметов, которые нужны). Определить влияние геометрических, механических и других параметров на упругую работу Рисунок 3.10. Пружина предохранительного клапана: р е) Элементы используют соотношения, полученные из расчета этих элементов на прочность и жесткость. Пример.
При механическом сжатии максимальная прочность соединения достигается при низкой шероховатости, а при высокой шероховатости достигается при охлажденном или нагретом узле. Людмила Фирмаль
Рассмотрим клапан с пружиной сжатия (рис. 3.10, о). Для длины сжатой пружины H = 8,5 мм показатель движения — сила упругости P (рис. 3.10, c) должна быть постоянной и равной (1 ± 0,1) Н. Пружины, работающие с регуляторами давления и чувствительными элементами, например измерительными приборами, должны обеспечивать определенную зависимость от деформации силы упругости, например, для создания постоянного градиента упругих свойств (рис. 3.10, d) Рассматриваемые пружины (статическое движение) рассчитываются в соответствии с максимальной воспринимаемой нагрузкой на основе допустимого напряжения.
Напряженная зависимость силы Р, действующей на пружину P = 6 M (8RZO, Где 0 — модуль сдвига (в данном случае C = 78,5 + 1-5 * ГПа; d — диаметр проволоки (d = 0,3 * ° мм), X = I — Hx , H — свободное состояние (H = 15 ± 0,7 мм); H — длина пружины под нагрузкой (H = 8,5 ± 0,7 мм); O — наружный диаметр пружины (b = 4,3 °, a мм); О0 — средний диаметр пружины ( О = О — ; = 3,9 ± 0,1 мм, О0max = 4,3-0,3 = = 4,0 мм; O0 m1n = 4,14-0,34 = 3,8 мм); 1-число рабочих оборотов ( = 9 ± 0,25). Среднее значение рассчитанной силы упругости пружины получено по уравнению (3.8) с учетом среднего значения параметра: PCP = 79,28-0,32 -6,5-10- (8-3,93-9-10- ) = 1,26 Н, Это на 26% больше, чем установлено.
Это несоответствие между указанным средним осевым усилием и средним значением упругого усилия является одной из причин отклонения пружин. Предельное значение силы пружины P пружины является функцией независимых переменных O, O0, , то есть P = P (O, A, X, Po, ). Предельная ошибка, — * абсолютное значение средней силы эластичность (3.9) Подстановка значения частной производной в уравнение (3.9) дает 4 № .. ZS4CH Яп. (И ** .. 1 0 * + 8P ^ D, + 85§Ha * — (3.10) Разделите обе части уравнения (3.10) на значение P, рассчитанное по уравнению (3.8) И что: ДХ = ДЯ также был принят, поэтому относительные отклонения Д Р4ДЯЗДО0, ДОД , ДЯ-57 — + — 0Г + 5Г (311) откуда DRa = P4 Dy a = 1,00-4-0,02 0,32 = 0,25 Н; ДР0о = РЗДР Рд = 1,00-3-0,1 3,9 = 0,08 Н; DR0 = P DO 6 = 1,00-0,78 19,28 = 0,01 Н; DR (= P DOYA = 1,00-0,25 9 = 0,03 Н; DRn = P ON = 1,00-0,7 6,5 = 0,11 Н.
- Общее отклонение силы, действующей на пружину, определенное методом максимума и минимума, равно сумме относительных отклонений всех параметров. DR = 0,25 + 0,08 + 0,01 + 0,03 + 0,11 = 0,48N. Отклонение LRd является систематическим, а отклонения других параметров являются случайными. Расчетное общее отклонение силы P (при k = 1) При симметричном расположении отклонений параметров погрешность предела силы упругости DRg rh wn, = 0,11 Н; ct ss = 0,39 Н, возможны положительные и отрицательные случайные отклонения от среднего значения R, поэтому дисперсия силы пружины равна Значительно превышает установленный допуск 0,2 Н. Поскольку ошибки DR и DR 5 являются систематическими, их можно уменьшить, подставив фактические значения для размера проволоки и модуля материала в уравнение (3.8). G, чтобы уменьшить оставшуюся ошибку.
Используйте метод Н. Фролова 17 , чтобы откалибровать пружину с упругими свойствами, изменив количество свободных и плотных витков пужина. Когда требуется особенно высокая точность, если в конструкции механизма используется несколько одинаковых пружин, используется селективный метод их получения. Стандартизация небольшого двигателя постоянного тока, который возбуждается независимо от постоянного магнита (П. И. Буловский). Для этого двигателя основным показателем качества является частота вращения якоря. Погрешность частоты вращения якоря двигателя зависит от следующих функциональных параметров: Уменьшение переходного напряжения щетки D (f; число проводников в обмотке якоря 0; поток в зазоре.
Точнее, чем больше модель соответствует измеряемому объекту или исследуемому явлению, тем точнее будет измерительный эксперимент. Людмила Фирмаль
Зависимость между параметром функции и индикатором работы n = ((( — I-ДУщ) а601 (рФ о), (3.12) Где I — напряжение двигателя. -Ток обмотки якоря; a — количество пар параллельных ветвей обмотки якоря. р — число пар полюсов двигателя. Явный параметр Y = 27 В; I-0,38 A, a = 2; p = 2 и пределы отклонения функциональных параметров: = (1,5 ± 0,5) В; число витков o = 2700 ± 9; F = Данные, определяющие предельные значения = (0,534-10 ± 240-10 ) Wb. Из этих функциональных параметров: Rascher = 20,25 Ом; Msh = 18,75 Ом; ДУшшах = 2 В; ДУЩШ1П = 1 В; Проверка = 2709; = 2691; shah = 0,558-10 Wb, FSh = 0.510-10 Wb. Определите максимальные и минимальные пределы для индикатора работы (все функциональные параметры уменьшены).
Номинальное значение индикатора движения соответствует номинальному значению параметра функции. (27-0,38-19,5-1,5) 2-60 ном 2-0.534.10 -2700 ° IN Допуск производительности Tn-lsh1 x-lsh1n = 8252-6868 = 1384 минуты *. Предельное отклонение производительности Japver = mn — nom-8252-7528-724 мин * Следовательно, показатель качества работы электродвигателя Эти отклонения могут быть уменьшены путем уменьшения зазора, который влияет на амплитуду магнитного потока, или путем применения предварительной сортировки щетки в зависимости от значения переходного сопротивления, которое влияет на D1 W.
Общее отклонение силы, действующей на пружину, определенное методом максимума и минимума, равно сумме относительных отклонений всех параметров. DR -. Общее отклонение силы, действующий на пружине, определенное методом максимума и минимум, равно сумма относительных отклонения все параметры DR.
Смотрите также:
