
Оглавление:

Теорема об изменении кинетической энергии
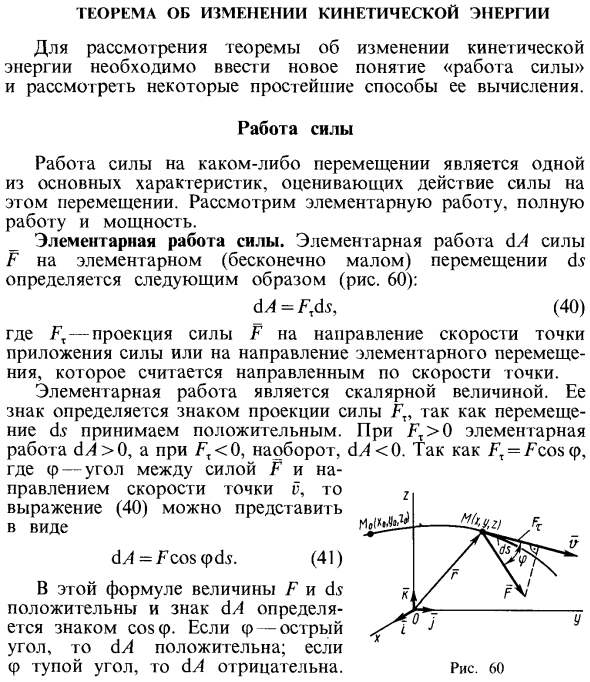
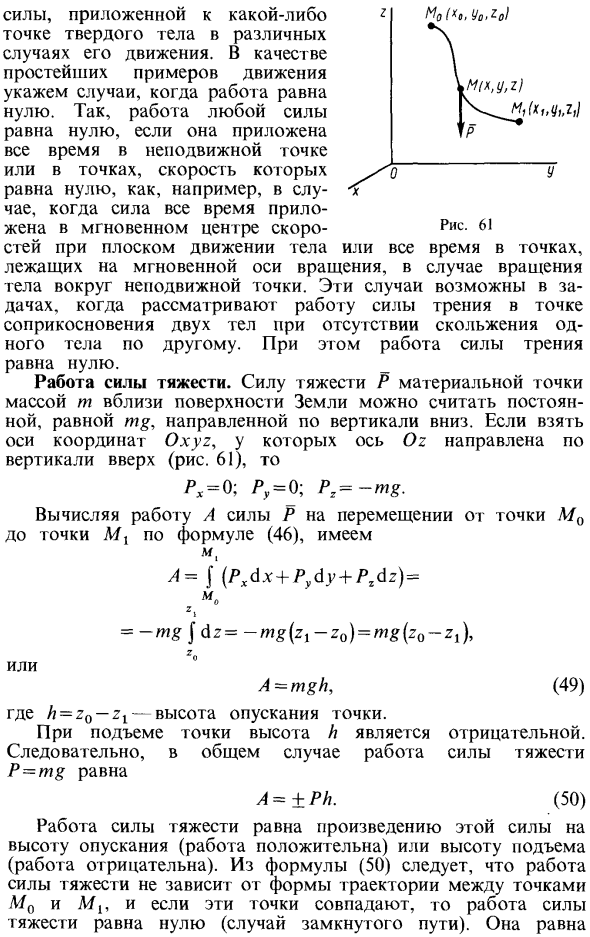
- Чтобы изучить теорему об изменениях кинетической энергии, нам нужно ввести новое понятие «работа силы» и рассмотреть несколько простых способов ее вычисления. Силовая работа Воздействие силы на любое движение является одной из основных характеристик, которая оценивает влияние силы на это движение. Подумайте о работе в начальной школе, идеальной работе, власти. Основная работа власти. Основная работа dJ силы F против базового (бесконечно малого) смещения ds определяется следующим образом (рис. 60). д / л = F, дс, (40).
Где F — проекция силы F в направлении скорости точки приложения силы или в направлении базового смещения и считается ориентированной вдоль скорости точки. Основная работа — это скалярное количество. Поскольку смещение ds предполагается положительным, его знак определяется знаком проекции силы F. Для Fr> 0 основная работа bL> 0, для F <0, и наоборот, dJ <0. F, = Fcos = | α | = ds / d /. Следовательно, ds = | dr | = t) dz. Тогда, согласно (41), начальная школа работает d / l = F | dr | cos cos (rxF) dt = roA / 0dt = ®dtA / 0cosa rxF = M0 (F) = M0 — момент силы для точки O. Если Af0cosa = Mz — момент силы вокруг оси вращения Oz, а = p0-yhh, таким образом = Fvdt = F-води + F (wxr) dt.
Если есть последовательность поступательных движений тела, то первое из них относительно переносных секунд,а это второе относительно переносных секунд. Людмила Фирмаль
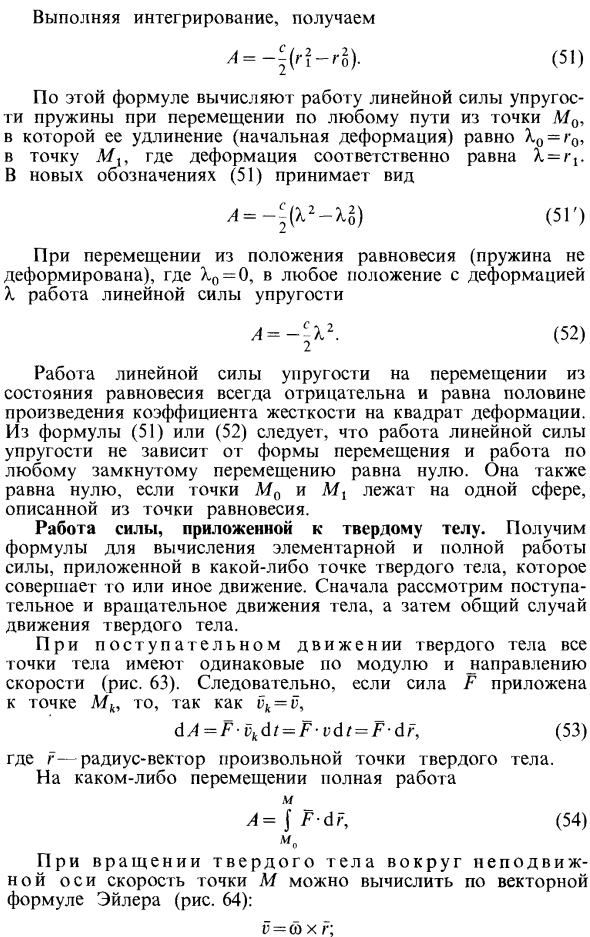
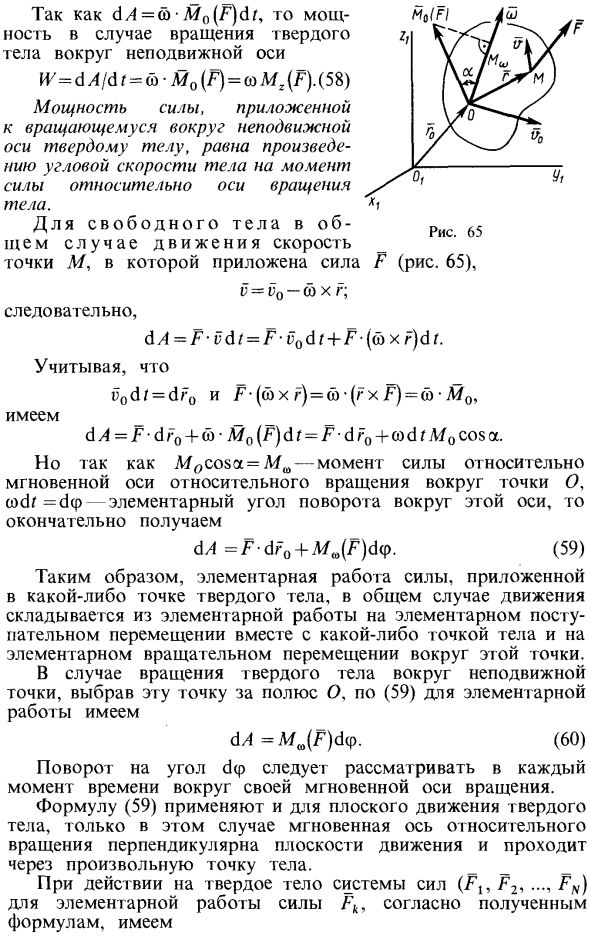
Учитывая, что vod / = dro и Γ (хг)) = — (хГ)) = Л? 0, d L = F ■ d f0 + th ■ L / о (F) dс = Г • d r0 + сdсЛ / осs a. Но Мокоса. = Mm — момент силы относительно мгновенной оси вращения относительно точки O, поэтому codr = dcp — базовый угол поворота вокруг этой оси, поэтому, наконец, d / t = Fdr0 + A / <0 (F) dcp (59) Таким образом, в случае общего движения основная работа силы, приложенной к точке на твердом теле, представляет собой базовое поступательное смещение вместе с точкой на теле и базовое вращательное смещение вокруг этой точки. Состоит из большой работы. Выберите эту точку на полюсе O для вращения твердого тела вокруг неподвижной точки. d / 1 = M „(F) d <стр. (60) Поворот на угол dtp должен учитываться в каждой точке вокруг текущей оси вращения.
Уравнение (59) также используется для твердого плоского движения. Только в этом случае мгновенная ось относительного вращения перпендикулярна плоскости движения и проходит через любую точку тела. Для основной работы силы Fk, под действием силовой системы (Ft, F2, …, Fw) на твердое тело, согласно полученной формуле dy4k = Fk dr0 + M0 (Fk) dt = Fkdr0 + Ma (Fk) dq>. Основная работа силовой системы: dJ = £ d, 4 * = ^ £ F ^ dr0 + ^^ A? 0 (F *) J <6dz = Rdr + Lo adt = = I ■ df0 + /. Я = £ А; 0 0-е? 0 0 ()); L „= f Mm (Fk) Главный вектор и главный момент силовой системы относительно мгновенной оси относительного вращения, проходящей через точку О и полюс соответственно. Вот так dА = R • dr0 + /. begindtp-R • dr0 + Lo ■ <5dz, (59 ‘).
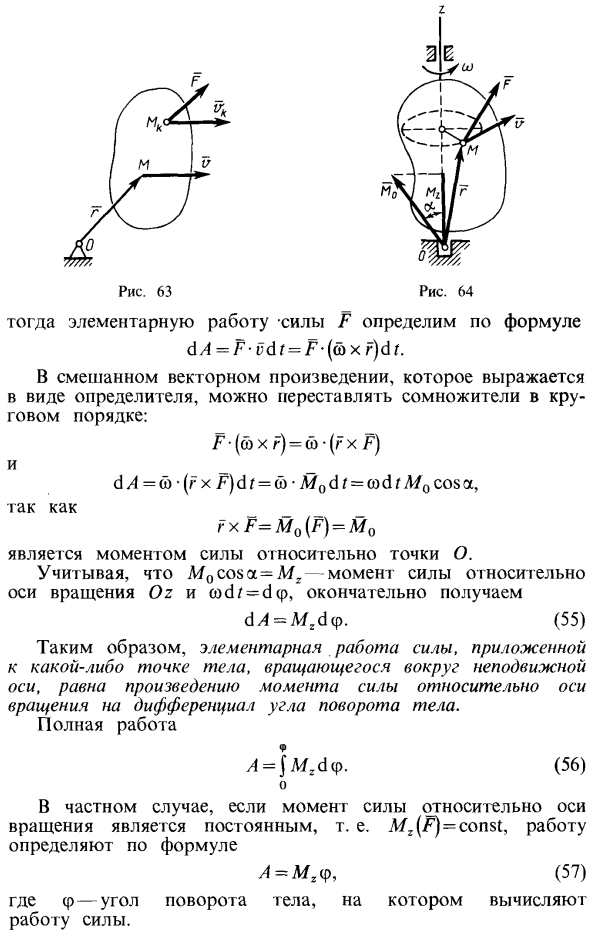
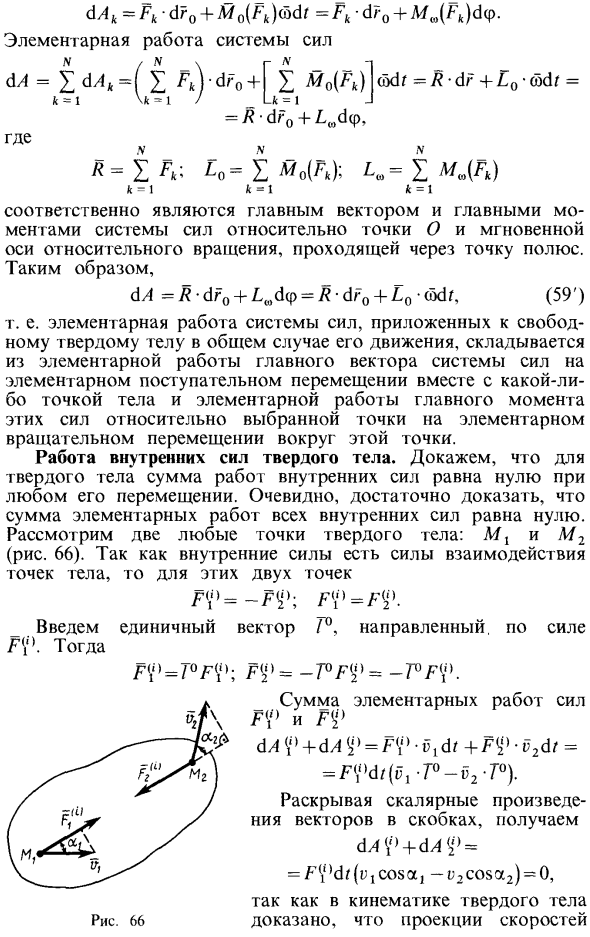
- То есть основная работа системы сил, применяемая к свободному твердому телу в общем случае его движения, является основным вектором базовой системы сил перемещения смещения наряду с некоторыми точками тела. Эта точка состоит из основной работы основных моментов этих сил относительно выбранной точки основной работы и основного вращательного смещения вокруг. Твердая внутренняя сила работает. Для твердых тел докажите, что сумма эффектов внутренних сил равна нулю для этого движения. Очевидно, достаточно доказать, что сумма основных задач всех внутренних сил равна нулю. Рассмотрим любые две точки твердого тела: и M2 (Рисунок 66). Поскольку эти внутренние силы являются силами взаимодействия между точками тела, F4 ‘= ~ F ^; F4> = F%>.
Введем единичный вектор T ° силой F4}. тогда F4 ‘= -T ° F4> = -T’F4>. Рис. 66 _Total первичной рабочей силы dA + dA = vkdt + F $ v2dt = = F ^ dt (vlT ° -v2T °). Открывая скалярное произведение векторов в скобках, d4f ’+ dA Df (vicosa, -o2cosa2) = 0, Поскольку проекция скорости подтверждается кинематикой твердого тела Две точки твердого тела в направлении прямой, соединяющей эти точки, равны друг другу для движения твердого тела. Полученное выражение в скобках имеет разность между этими проекциями двух точечных скоростей, то есть значение, равное нулю. Твердое тело можно рассматривать как состоящее из пары взаимодействующих точек, причем сумма основных действий каждой пары внутренних сил равна нулю.
Разложим движение механической системы на переносное поступательное относительно центра масс системы относительно центра масс и поступательное смещение системы координат. Людмила Фирмаль
Суммирование основной работы всех пар точек дает £ d / l I «= 0. Как известно, главный вектор и главный момент всех внутренних сил механической системы равны нулю. Суммарная работа внутренних сил равна нулю только для твердых тел и не равна нулю для механических систем общего назначения. Рассматриваемые сочлененные твердые системы часто считаются механическими системами. При расчете работы всех сил, приложенных к системе таких объектов, очевидно, достаточно учесть работу внутренних сил в твердом соединении. Когда твердое тело соединяется с соединением с использованием соединения без трения, внутренние силы в точках соединения, такие как действие и реакция, равны по величине, но противоположны по направлению, и движение в точке действия силы является обычным.
Следовательно, сумма действия этих двух внутренних сил равна нулю. Следовательно, в твердых соединениях, в которых используются нефрикционные соединения при расчете работы внутренних сил, сумма внутренних силовых работ этих соединений равна нулю относительно смещения системы суставов тела, Не нарушает жесткость. При расчете работы всех внутренних сил систему сочлененных твердых гелей, использующих такой шарнир, можно рассматривать как одно твердое тело. Это также верно при соединении твердых систем с использованием нерастягиваемых нитей, канатов и т. Д. В этом случае работа внутреннего напряжения также равна нулю.
Смотрите также:
Задачи по теоретической механике
| Дифференциальные уравнения плоского движения твердого тела | Кинетическая энергия |
| Теорема Резаля | Теорема об изменении кинетической энергии в относительном движении |
