
Оглавление:

Угловая скорость в физике
- Угловая скорость. В механике твердое тело можно определить как систему материальных точек, расстояние которых не изменяется. Естественно, системы, которые существуют в природе, могут, конечно, соответствовать этому требованию.
Однако в нормальных условиях большинство твердых частиц имеют небольшие изменения в форме. И при изучении законов движения твердого тела, В целом, вы можете сойти с рук эти изменения полностью. В следующей презентации мы рассмотрим внимательно Твердое тело как совокупность отдельных важных моментов.
твердые тела обычно совершенно неинтересны и могут считаться твердыми в механике Людмила Фирмаль
Однако это не противоречит тому факту, В действительности, . Внутренняя структура. Переход от общей формулы Дискретный, непрерывный Тело просто заменяется массой частицы с массой pdV.
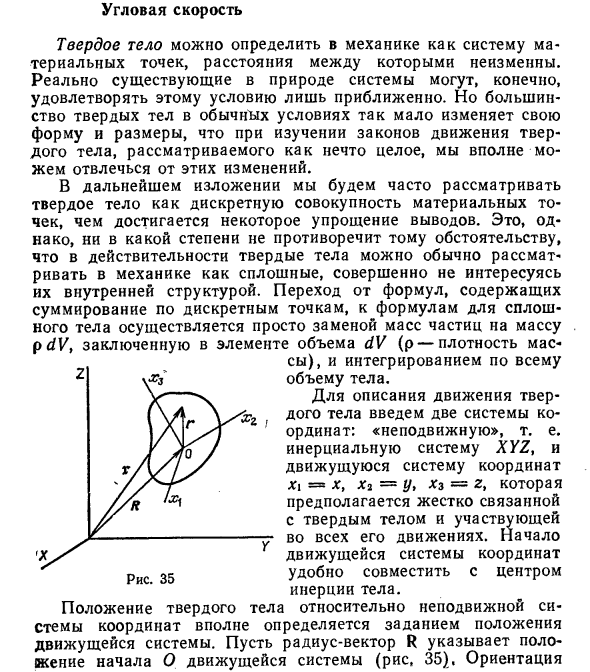
Окруженный объемным элементом dV (p — плотность массы) Интеграция всего тела. Ввести две системы для описания движения твердого тела Координаты: «неподвижные», т.е. инерциальная система X Y Z, Движущаяся система координат x \ = x, x2 = y, X3 = z Рай прочно связан с твердым телом и должен участвовать во всех его движениях.
- Начало подвижной системы координат удобно сочетать с центром инерции тела. Положение твердого тела относительно стационарной системы Система координат полностью определяется путем установки положения движущейся системы. Радиус-вектор R указывает положение начальной точки O движущейся системы (Рисунок 35).
Направление оси этой системы, которая является относительно стационарной, определяется тремя независимыми углами, поэтому имеется только шесть координат вместе с тремя компонентами вектора R. Так что все твердые 6 степеней свободы механической системы. Рассмотрим любое бесконечно малое смещение Твердое состояние Может быть выражено как общее Две части.
в результате чего центр инерции Перемещение из начальной позиции в конечную в следующих случаях Людмила Фирмаль
Одним из них является бесконечно малый параллелизм. Движение тела, Направление оси движущейся системы координат. второй -В результате бесконечно малое вращение вокруг центра инерции Тейт с твердым телом в окончательном положении.
Указывает радиус-вектор любой точки P тела радиус-вектор объекта в движущейся системе координат через r и та же точка в неподвижной системе через r Однако небольшое смещение dx в точке P является суммой смещения dR.
Относительно последнего при прохождении бесконечно малого угла d <p (см. (9.1)) с центром инерции и смещения [d <p-r]: dt = dR + [d (p • r]. Разделите это равенство на dt Введя скорость, и рассматриваемое движение происходило x d ^ -O (31,1) д т ~ V ‘ д-р, y ~ Dt ~ ’ О дт Получить соотношение между ними v = V + [fir]. (31,2) Вектор V — это скорость твердого центра инерции. На нее Также называется скоростью перевода. век Тор Q — угловая скорость вращения твердого тела.
Его направление Направление (чтобы направление d (v) совпадало с направлением оси) Вращение. Следовательно, скорость v (отн (На основе фиксированной системы координат) можно выразить поступательной скоростью тела и угловой скоростью его вращения. При выводе уравнения (31.2) следует подчеркнуть, что не использовалось какое-либо конкретное свойство источника как центра инерции тела.
Преимущества этого выбора становятся очевидными только при расчете энергии движущегося объекта. Теперь предположим, что si строго связан с твердым телом Система координат выбрана таким образом, чтобы ее начало находилось не в центре инерции O, а на расстоянии a от точки O1 до точки O.
Скорость начала координат O1 этой системы выражается как V ‘, а угловая скорость вращения выражается как flf. Опять же, рассмотрим сплошную точку P, Это означает радиус-вектор, основанный на начальной точке от O ‘до r’.
тогда Подстановка r = r ‘+ a и (31.2) v = V + [fta] + [fir ‘]. С другой стороны, V7 и (по определению V, v = = V ‘+ [OV]. Итак, мы заключаем это V ‘= V + [fta], фут / = n. (31,3) Второе из этих равенств очень важно. Мы видим это Угловая скорость в любое время Вы можете видеть, что система координат, жестко связанная с телом, вращается и совершенно не зависит от этой системы.
Все такие системы вращаются в заданной точке вокруг осей, параллельных друг другу с одинаковым абсолютным значением Скорость Q. Эта ситуация дает вам право звонить Q. Например, угловая скорость твердого тела. Нет такой «абсолютной» особенности в скорости перевода.
Из первого уравнения (31.3) V а ( Моменты) перпендикулярны друг другу с любым выбором начала координат O, и они (то есть V7 и Q ‘) перпендикулярны друг другу с решениями относительно любых других Начать О. Из уравнения (31.2) Рост v всех точек тела находится в одной плоскости.
Плоскость, перпендикулярная Q. В этом случае всегда Возьмем такой старт 0 1 x) и его скорость V ‘равна нулю и так Движение твердого тела (в настоящее время) выражается в виде чистого вращения вокруг оси через O1.
Эта ось называется мгновенной осью вращения тела d). В будущем мы всегда первыми Движущаяся система координат выбирается в центре инерции тела так, чтобы ось вращения тела проходила через этот центр. Как правило, при движении тела изменяется как абсолютное значение фута, так и направление оси вращения.
Смотрите также:
| Резонанс в нелинейных колебаниях | Тензор инерции в физике |
| Движение в быстро осциллирующем поле | Момент импульса твердого тела |
Если вам потребуется помощь по физике вы всегда можете написать мне в whatsapp.
