
Оглавление:

Упрощения при расчете симметричных рам
- Упрощение при расчете симметричных рам, наиболее трудоемкой части расчета статических неопределенных систем силовым методом, можно добиться упрощения при расчете рам силовым методом только за счет нулевой инверсии расчета неизвестных боковых коэффициентов в основной системе перемещений от
одиночных и нагрузочных воздействий. Для фрейма произвольных геометрических фигур это может быть достигнуто путем выбора базовой системы, в которой участки из отдельных эффектов являются локальными, для этого система делится на геометрические инвариантные части, где все больше и больше
одиночных участков не имеют общих областей. При выборе этой базовой системы каждое Людмила Фирмаль
каноническое уравнение содержит неполное число неизвестных, что облегчает его вычисление. Можно добиться более существенного упрощения при расчете симметричных систем. Такие системы имеют симметричную геометрическую схему, в которой жесткость симметрично расположенных элементов равна друг другу. Чтобы упростить расчет симметричной рамки, нужно выбрать только
симметричную основную систему. 415 страниц. 34.12 В симметричной базовой системе, выбранной путем отбрасывания избыточной связи на оси симметрии, неизвестные X / силы делятся на две группы: симметричные и антисимметричные. Разделение неизвестных на две группы приводит к разделению общей системы нормальных уравнений на две подсистемы,одна из которых содержит только симметричные неизвестные. Рассмотрим симметричную
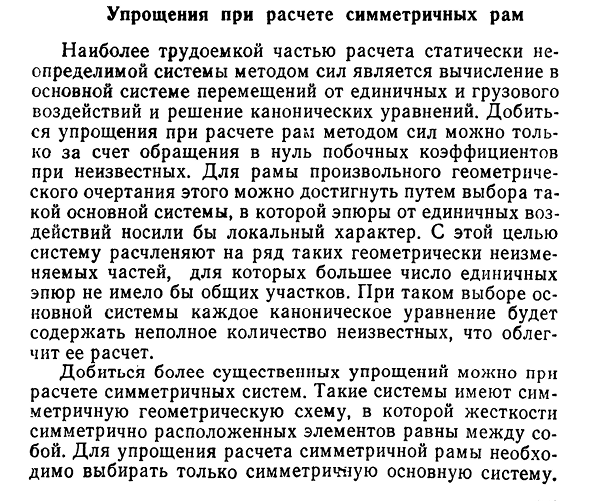
- рамку(рис. 34.11, а). Этот кадр трижды статически неопределим. Выберем базовую систему симметрии, разрезав рамку по оси симметрии на две части(рис. 34.11). Поскольку в месте разреза удаляются три внутренних соединения, то его воздействие будет заменено тремя внутренними силами M, N и Q изгибающего момента на обеих половинах разрезаемой Рамы X-Y силами-X3 и поперечными продольными силами-X3(рис. 34.11, б). Запишите канонические уравнения трех статических неопределенных систем: PH1+612X2+61zhz+D1g=0;1 Шесть. Два. 1×1+»2 2+»2Z x z+D2=0g ; Е31+*32 *2+*33 X3+A3F=0. Дж Чтобы определить коэффициенты неизвестных,
создайте диаграмму сгиба в выбранной базовой системе От мощности блока 416моментов X>=1;x2=1 и XS=1(фиг. 34.11, г-е). На симметрично расположенных участках участков Mg и M2 вертикальные оси моментов равны друг другу, а знак совпадает друг с другом, поскольку в симметричной части вертикальные оси моментов равны друг другу, но знак противоположен. Таким образом,неизвестные Xi и x2 симметричны, в то время как X3 нехарактерно неизвестен. Таким образом, в симметричной базовой системе неизвестное
X/делится на симметричное и антисимметричное вместо разрушенного Людмила Фирмаль
внутреннего пространства по оси симметрии. Так как все участки Mi, M2, M3 линейны, то для определения коэффициентов неизвестного используем правила Верещагина. Умножьте [симметричный график M]на график обратной симметрии M3, чтобы указать, что боковое смещение BLZ равно нулю. Сначала умножьте левую сторону рамки на участки M{и M3, затем на правую сторону»!»3=» 31=S f ds («»•D/(2^A) — —(N•1)/(2G J2 2 * 2)+(lh•1)/(2EL)+ ‘ ll•1) I(2EJ2 2•2)=0. Аналогично, 623=632=0. Итак, от умножения симметричного участка по правилам Верещагина до антисимметричного участка соответствующее
перемещение (одиночное или грузовое) равно нулю. В нашем случае система нормальных уравнений принимает вид: n * 1-M12 * 2+D1£=0;| 621Xl+e22X2+A2F=0;)633 × 3+A3F=0 • То есть целостная система делится на две подсистемы. Для определения симметричных неизвестных (Xt и x2) необходимо решить систему из двух уравнений с двумя неизвестными, а антисимметричное неизвестное (X3) должно иметь одно неизвестное. 27-480 417: группа неизвестна. При вычислении сложных статически неопределенных фреймов не всегда удается разместить все неизвестные силы вместо разрушенных связей на оси симметрии, и в этом случае используется метод групповых
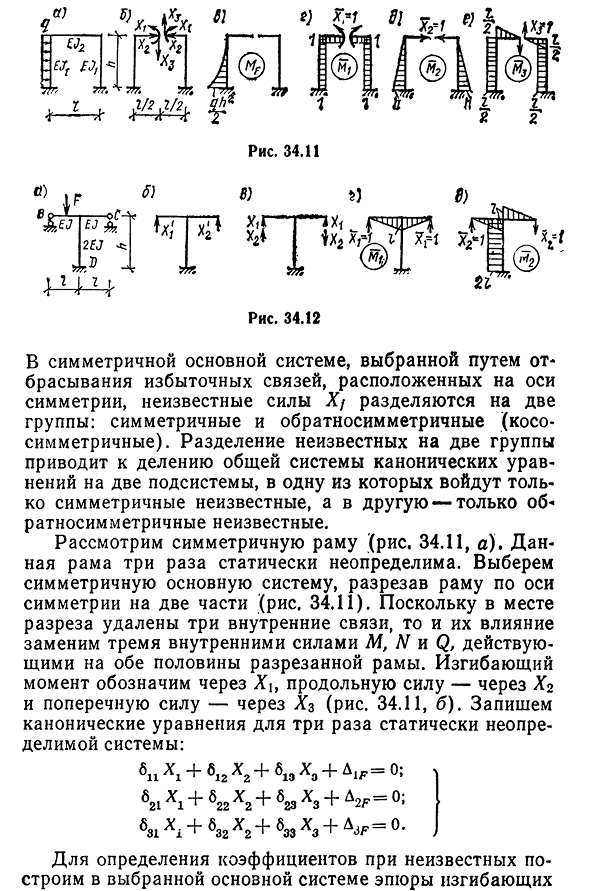
неизвестных для преобразования неизвестных в симметрии и антисимметрии. В качестве примера рассмотрим симметричную рамку(рис. 34.12, а). Этот кадр статически неопределим дважды. Отбросим стержни опор B и C и выберем базовую симметричную систему, заменив их неизвестными силами X\и X’2 (рис. 34.12, б). Поскольку силы X\и X’2 не равны друг другу, для вычисления заданного кадра необходимо решить систему двух канонических уравнений с двумя неизвестными, но для одной и той же базовой системы мы можем получить симметричный и антисимметричный график симметрии неизвестного момента от изгибающей силы. Для этого вместо одной силы применяется группа сил. Неизвестную реакцию\и Х2 в опоре представить суммой двух сил х, а неизвестну
ю реакцию в опоре с представить в виде разности между теми же силами х^и Х2(и ее 34.12, б). Это преобразование основано на известной теореме алгебры, согласно которой две неизвестные величины X’1 и X’2 могут быть заменены двумя другими неизвестными. После перехода к неизвестному числу групп, биссектрисная сила, приложенная к симметричному поперечному сечению каркаса XY, симметрична неизвестной, так как график изгибающего момента L4 от его одновременного действия,основной системы 34.12 g). Две другие силы x2 являются антисимметричными и неизвестными, поскольку из-за их одновременного действия график изгибающего момента M2 в основной системе является антисимметричным(рис. 34.12, г). Поскольку неизвестные Xi и x2
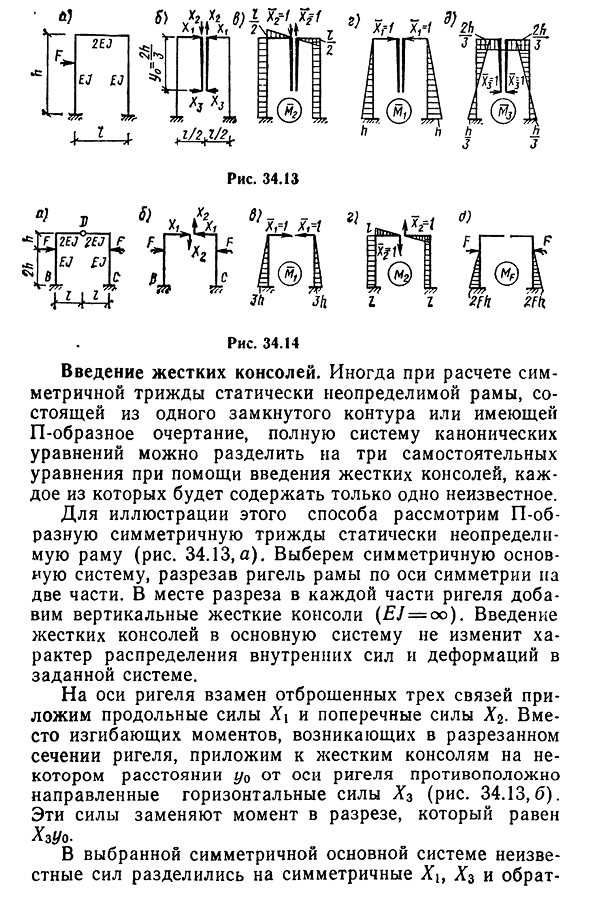
разделены на две группы, боковое смещение 612=621=0 равно нулю из графика симметрии, умноженного на обратную симметрию M2, а каноническая система уравнений равна: =0 и 622^2_| » D2/7=: = 0. 41N^X r l X,=t И ЗП ДХ Рис 34.14 I г Введение жесткой консоли. Иногда при расчете симметричной трехградусной неопределенной рамки, состоящей из одного замкнутого контура или имеющей U-образную форму, требуется полная система канонических уравнений для введения жесткой консоли. Чтобы проиллюстрировать этот метод, N-o-различные симметричные трехградусные статические неопределенные кадры(рис. 34.13, а). Попробуем выбрать основную систему симметрии, разрезав поперечину рамы вдоль оси симметрии на две части. Вместо того чтобы разрезать каждую часть поперечины, добавьте вертикальную жесткую консоль (£7=OO). Введение жестко
й консоли в основную систему не меняет характера распределения внутренних сил и деформаций в данной системе. Вместо этого приложите продольную силу Xj и боковую силу x2 к оси перекладины трех отброшенных звеньев. Вместо изгибающего момента, возникающего в режущей части ригеля, действует горизонтальная сила Х3 (рис. 34.13, 6). Эти силы заменяют моменты сечения, равные Hz (/o). В выбранной симметричной системе основания неизвестная сила была разделена на симметричную XY X3 и противоположную- Двадцать семь* 419nesymmetric Х2. Таким образом, канонические уравнения делятся на две группы \1x i+BZ x z+=°; 1\ + bzz X z+d Zr=0;/ 22 2 + D2R=°- Чтобы разделить систему симметрии канонического уравнения на два независимых уравнения, боковое смещение
B13=bz1=0 должно быть равно нулю. Боковое перемещение 6j3 будет равно нулю, если взять жесткую длину консоли, равную y0=2L / 3. В этом случае для центра тяжести участка изгибающего момента Mi нулевые координаты участка L43 размещаются на стойке (рис. В результате, 34.13, d)и 6i3=0, система нормальных уравнений для вычисления заданного кадра распадается на три независимых уравнения: +D1G=0$22X2+D2P=0, 633X3+D2g=0- Преобразование внешних нагрузок. Описанный способ упрощения расчета симметричной рамки заключается в том, что для разделения полной системы канонических уравнений на симметричную и антисимметричную подсистемы, при работе на симметричной рамке с неизвестной, но только симметричной нагрузкой, все члены
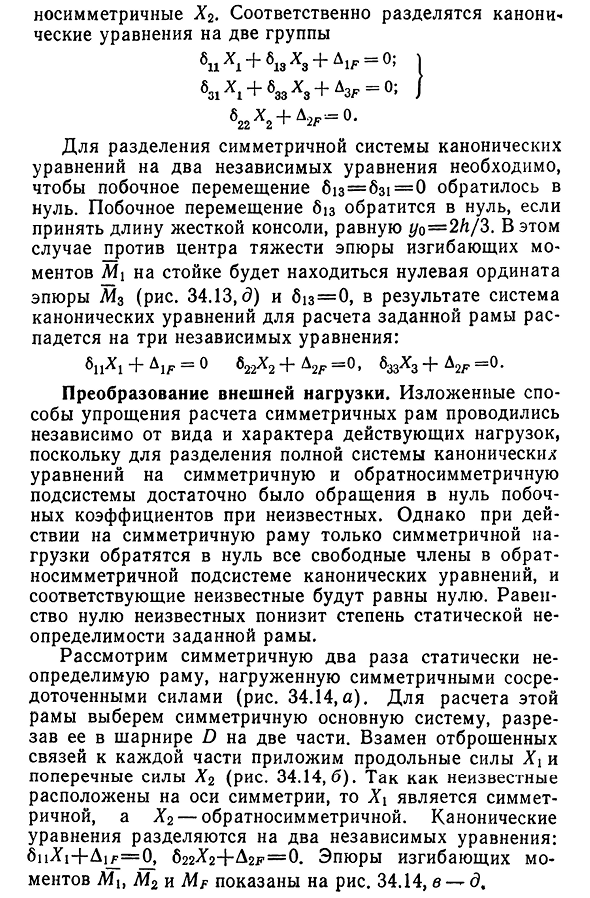
подсистемы обратной симметрии в каноническом уравнении свободного члена исчезают, а соответствующее неизвестное число равно этому уменьшает степень статической неопределенности рамки. Рассмотрим дважды статическую неопределенную рамку, нагруженную симметричной фокусирующей нагрузкой(рис. 34.14, а). Для расчета этой рамы выберите симметричную основную систему, разрезав ее шарнирами D на две части. Вместо отброшенного соединения с каждым компонентом, продольная сила Xi и поперечная сила x2(фиг. 34.14, 6). Поскольку неизвестное
расположено на оси симметрии, Xi симметрично,а x2-обратно. Каноническое уравнение делится на два независимых уравнения:6ixi+a i_f=^,&22X2+^2f=0. Изгибающий момент показан на рисунке и рисунке L4m2. 34.14, Б-6. 420 для определения свободных термов Aif и D2G соответствующий единичный участок следует умножить на участок от заданной нагрузки по правилам Верещагина:
Смотрите также:
Примеры решения задач технической механике
