
Оглавление:

Уравнения равновесия
- Под действием непрерывной силы найдите равновесное состояние нерастягиваемых и податливых нитей. Эту задачу можно рассматривать как ограничительный случай веревочных полигонов, но она учитывается непосредственно. Длина дуги обозначается С. Он рассчитывается от начальной точки в определенном направлении АВ рис. 89. Предположим, что внешняя сила, действующая на элемент ds, может быть представлена в виде одной силы Fds порядка ds, приложенной в точке этого элемента. XDS, И Ярдов, ЗДС Где X, Y и Z проекции вектора F, называемые силами, которые представляют единицы длины.
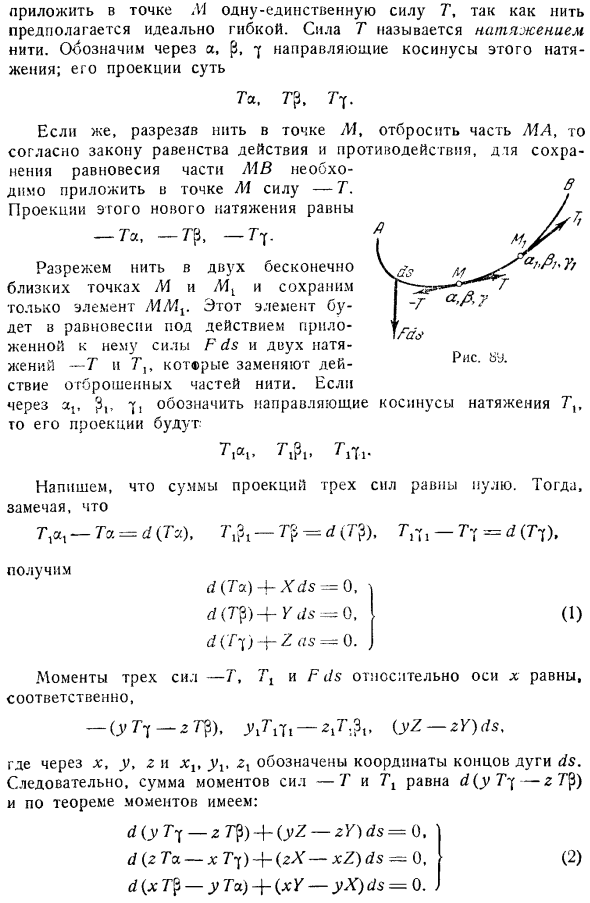
Если отбросить часть нити MV и принять во внимание остальную AM, то для поддержания ее равновесия необходимо приложить единственную силу G в точке A1.Сила T называется натяжением нити. a, p и 7 указывают Косинус направления этого напряжения. Его проекция и есть суть Ха. Джи Т7. Если отрезать нить в точке L1, то часть Ма отбрасывается, и сила Т должна быть приложена в точке L4 для поддержания равновесия некоторой части МВ согласно уравнению действия и реакции.
Если тело имеет очень малую толщину по сравнению с другими своими измерениями, то его уподобляют поверхности. Людмила Фирмаль
Предсказание этого нового напряжения равнозначно Та Т Тъ Бесконечно 2, bu действие adj F ds и 2 котфри замещающее действие Если Напряжение Tx Косинус Если перерезать нить в точке близости M, то только элемент I IR будет находиться в равновесии с натяжением T и Tj. Операция отбрасывания части резьбы осуществляется через ar Er 71 для указания направляющей, ее выступа. Напишите, что сумма греховной проективной силы равна нулю.
Тогда вы замечаете это Т, в ть = 7 га, ТЛ Р = Д Т 7 171 Р7 = 7 7 7 Мы получаем д та а XDS с 0,Д Т Г ДС 0,д Тас 0. 1 3 силовых момента F, F1 и F ds на оси x равны О 7 это не. LLT1 21GA yY 7 Где x, y, z и xp j p zx указывают конечную точку DS дуги coordinates. So, сумма моментов силы T и Tt равна d yTy z T , а по моменту теорема: Д Г ти zTfy + уг З. Ы. ДС = 0, д зта х т на ZX ХZ ДС 0,д ХТФ та + х ух ДС = Д 2 разверните первое уравнение 2 Ту ды + Г Д Т Мп ДЗ зд ТП + уг З. Ы. ДС = Д Уравнение 1 вызывает разрушение членов y и z, за которым следует Оставаться 4dy RF RFZ = 0, y = y 7 ды ДЗ = Д 2 е уравнение 2 имеет вид dx dy ДЗ Это означает, что напряжение направлено к касательной кривой.
- Если вы рассматриваете поток как ограничение полигона веревки, вы получаете тот же результат. Общее значение 3 соединений очевидно ds, но его нужно напрячь так, чтобы поток stretches. To для этого нужно повернуть натяжение T к дуге, чтобы увеличить. Поэтому мы должны поэтому принять знак Если ввести эти выражения в уравнение 1, то получим: д 7 х + XDS с = д 7 л + РДС = г 7 g + ЗДС = 3 Уравнение 2 является результатом уравнения 3. Общая теорема Из формул 1 и 2 мы получаем непосредственно следующие 2 теоремы: Если сила E перпендикулярна любой оси, например оси Ox, проекция напряжения на эту ось равна constant. In фактически, из условия X O получаем Ta = const.
Если сила F всегда находится в той же плоскости, что и ось, например ось Ox, то момент натяжения на этой оси равен constant. In факт, YT zT = const получается из условия yZ zY = 0. Эти 2 теоремы являются следующими частными случаями: Если сила F в любом месте вдоль кривой принадлежит линейному комплексу, то момент натяжения относительно комплекса равен constant. In дело в том, что если сила принадлежит линейному комплексному числу, то уравнение вида РХ + ду + РЗ + а юз З. Ы.
Таким образом, центр тяжести тела — это точка, через которую всегда проходит его вес, каково бы ни было положение тела. Людмила Фирмаль
B для компьютера ZX ХZ с ху ух = 0, где р м м, р, А, B, C являются константами. Замените X в этом выражении на Y through z Tt К уравнению ЗБТ 4 qTFy РТ + у г з БТ з ху кт хр а = пост. Это уравнение представляет собой относительный момент натяжения пункт 28 и постоянную векторную систему с координатами p, qt r, a, b и C. Pennakietti, Rendiconti del Circolo math, di Palermo, v. VI. Общие интегралы. Наиболее распространенным является случай, когда сила F, представляющая собой единицу длины, зависит от положения и направления элемента ds в пространстве и от thread. In в этом случае X, Y, Z будет функцией x, y, r, 5.
При этих условиях вышеприведенные 3 уравнения равновесия 3 и уравнение виде системы 4 дифференциальных уравнений, которые определяют X и y. Функции Z и т. Это 1 го уравнения первого порядка для T, но 2 го уравнения первого порядка для X, Y и Z. Таким образом, их общий Интеграл содержит 6 произвольных постоянных, например, начальное значение с = С0, и вы можете получить 6 значений величины х, то YT Z, и т. так… Все сразу х = р ы, как CLF С2,…, СГ y = о с, С2,…
Смотрите также:
Решение задач по теоретической механике
| Кольца, скользящие на нити | Определение постоянных, условия на концах |
| Фермы | Случай, когда сила не зависит от длины дуги |
