
Оглавление:

Аналитическая механика. Связи и их классификация
- Аналитическая механика требует более детального рассмотрения взаимосвязей, накладываемых на точки механической системы. Механическая система, как вы знаете, называется любой комбинацией материальных точек. Условия, которые ограничивают свободу перемещения точек в механической системе, называются ограничениями. Математически, отношения могут быть выражены через уравнения или неравенства, включающие время, координаты всей или части системной точки и производные по времени различных порядков.
Для одной точки уравнение связи общего случая можно выразить в виде f (x, y, z; x, y, z; x, y, z; t) = 0 (1) В будущем ограничьте рассмотрение отношениями. Реляционные уравнения могут включать производные по времени от координат, которые меньше или равны первому порядку. Для механической системы, состоящей из N точек, уравнение / ограничения представляется системой уравнений (2) Считается, что индекс k принимает все или часть значения 1-7В как в координатах, так и в его производных. Если уравнение ограничения (2) содержит только координаты точки и не является производной координат, ограничение называется геометрическим.
Поэтому внешние силы, действующие на систему тел отдельно, без внутренних сил, удовлетворяют условиям равновесия сил, приложенных к твердому телу, за которое следует принять эту систему тел. Людмила Фирмаль
Форма геометрического уравнения системы W-Z *, /) = 0 В дополнение к координатам, если уравнение ограничения содержит только производную по времени (проекция скорости точки на координатную ось) или производную, отличную от времени, связь называется кинематикой. В этом случае уравнение связи представляет собой дифференциальное уравнение с точечными координатами. Кинематическое отношение может быть получено из геометрического отношения путем дифференцирования. Поскольку дифференциальные уравнения не всегда могут быть интегрированы, геометрические отношения не всегда выводятся из кинематических отношений.
Связанное дифференциальное уравнение может быть выражено как производная по времени конкретной функции координат, а в некоторых случаях: После интеграции такие кинематические связи становятся геометрическими. Все геометрические и интегрируемые кинематические связи называются голономикой. Неинтегрируемые кинематические отношения, которые нельзя свести к геометрическим, являются неголономными. главный Класс неголономной механической системы — рис. 93 ми соединение (неголономная система) В настоящее время изучаются, эти исследования еще не завершены. Более систематически Системы с такими отношениями не рассматриваются.
- По мере движения механической системы координаты точек, которые являются частью уравнения ограничения, и их производные по времени зависят от времени. Помимо координат и их производных, вы можете явно ввести время в уравнение ограничения. Соотношение уравнений, которые время явно не входит, называется стационарным или упрочняющим. Если время явно включено в уравнение ограничения, ограничение называется переходным и реомическим. Нефиксированное сцепление обычно достигается путем перемещения или деформации объекта.
Простейший случай одной точки, подвижной или деформируемой формы нестационарного геометрического соединения Поверхность имеет уравнение f (x, y, z, f) = 0. Когда математически выражается уравнением, взаимосвязь называется неосвобождающей или двунаправленной, а когда выражается неравенством, она называется деблокированной или односторонней.
Ось вала описывает при резонансе усеченную коническую поверхность с угловой скоростью, равной угловой скорости вала, причем оба радиуса оснований неограниченно возрастают с течением времени. Людмила Фирмаль
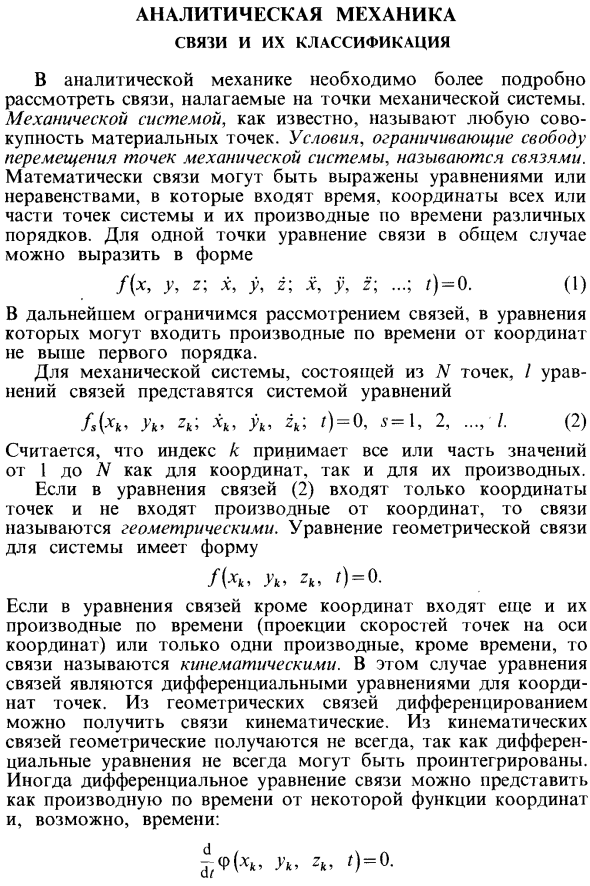
Если другой конец одной точки M, прикрепленный к концу неподвижного стержня, прикреплен к неподвижной точке О, соединение (жесткий стержень) является геометрическим и не будет размыкаться (Рис. 93). Ее уравнение x2 + y2 + z2 — l2 = 0, Где / — длина стержня. Когда сердечник заменяется на нить той же длины, связь (нить) освобождается. Это математически представлено неравенством x2 + y2 + z2-l2 ^ Q. Если точка M находится на расстоянии, меньшем, чем длина нити от точки O во время перемещения, нить больше не будет ограничивать свободу перемещения точки.
Соединение освобождает точку от действия (пунктирная линия на рисунке 93). В дальнейшем выпуск облигаций рассматриваться не будет. Все общение можно разделить на реальность и идеал. Идеальная связь включает в себя все связи без трения. Некоторые фрикционные отношения также идеальны. Идеальная концепция соединения дается после введения концепции возможного движения системы.
Смотрите также:
Задачи по теоретической механике
| Динамическая уравновешенность | Возможные перемещения |
| Основные виды неуравновешенностей | Элементарная работа силы на возможном перемещении. Идеальные связи |
