
Оглавление:

Основные виды неуравновешенностей
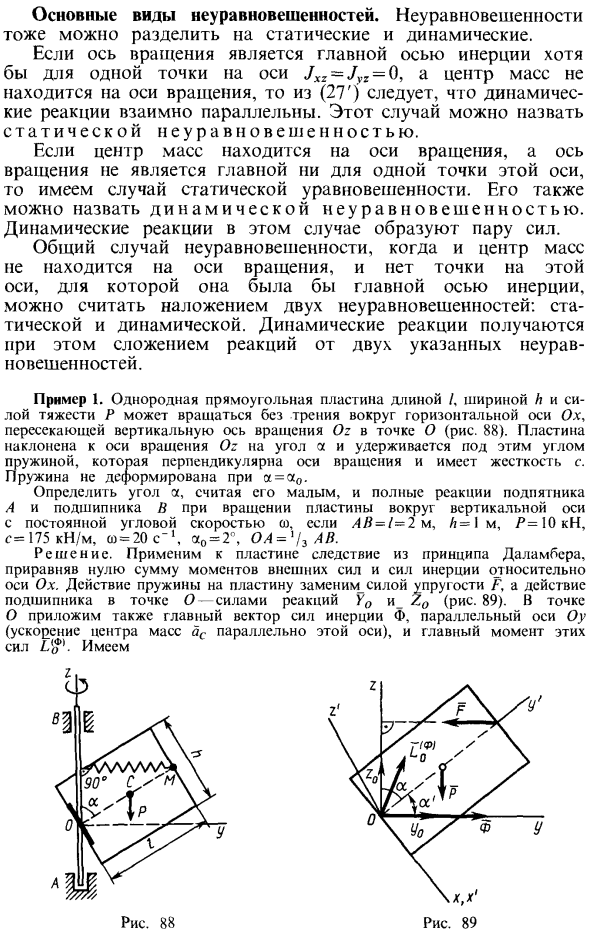
- Дисбаланс также можно разделить статически и динамически. Если ось вращения является, по меньшей мере, одной главной осью инерции с осью Z α = J, I = 0, и центр тяжести не находится на оси вращения, динамический отклик параллелен друг другу (27 ‘). Это называется статическим дисбалансом. Если центр тяжести находится на оси вращения, а ось вращения не является главной осью в какой-либо точке на этой оси, может возникнуть статический баланс. Также называется динамическим дисбалансом.
Динамическая реакция в этом случае создает пару сил. Общий случай дисбаланса, когда центр масс находится не на оси вращения, и на этой оси нет точки, являющейся главной осью инерции, можно рассматривать как суперпозицию двух дисбалансов, статического и динамического. Я могу Динамический ответ может быть получен путем добавления ответов от этих двух дисбалансов. Для небольших углов. Подстановка этих значений в (а) дает Уравнение, которое определяет: (А ‘) s / ’(» -ao) -u «- ^ a> r> Центробежный момент инерции J, глава 3). У нас есть Формула (35 ‘) (см. § (В) -Insrc момент инерции относительно главной оси.
Гироскопический момент Как уже известно, если на гироскоп действуют внешние силы, создающие момент относительно неподвижной его точки, то гироскоп прецессирует с некоторой угловой скоростью. Людмила Фирмаль
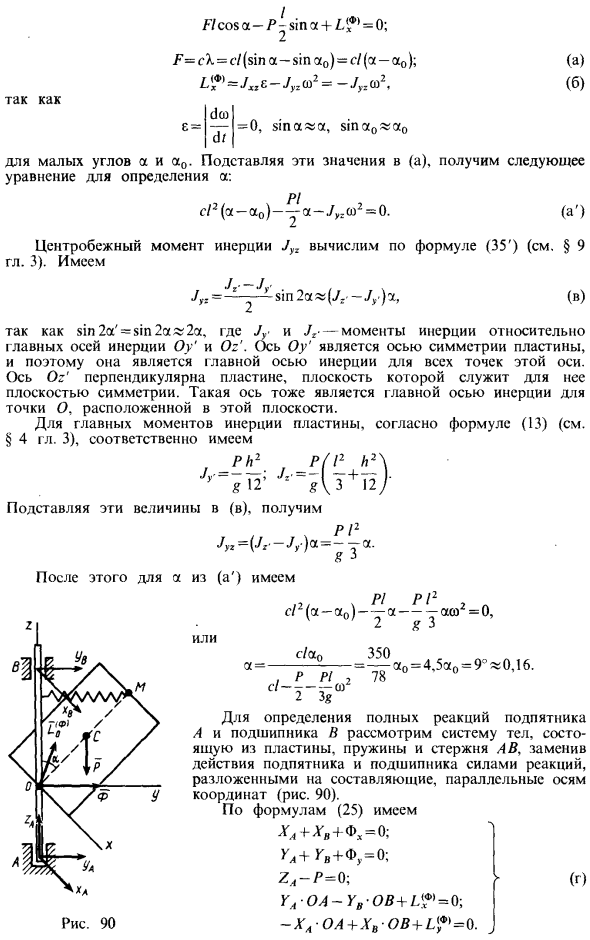
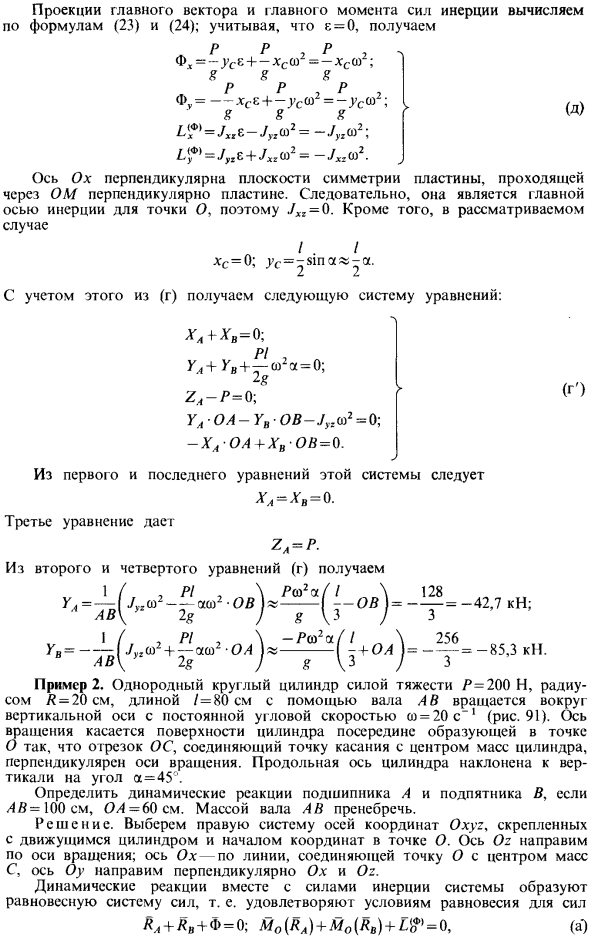
Таким образом, это явление всех точек на этой оси. Ось Oz перпендикулярна пластине, а ее плоскость функционирует как плоскость симметрии. Такая ось также является главной осью инерции точки O в этой плоскости. Основной момент инерции пластины соответствует уравнению (13) соответственно (см. § 4 гл.3) замена OL-Uv’OV + £. «- 0; -CHOLA + XY OV + Z.» * «= 0. (С) приобретать (А ‘) имеет s / cha-oh) — предопределенный B рассматривает коробчатую систему, состоящую из пластин, пружин и шатунов AB, и заменяет упорный подшипник и движение подшипника силой реакции, которая разлагается на компоненты, параллельные координатным осям (рис. 90). Из уравнения (25).
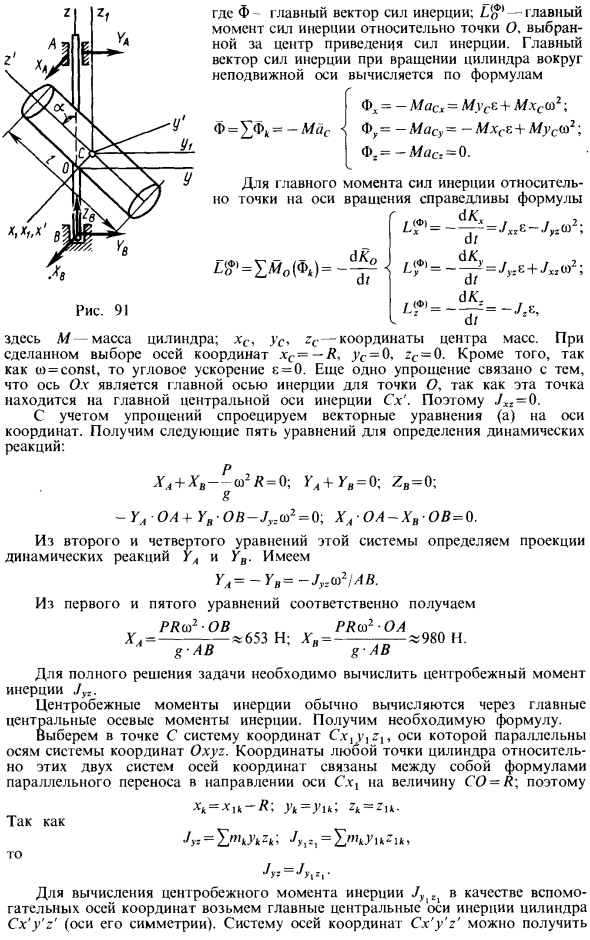
- Главная векторная проекция и главный момент инерции рассчитываются по уравнениям (23) и (24). Учитывая = 0, получим (D) £ ^ * = J „s + J„ a> 2 = -J Ось Ox перпендикулярна плоскости симметрии пластины, которая проходит через ОМ перпендикулярно плите. Следовательно, это шпиндель / „= 0. Дело / И «аа. 1uk> Система уравнений: (G) ULA-1B OB — Jrtm-CHLOA + XB OB = 0. Последнее уравнение = -42,7 кН; Пример 2. Однородный круг с гравитацией 8 = 200 Н, радиусом 8 = 20 см, длиной f = 80 см, вал АВ вращается вокруг вертикальной оси с постоянной угловой скоростью = const, тогда угловое ускорение Поскольку ka> выше главной центральной оси Cx инерции, ось Ox является главной осью инерции точки O.
Поэтому векторное уравнение (координаты) проектируется с учетом J-упрощения. Получите следующие пять уравнений для определения динамического отклика: Chl + Xb-o> 2H-0; Ch + Y = 0: ZB = 0; г -OUL OA + Y, -OB-Jyl <o2 = 0, CHLOA-XB-OV = 0. Из второго и четвертого уравнений этой системы определяется прогноз динамического отклика hl и YB. У нас есть Yl = -YB = -Jy- ^ jAB. Получить РЯш2 ■ OBPR®2 ■ ОА из первого и пятого уравнений соответственно. Chl = ——— «653 N; X, = ——» 980N. G-AB G-AB Чтобы полностью решить задачу, нужно рассчитать центробежный момент инерции J ^. Центробежный момент инерции обычно рассчитывается через основной момент инерции центральной оси.
В общем случае сила сопротивления пространства может зависеть от времени, так как пространство расширяется, от места нахождения материальной точки в пространстве, ее скорости, ускорения и т. Людмила Фирмаль
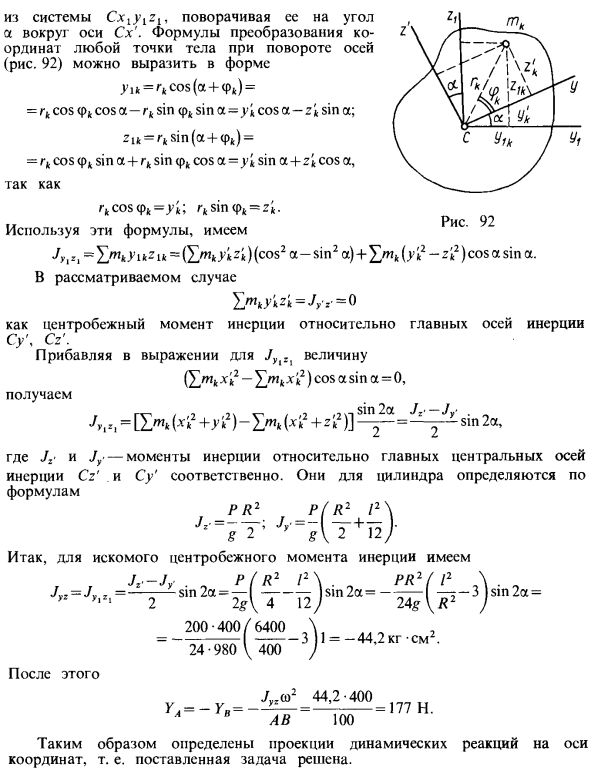
Получите выражение, которое вы хотите. Выберите систему координат с параллельными осями в точке C Ось системы координат Охуг. Координаты любой точки на цилиндре для этих двух систем координатных осей связаны значением CO = Z с формулой переноса в направлении оси C.x. И поэтому L = L, 1- Для расчета центробежного момента инерции в качестве вспомогательной координатной оси используется главная центральная ось цилиндра Cx’y’z ‘(его ось симметрии).
Вы можете получить систему координат Cx’y’z ‘ система И вокруг оси Cx ‘. Формула преобразует ординату любой точки на теле при повороте формы -GK COS <₽! Формула у нас есть L, значение Мы получаем Как центробежный момент инерции Su ‘, Cr’. добавленной Здесь, * Мул Центральная ось Цилиндр определяется □ Состояние на складе Т ‘ Желаемый центробежный момент инерции Осевая реакция Координаты, то есть проблема решена.
Смотрите также:
Задачи по теоретической механике
| Статическая уравновешенность | Аналитическая механика. Связи и их классификация |
| Динамическая уравновешенность | Возможные перемещения |
