
Оглавление:

Дифференциальные уравнения движения системы
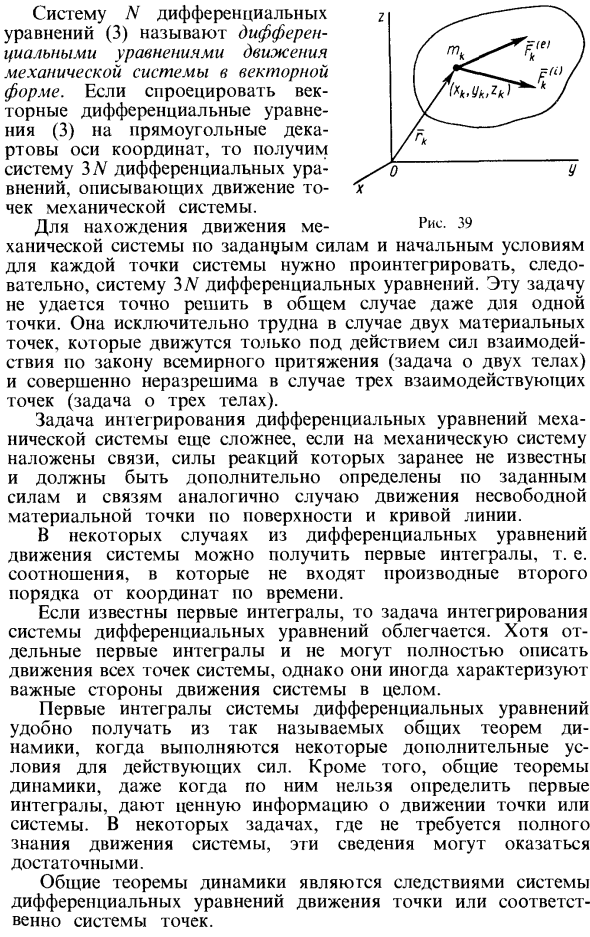
- Приложите внешнюю силу и внутреннюю силу, действующую на систему, состоящую из N точек (рис. 39). Если внешняя сила M » ‘и вся внутренняя сила F’1 приложены к каждой точке в системе, вы можете построить дифференциальное уравнение движения, например, для любой точки Арт в системе. w »0 = Ae, + FL ° (* = 1, 2, …, N). (3) Система дифференциальных уравнений (3) называется дифференциальным уравнением движения механической системы в векторном виде.
Кинетическая энергия машины, начиная с определенного момента, увеличивается или уменьшается в зависимости от того, превышает ли основная работа движущей силы основную работу сопротивления. Людмила Фирмаль
Проецирование векторного дифференциального уравнения (3) на декартовы декартовы оси дает систему дифференциальных уравнений 3 Вт, которые описывают движение точек в механической системе. Поэтому, чтобы найти движение механической системы в соответствии с условиями силы, заданными для каждой точки в системе, необходимо интегрировать систему дифференциальных уравнений 3N. Эта проблема не может быть решена точно, даже если это общая точка в общем случае.
- В случае двух материальных точек, которые движутся только под действием силы взаимодействия по универсальному закону притяжения (задача двух тел), это очень сложно, и случай трех точек взаимодействия (задача трех тел) не может быть полностью решен. Задача интегрирования дифференциального уравнения в механическую систему является более сложной, если механическая система ограничена и ее сила реакции заранее не известна, для перемещения несвободных материальных точек вдоль поверхностей и кривых. Как и в случае, он должен быть дополнительно определен с учетом приведенных сил и ограничений.
В некоторых случаях интегралы первого порядка могут быть получены из дифференциальных уравнений движения системы, то есть отношений, которые не включают производные второго порядка по временным координатам. Если вы знаете первый интеграл, задача интеграции системы дифференциальных уравнений становится проще. Отдельные начальные интегралы не могут полностью учитывать движение всех точек в системе, но могут характеризовать важные аспекты общего движения системы.
Если начальное отклонение и скорость груза также находятся в плоскости l, то маятник должен всегда находиться в плоскости l и быть закреплен на центральной рамке отсчета. Людмила Фирмаль
Первый интеграл системы дифференциальных уравнений может быть удобно получен из так называемой общей теоремы. Намики — это когда выполняются некоторые дополнительные требования действующего подразделения. Кроме того, общая теорема динамики дает ценную информацию о движении точек или систем, даже если исходные интегралы не могут быть определены из них. Эта информация может быть достаточной для некоторых задач, которые не требуют полного знания поведения системы. Общая теорема динамики является результатом дифференциальной системы уравнений движения точки или системы точек.
Смотрите также:
Задачи по теоретической механике
