
Оглавление:

Выражение компонентов тензора инерции через главные моменты инерции
- Если главный момент инерции Ox’y’z ‘относительно главной оси инерции Ox’y’z известен, то есть, если J, = JX-, J2 = Jy’, определить компоненту тензора инерции в точке O относительно координатной оси Oxyz вы. — Координатная ось Oxyz относительно главной оси инерции Ox’y’z ‘приведена в таблице углов. Ox ‘; T O /; /’ Oz ‘; £’ Корова, я пирог Оу; J PZ 12 Озу «3Рз13» Осевой момент инерции для осей Ox, Oy, Oz через основной момент инерции определяется по формуле (24 ‘) — взятие оси 01 координатных осей Ox, Oy, Oz непрерывно в качестве оси 01, Jx = Jx.cos2a1 + J) l.cos2p1 + JI.cos2y1; Jy = Jx, cos2a2 + J). cos2p2- | -J2.cos2Y2;> (31) Jx = Jx.cos2a3 + Jy.cos2 P3 + J2.cos2y3.
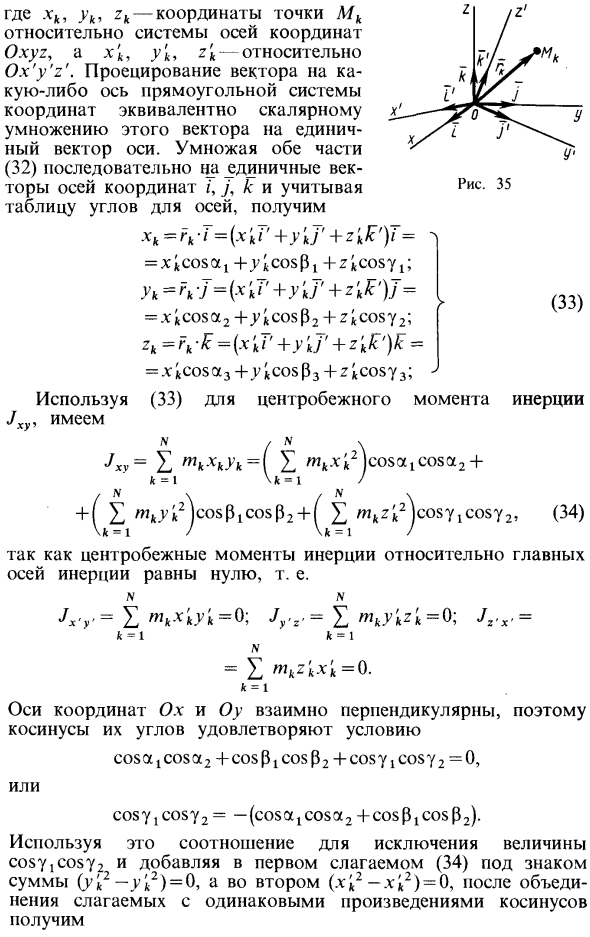
Чтобы выразить центробежный момент инерции через основной момент инерции, мы используем уравнение, которое преобразует координаты точки тела, когда ось координат вращается вокруг точки O (Рисунок 35). Эти формулы получены путем проецирования радиус-вектора rk точки Mk на ось Oxyz. Точка Mk предварительно разложена в точке O на компоненты, параллельные осям двух систем координат. gk = xk7 + ykJ + zkk = x’kt ‘+ y’kj’ + z’kE ‘, (32) Где xk, yk, zk — координаты точки Mk относительно системы координат Oxyz, а x’k, y’k, z’k — относительные координаты относительно Ox’y’z ‘. Проецирование вектора на произвольную ось в декартовой системе координат эквивалентно скалярному умножению этого вектора на вектор единичной оси.
Из теоремы об изменении импульса точки и системы при определенных условиях для внешней силы можно получить так называемый первый Интеграл системы дифференциальных уравнений некоторой точки и системы. Людмила Фирмаль
Умножьте единичные векторы координатных осей i, j, k непрерывно по обе стороны от (32) и рассмотрите таблицу углов осей, xk = fkT = (xkT ‘+ y’kj’ + z’kH ‘) T = xlcosa1 + yicosp1- t-zlcosy ;; Yk = rkJ = (x’kT ‘+ y’J’ + z’kH ‘) j = = x * cosa2 + / Jcosp2 + zjcosy2; zk = rkH = (x kT ‘+ y’ J ‘+ z kH’) H = = x; icosa3-b ^ sobPz + z * cozy3; Когда (33) используется для центробежного момента инерции Jxy, J * y = £ t m * x * -> ’* = (| Ei w * xi ^ cosa1cosa2 + + £ / n ^ l2) cosp1cosp2 + (£ / Mjzi ^ cosYjCOSYj, (34) потому что центробежный момент инерции относительно оси инерции равен нулю, Jx’r = (Liw, * x «J ‘* = o;» ´43’ * r * = °; L «= = E тк? Kx’k = (у.
- Поскольку оси координат Ox и Oy перпендикулярны друг другу, косинус их углов удовлетворяет условию Кос! cosa2 + cosр, cosр2 + cosуi cosy 2 = О, или потому что! cos y 2 = — (cos a t cosa 2 + cos p, cos p 2). Используйте это соотношение, чтобы удалить количества cosy и cosy2 и добавить их в первое слагаемое (34) с общим знаком (y’k-_y * 2) = 0, а второе (xj2-xJ2) = 0. Мы получаем Jx, = [ём * (xi2 +> ´ * 2) ~ «´Jj’l2 + zi2) jcosa1cosa2 + + [£ w * (x’2 +> ‘* 2) — (ДmAx’2 + z; 2)] cos₽1cos02 = (JZ. —Jx.) Cosa, cosa2 + (JZ. -J ^ JcosPiCosPj, здесь При £ w «(xi2 + jl2) = Jz ;; mk (y’k2 + z’k2) = Jx-; £» «» (zi2 + + xi2) = A.
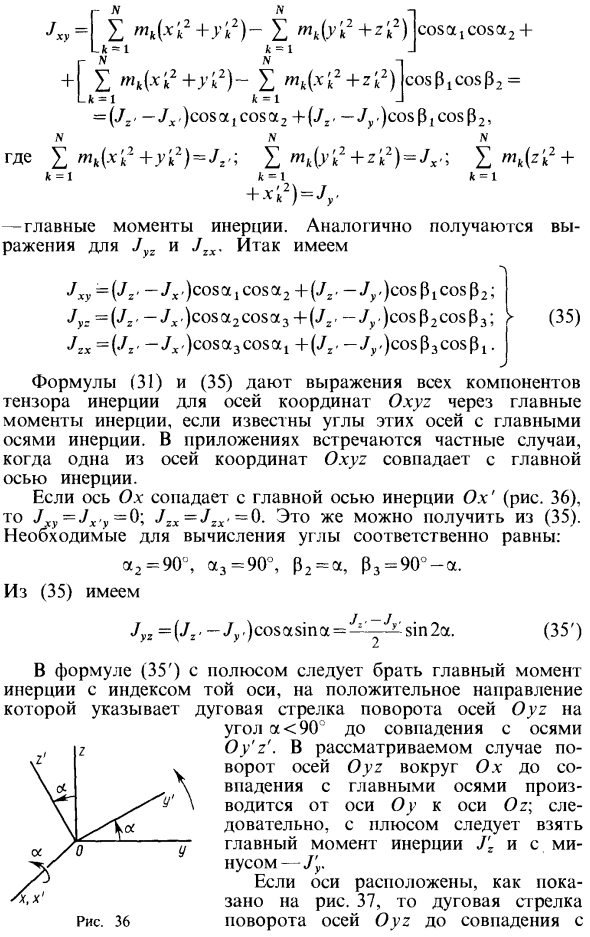
Основной момент инерции. Аналогичным образом получаются выражения Jyz и Jzx. Итак, мы Au = (A — A) cosaicosa2 + (A — ^ — Jcosp ^ osp ^ J,. = (JZ-Jx) cosa2cosa3 + (JZ.-J>) cosp2cosp3;> (35) Jzx = (Jf-Jx) cosa3cosa! + (/ ,.— J ^ jcospscosp,. Уравнения (31) и (35) дают уравнения для всех компонент тензора инерции оси Oxyz относительно главного момента инерции, если известны главные оси инерции и углы этих осей. В приложении существует особый случай, когда одна из координатных осей Oxyz совпадает с главной инерциальной осью. Когда ось Ox совпадает с главной инерциальной осью Ox (рис. 36), J, y = Jx.y = 0 ‘, JZX = JZX.
Для того чтобы произвольная система находилась в равновесии, сумма проекций внешних сил для каждой из трех осей и их моментов для каждой из трех осей равна нулю. Людмила Фирмаль
То же самое можно получить из = O (35). Каждый угол, необходимый для расчета, равен: A2 = 90 «, a3 = 90 °, p2 = a, p3 = 90 ° -a. С (35) Λ = (Λ—, ‘) cosasina = — ~ -sin2a. (35 ‘) В формуле с полюсом (35 ‘) главный момент инерции должен быть получен по индексу этой оси, а его положительным направлением является стрелка вращения оси Oyz на угол <90 °, пока он не совпадет с осью Oyz Обозначается В рассматриваемом случае вращение оси Oyz вокруг Ox до тех пор, пока оно не совпадает с главной осью, выполняется от оси Oy к оси Oz. Следовательно, плюс — главный момент инерции Фокса, минус — J’r.
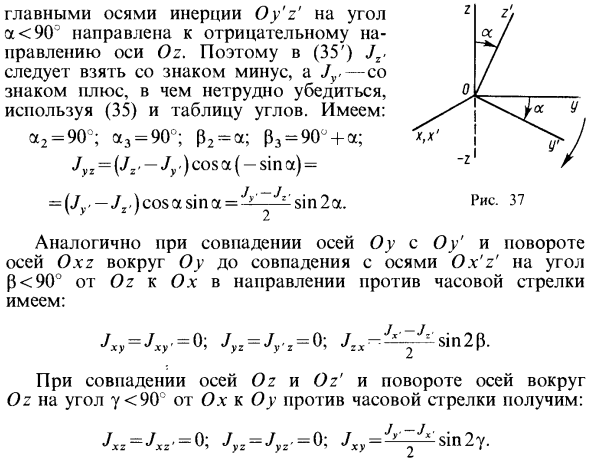
Когда оси расположены так, как показано на рисунке. 37, затем вращайте ось Oyz, пока стрелки дуги не совпадут Рисунок 36 Основная инерционная ось Oy’z ‘с углом a <90 ° ориентирована в отрицательном направлении оси Oz. Следовательно, при (35 ‘) Jz. Это знак минус, а Jy — знак плюс, что легко подтверждается с помощью (35) и таблицы углов. Существуют: а2 = 90 °; а3 = 90 °; р2 = а; р3 = 90 ° + а; J ^. Jcosaf-yn) = (Jy-Jy) потому что грех a = J> грех 2a. Аналогично, если ось Oy совпадает с Oy, а ось Oxz совпадает с осью Ox’z и вращается против часовой стрелки от Oz до Ox на угол p <90 °, то: jxji = jxy, = 0; / y2 = / y.x = 0; J „- ^ y ^ siii2p. При повороте вала на угол y <90 ° от Ox до Oy оси Oz и Oz совпадают следующим образом: sin2y.
Смотрите также:
Задачи по теоретической механике
| Свойства главных осей инерции | Простейшие свойства внутренних сил системы |
| Определение главных моментов инерции и направления главных осей | Дифференциальные уравнения движения системы |
