
Оглавление:

Динамические уравнения Эйлера
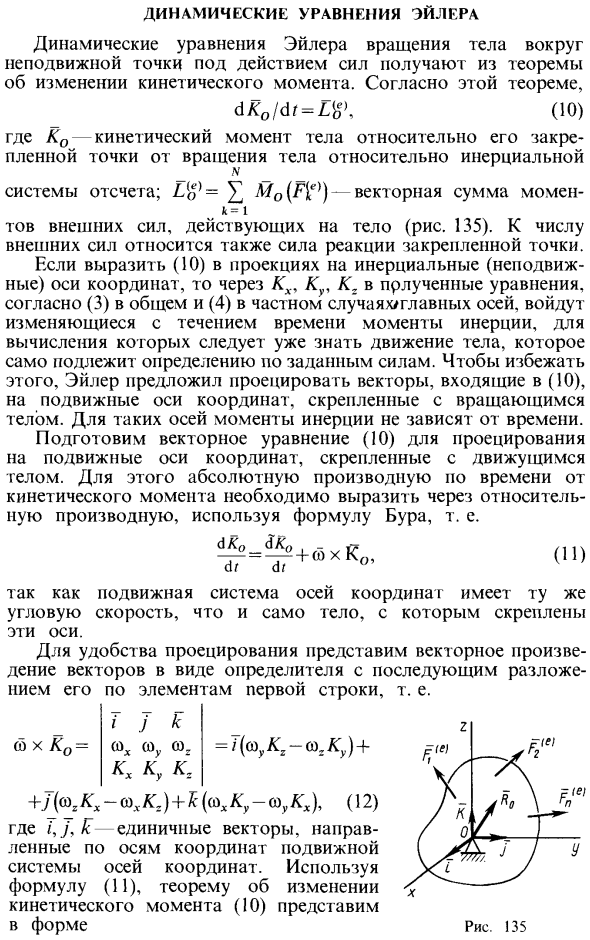
- Динамическое уравнение Эйлера для вращения объекта вокруг неподвижной точки под действием силы можно вывести из теоремы об изменении момента движения. Согласно этой теореме, dKoldt = L ^>, (10) Где Ko — момент движения тела относительно неподвижной точки от вращения тела относительно инерциальной системы отсчета. D> | = X — векторная сумма моментов Т внешней силы, действующей на тело (рис. 135). Среди внешних сил есть сила реакции в фиксированной точке.
Когда снаряд находится в движении, его центр тяжести движется так, как если бы в нем была сосредоточена вся масса тела и к нему были приложены все действующие на снаряд внешние силы. Людмила Фирмаль
Когда (10) представляется проекцией на инерциальную (фиксированную) координатную ось, моменты, которые меняются со временем, в зависимости от конкретного случая основных (3) и (4) главных осей, через Kx, Ku, K В том числе обычное уравнение инерции. Это расчет, который уже должен знать движение тела, и сам должен определяться силой, данной. Чтобы избежать этого, Эйлер предложил проецировать вектор (10) на движущуюся ось координат, прикрепленную к вращающемуся телу.
- Для таких осей момент инерции не зависит от времени. Подготовьте векторное уравнение (10) для проекции на оси подвижных координат, закрепленных на движущемся объекте. По этой причине абсолютная производная по времени от момента движения должна быть выражена как относительная производная по формуле Бора. + К. Болезнь.
Это связано с тем, что система перемещения осей координат имеет ту же угловую скорость, что и само тело, с которым эти оси связаны. Представлено векторное поколение для удобства проецирования Удалить вектор в виде определителя, затем развернуть до элементов первой строки, т.е. | J K I шхко = тсс шу юг = / (шу ^ 1-шхх) + | к * к, кг я + j (azKx-axKz) + H (axKy-ayKx), (12) где i, j и H — единичные векторы, ориентированные вдоль осей координат движущейся системы координат.
В разделе упражнений будет показано, что систему векторов можно всегда привести к таким двум векторам, из которых Ъдин лежит на произвольной прямой, не параллельной главному вектору. Людмила Фирмаль
Используйте уравнение (I) для выражения теоремы об изменении момента движения (10) в следующем виде: Рисунок 135 В проекции на ось подвижной координаты, прикрепленной к вращающемуся телу, с учетом (10 ‘) — (12), ^ + — (15) sog = f cos6 4-f, Это представляет проекцию угловой скорости вращения объекта на движущиеся координатные оси, прикрепленные к объекту через углы Эйлера f, 6, f и их производные по времени.
Смотрите также:
Задачи по теоретической механике
