
Оглавление:

Две основные задачи динамики точки
- Используя дифференциальное уравнение движения массы в конкретной системе координат, вы можете решить две основные задачи с точечной динамикой. Первое задание Зная массу точки и законы ее движения, вы сможете найти силу, действующую на точку. Фактически, например, дано уравнение движения декартовой координатной точки Далее проекция силы на оси координат определяется из дифференциального уравнения движения точки (9). Е
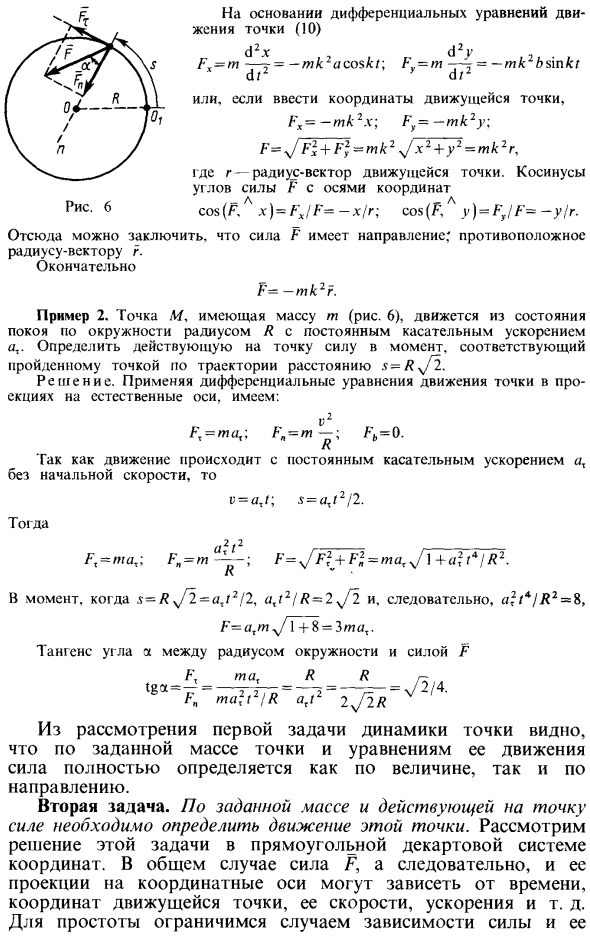
сли вам известна проекция силы на координатную ось, вы можете легко определить модуль упругости силы, угол силы и косинус координатной оси. Пример I. Точка М. Их Ohu — это уравнение Где a, b, k — постоянные положительные ве- Точка определяет силу, чтобы сделать это движение. Решения. Найти точечное уравнение траектории в координатной форме, исключив время из уравнения движения. самолет Рисунок 5 i + 3’2 / fr2 = cos2fct + sin2fcr = l. Полуэллипс Пример 2. Точка / / с массой m (рис. 6) движется из стационарного состояния по окружности радиуса с с постоянным тангенциальным ускорением a.
Когда все силы инерции точек системы исчезают по принципу возможного смещения статики, только в случае равновесия системы, до сих пор нет проблем с устойчивостью системы. Людмила Фирмаль
Определить силу, действующую на точку в момент, соответствующий орбитальному расстоянию s = Ry / l. Дифференциальное уравнение движения точки на профессиональной естественной оси. У нас есть: ускорение Идти вниз Kings s = Ry / 2 = att2l2, a, t2IR = 2y / 2, так что? / 4 / Я2 = 8 моментов Касательная угла a между радиусом окружности и силой I Рассматривая первую проблему точечной динамики, мы видим, что сила полностью определяется как по величине, так и по направлению в соответствии с заданной массой точки и ее уравнением движения.
Второе задание Учитывая массу и силу, действующую на точку, нам нужно определить движение этой точки. Рассмотрим решение этой проблемы в декартовой декартовой системе координат. В общем случае сила F и, следовательно, проекция на оси могут зависеть от времени, координат движущейся точки, ее скорости, ускорения и т. Д. Для простоты мы ограничимся зависимостью силы и ее оси. Проекция на координатные оси времени, координат и скорости. Форма дифференциального уравнения для движения точки (9) имеет вид ”* ■ r- * ■> ‘■ * • Y— • * •>’ • d); (9 ‘) Чтобы найти уравнение движения точки в декартовых координатах, нам нужно интегрировать систему из трех обыкновенных дифференциальных уравнений второго порядка.
Теория обыкновенных дифференциальных уравнений показывает, что решение одного дифференциального уравнения второго порядка содержит две произвольные постоянные. Для системы из трех обыкновенных дифференциальных уравнений второго порядка существует шесть произвольных постоянных: постоянная C C2, C3, C4, C5, C6. Координаты x, y, z движущейся точки после интегрирования уравнений уравнения (9) зависят от времени t и всех шести произвольных постоянных. x = f1 (t; Cl, C2, C3, C4, Cs, C6 \ -y y = fz (t, C3, C2, C3, C4, C5, C6);> (13) 2 = / s (/; c2, c2, c3, sl, c5, c6) .
Дифференцирующее уравнение (13) по времени определяет проекцию скорости точек на оси. vx = x = f’t (f, Ct, C2, C3, C4, C5, C6);) ^ = j = / ‘2 (CG, C2, C3, C4, C5, C6); (14) yy = y = D (f; C „Cr, C3, C4, C5, C6). J Таким образом, силовое задание не определяет специфическое движение массы, но выделяет весь класс движения, характеризуемый шестью произвольными константами. Действующая сила определяет только ускорение движущейся точки, а скорость и положение точки на траектории зависят от скорости, передаваемой в точку в начальный момент, и начальной позиции точки.
- Так, например, когда сопротивление воздуха не учитывается, точка вещества, которая движется вблизи поверхности земли под действием силы тяжести, имеет ускорение g. Тем не менее, точки имеют разные скорости и положения в пространстве в один и тот же момент, в зависимости от точки в пространстве, где началось движение, величины и направления начальной скорости, а также формы траектории. Чтобы подчеркнуть определенный тип движения массы, вам нужно установить дополнительные условия, которые могут определить любую константу.
Это вообще 6. Такие условия обычно задаются как Вызывается начальные условия, то есть определенный момент времени, например I = 0 (рис. 7), координаты движущейся точки x0, y0, z0 и ее скорости vOx, проекция, t> Z * 7) (| 5) * = «О; у =» 0). ; Z = воз-J Рисунок 7 Использование этих начальных условий Используйте уравнения и (13) и (14), чтобы получить следующие шесть уравнений, чтобы определить шесть произвольных постоянных. * o = / 1 (0; c15 C2, C3, C4, Cs, C6); Y0 = / 2 (0; C1, C2, C3, Cl, C5, C6); zo = / 3 {0; G, C2 , C3, C4, C5, C6) vOx ^ f’i (0; citc2, …, wYy = A (0; C „C2, …. C6); »O, — / s (0; c„ c2, …, c6). (16).
Поэтому система отсчета, в которой материальная точка покоится, должна иметь соответствующую систему отсчета для материальной точки, поскольку относительная скорость и ускорение равны нулю. Людмила Фирмаль
Если система уравнений (16) удовлетворяет условию разрешимости, из него можно определить все шесть произвольных постоянных. Начальное условие вида (15) определяет единственное решение системы дифференциальных уравнений (9) при условии соответствующего условия дифференциального уравнения. Другие формы условий, такие как указание двух точек, через которые должна проходить траектория движущейся точки, могут предоставить несколько решений, которые удовлетворяют этим условиям, или не могут найти единого решения.
Когда точка движется в плоскости Оху, существуют два дифференциальных уравнения движения. Решение этих уравнений включает в себя четыре произвольные постоянные. Константа определяется из начальных условий r равно 0. x = x0; y = y0; x = Vox; j> = »или Для линейного движения точки существует только одно дифференциальное уравнение, и решение содержит две произвольные постоянные. Чтобы определить их, необходимо установить начальные условия. r равно 0. x = x0; x = vOx. Задача интегрирования системы дифференциальных уравнений (9 ‘) при заданных начальных условиях в общем случае достаточно сложна.
Даже в простейшем случае Если существует только одно линейное движение или дифференциальное уравнение, решение может быть точно выражено квадратурой только в том случае, если сила имеет конкретную зависимость от времени r, координаты x и скорости v. Поэтому важно определить такое соотношение из системы уравнений (9 ‘), которая является результатом этой системы и содержит производную от координат точки первого порядка. Такое отношение, например, в виде / p; x, y, z; x, y, z).
C называется первым интегралом системы дифференциальных уравнений (9 ‘) -системой (9’) Задача интегрирования упрощается, если можно найти три независимых первых интеграла. Три дифференциальных уравнения первого порядка, представленные этими первыми интегралами. Далее из так называемой общей теоремы динамики в некоторых частных случаях движения точки мы рассмотрим, как получить первый интеграл дифференциального уравнения движения точки. Чтобы уточнить характеристики решения, которое применяет значение, второй основной проблемы динамики, мы рассмотрим решения для линейных и изогнутых движений массы.
Смотрите также:
Задачи по теоретической механике
| Системы единиц | Основные виды прямолинейного движения точки |
| Дифференциальные уравнения движения материальной точки | Криволинейное движение материальной точки |
Если вам потребуется помощь по теоретической механике вы всегда можете написать мне в whatsapp.
