
Оглавление:

Криволинейное движение материальной точки
- В случае искривленного движения вдоль плоскости существуют два дифференциальных уравнения для движения точек в декартовой системе координат, а в общем случае пространственного движения — система из трех дифференциальных уравнений. Дифференциальное уравнение кривой движения точек интегрируется относительно просто, когда каждое из этих уравнений интегрируется независимо от других уравнений, а зависимость проекции результирующей силы от времени, координат и скорости равна 3.
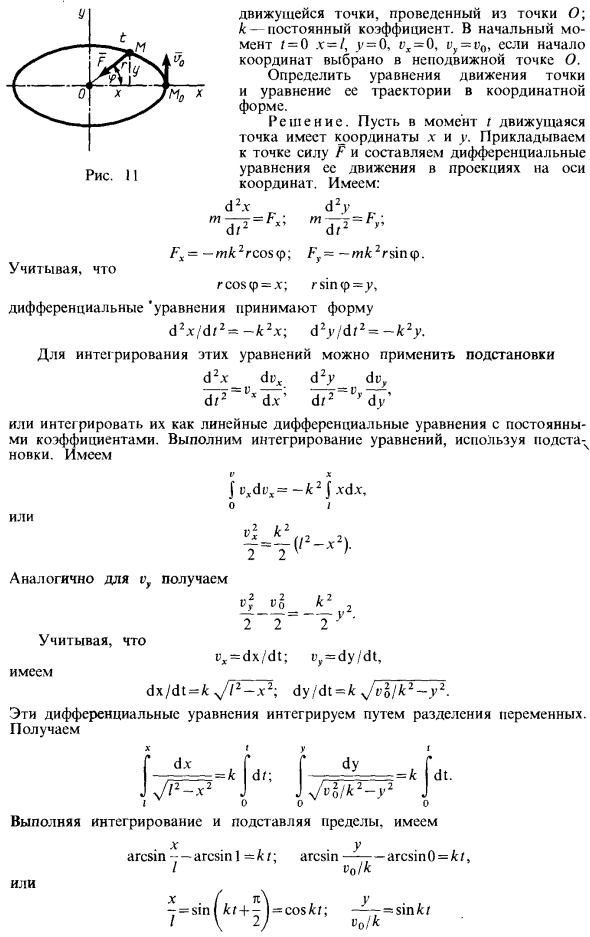
Возможен один из двух рассмотренных случаев. Рассмотрим пример изогнутого движения точки на плоскости и в пространстве. Пример 1. Массовая точка под действием силы притяжения F (сила упругости) составляет Масса m (рис. 11) движется по плоскости Закон с фиксированной точкой F = —mk2r, ke Аттракцион, когда O r — радиус-вектор Движущаяся точка, оттянутая из точки O; k, является постоянным коэффициентом. Если начало координат выбрано в фиксированной точке O, в первый момент 1 = 0 x = 1, y = 0, x = 0, b, = 0. Определить уравнение движения точки и уравнение ее траектории в координатной форме.
Это неудивительно, поскольку в точке, состоящей из линии тока, скорость точки сплошной среды направлена тангенциально к поверхности токовой трубки. Людмила Фирмаль
Дифференциальное уравнение d2x / dP = — * Для интеграции е. Пусть x и y перемещают координаты в момент времени t. Применить F и создать дифференциальное уравнение для этого движения путем проекции на оси. У нас есть: Посмотрите вверх Линейные дифференциальные уравнения путем постоянного интегрирования уравнений с использованием Разделите переменные и интегрируйте уравнение. Эти различия Скорость ё. В результате Координаты. -kmvy = — кто; -mg — kmvx—- Минус проекции сопротивления указывает эти символы. Вопреки признакам прогнозирования скорости, это было принято положительно.
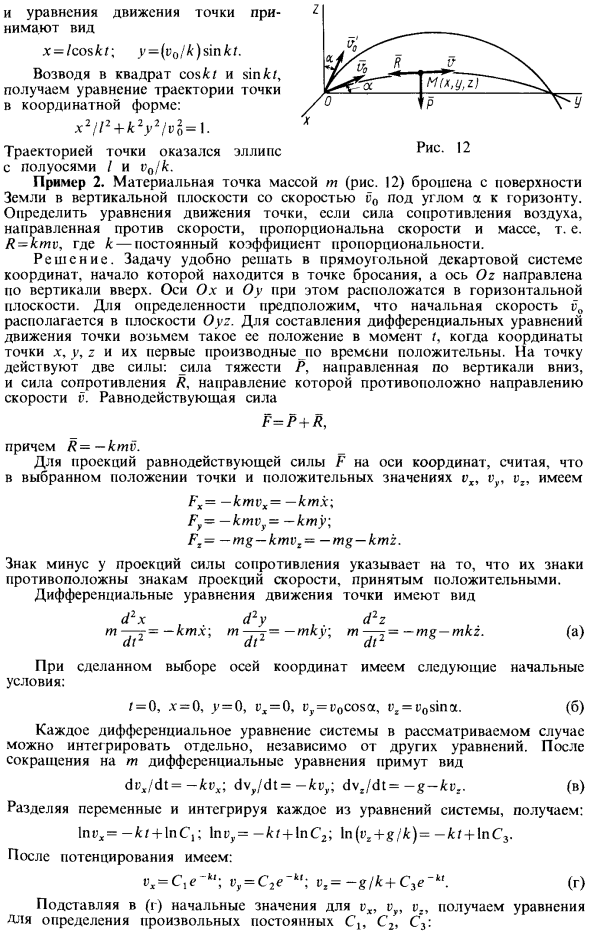
- Форма дифференциальных уравнений для точечного движения t — = — CTX- T -TKU- мг мки. При выборе оси координат существуют следующие начальные условия: (А) ‘= 0, , = 0, tj, = i> 0cosa, ”, = posina. (B) В рассматриваемом случае каждое дифференциальное уравнение в системе может быть интегрировано независимо от других уравнений. После уменьшения m дифференциальное уравнение принимает вид: di> x / dt-fcex; dv, / dt = -kvt; dv, / dt = -g — kv. (С) Разделение переменных и интегрирование каждого уравнения в систему дает: ln »x = -fc / + lnC ;; ln», = -kt + lnC2; ln (», + g / A = -Lg + 1nC3. «X = C, e-«; 1>, = C2- * ‘; s, -g / * + C3₽-‘ ‘. (G) Подставим начальное значение vx в (d) и получим уравнение Чтобы определить любую константу Cx, C2, C3: E = cos = C2; i> osina = -g / k + C3.
Интегральная константа имеет следующее значение: C = 0; C2 = i> 0cosa; C3 = g / k + Bosna. Подставляя интегральную константу (d) и заменяя проекцию скорости на координатную ось производной координаты по времени, она получается следующим образом. dx / dt = 0; dy / dt = «0cosae ‘»‘; 1 dz / dt = (g / k + i> osina) e «» -g / k.J Отделение переменных (r´) и интегрирование каждого из дифференциальных уравнений первого порядка, (G ‘) (D) Подставим начальное условие (e) и получим уравнение, определяющее постоянную интегрирования C «. Sabusuta Найти здесь: ) / L; C6 = (1 / L) и f * r + oyap). (E) получить желаемое уравнение (Е) Провести исследование движения точки.
Таким образом, если точка, описывающая эллипс, образуется при одновременном действии всех этих пяти сил при любых начальных условиях, то давление эллипса обратно пропорционально радиусу кривизны. Людмила Фирмаль
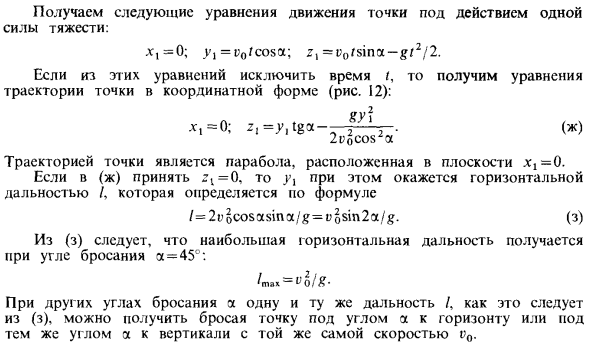
Из уравнения движения (e) существует тенденция передать i до предела как k и получить i. Уравнение движения точки только под действием силы тяжести. В этом случае x, zb ‘- координаты точки По общему правилу в формуле (е). для (Д / дк дк / дк Перед Для того, чтобы преобразовать ад ,. (D / d *) (l-e- “) —-; + i> osma bm —————- = Получим следующее уравнение движения точки под одним действием (G) * i = 0; yi = t> 0’cos «; zt = i> o’sina-gr2 / 2.
Если время I исключается из этих уравнений, точечные уравнения траектории получаются в координатной форме (рисунок 12). 2i> ocos a Локус точки — это парабола в плоскости x = 0. Если вы получите zl = 0 в (x), вы получите y, но это будет горизонтальный диапазон, который я определил по формуле / = 2vocosasina / g = «§sin2a / g. (H) Из (h) максимальный горизонтальный диапазон получается при угле литья i = 45 °. Для других углов броска я иду из (ч) может бросить Диапазон g /, угол a или меньше относительно горизонтальной линии следующим образом
Смотрите также:
Задачи по теоретической механике
| Две основные задачи динамики точки | Движение несвободной материальной точки |
| Основные виды прямолинейного движения точки | Движение точки по поверхности |
Если вам потребуется помощь по теоретической механике вы всегда можете написать мне в whatsapp.
