
Оглавление:

Формулы для вычисления главного вектора и главного момента
- Для любой системы сил Г1ЭГ2, FN главным вектором R является векторная сумма этих сил. 3 i = 1. Основным моментом Эо является сумма векторных моментов силы относительно центра торможения. 4 нынешний век i = 1 гора R изображается геометрически как замкнутый силовой полигон, построенный на заданной силе.
Поскольку угол поворота увеличивается со временем, он становится положительным, когда тело вращается против часовой стрелки, и отрицательным, когда тело вращается по часовой стрелке.Каковы необходимые и достаточные условия приведения тела в неупорядоченное состояние. Людмила Фирмаль
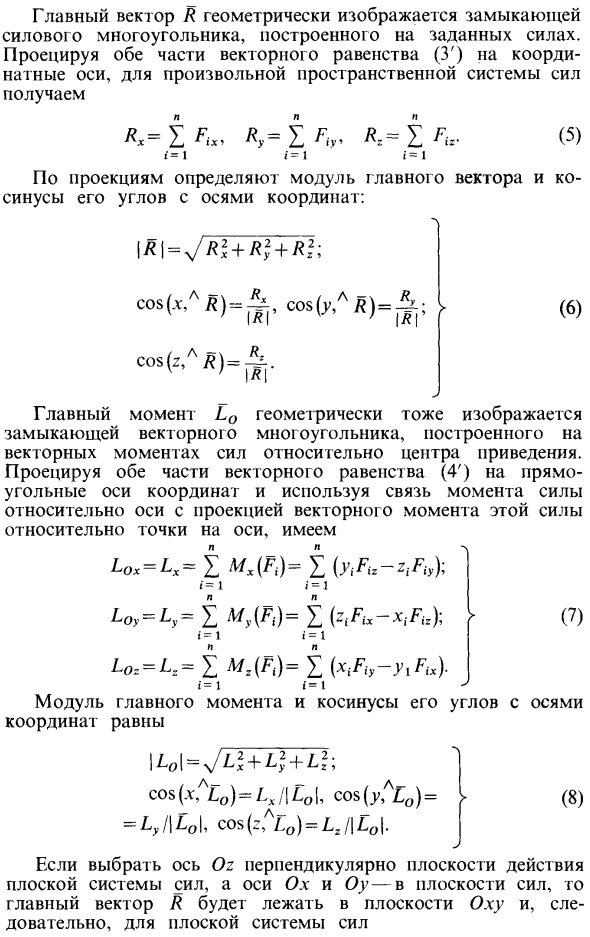
Для любой пространственной системы сил, которую мы получаем, мы проецируем обе стороны векторного уравнения 3 на координатные оси х = я х, .= Я. е лх, е лх. 5 = 1 1 = 1 1 = 1 Проекция определяет Косинус модуля основного вектора и его угол к координатным осям. СО8 х, ЛЯ = , СО8 6ЛЛ =А С05 все =. 6 Главный момент Lo геометрически изображается в виде замкнутого векторного многоугольника, построенного на векторном моменте силы относительно приведенного Центра.
- Обе части векторного уравнения 4 проецируются на декартову ось, используя соотношение между моментом силы относительно оси и проекцией этого момента вектора силы относительно точки на оси. LOx = Lx = E WX F, = E y Fiz z. fiy. 1 = 1 1 = 1 П0. = Ly = E L DG = E Zifix X. физ я = 1 я = л Кровать Loz = Л. = ЕК Фи = Е я = Л 1 = 1 Дж 7 Косинус угла между модулем и осью основного момента Координаты равны потому что Х, ло ЛК ЛО, потому что г, о лы ЛО, Ц0 Ео = В1 В0. 8.
В равновесном состоянии сила, действующая на твердое тело в равновесии на шероховатой поверхности объекта на равновесной шероховатой поверхности, есть еще неизвестная сила реакции, то есть сила трения на шероховатой поверхности. Людмила Фирмаль
Ось Oz перпендикулярна плоскости действия силовой плоской системы, а оси Ox и Oy в силовой плоскости, главный вектор R находится в плоскости Oxu, а следовательно, и в случае силовой плоской системы 9. ГХ = исправить е, ры = И. Ли, L2eO Л = Vy1 + ч, потому что Х, АР = х, С08 Я = Я, Д. Главный момент плоской системы сил перпендикулярен основному вектору, а следовательно, параллелен оси Oz. И затем… Lx = 0, Ly = 0, L0 = L, = ЗД = Z A 0 f , 10 i = 1 i = 1. Где Ло является ключевым моментом алгебраических.
Смотрите также:
Теоретическая механика — задачи с решением и примерами
| Приведение произвольной системы сил к силе и паре сил | Условия равновесия системы сил |
| Приведение плоской системы сил | Условия равновесия системы сил в векторной форме |
Если вам потребуется заказать теоретическую механику вы всегда можете написать мне в whatsapp.
