
Оглавление:

Интегрирование дифференциального уравнения собственных колебаний
- Разделив обе части уравнения (4) на a и показывая положительное значение c / a = k2, получим дифференциальное уравнение q + k2q = 0 для собственных линейных колебаний системы с одной степенью свободы в окончательном виде , (6) Постоянное значение k = y / s [a называется частотой циклических (или периодических) колебаний. Для линейной вибрации точки массы, x + A2x = 0, где k2 = c0 / m. Размерность круговой частоты k может быть установлена из уравнения (6). с того времени тогда с [G’G Когда время t выражается в секундах. Его размеры не зависят от обобщенных координатных размеров.
Частота круга выражается в тех же единицах, что и угловая скорость. В частности, единица круговой частоты вибрации в точке k равна s-1. Дифференциальное уравнение (6) представляет собой однородное линейное квадратное уравнение с постоянными коэффициентами. Решение можно найти в виде q = eu. Подстановка этого уравнения в (6) дает характеристическое уравнение уравнения (6). V + fc2 = 0. Это квадратное уравнение имеет два чисто мнимых корня: Xi, 2 = + ki. На основании теории дифференциальных уравнений решение уравнения (6) можно выразить как: q = Ct cos kt + C 2 sin kt (7) И для обобщенной скорости 4 = -Qfcsin kt + C2kcoskt.
Полученное нами выражение для скорости показывает, что на одной и той же высоте, как при движении вверх, так и при движении вниз, точка имеет скорость, одинаковую по абсолютному значению. Людмила Фирмаль
Произвольные постоянные Cx и C2 определяются из начальных условий r = 0, q = q0, q = q <). Где q0 и q0 — начальные значения обобщенных координат и обобщенной скорости. Используйте выражения q и q с r = 0, чтобы получить Ci = <70; C2 = qolk. Подставляя эти значения в (7), г =? 0cosAr + ^ sinA7. (8) Уравнение (8) является одной из двух основных форм естественной вибрации. Для изменения массы, x = x0 cos kt + j sin kt. Где х0 и т? 0 — начальное отклонение и начальная скорость точки от положения равновесия. Выразите выражение q в другом так называемом формате амплитуды. q = грех (Lr-a) = грех a cos £ t + I cos sin kt.
Получить выражение из сравнения этого выражения с новой константой (7) Ct = / Isina; C2 = ^ cosa. Отсюда A-y / Cj + Cj; sina = C1M; cosa = C2 / A (9) Иногда рассчитывается tga = Cl / C2. Подстановка выражения для начального значения в (9) вместо Ct и C2 дает следующее: Значение А считается положительным и называется амплитудой вибрации. Определить максимальное отклонение обобщенных координат от положения равновесия, соответствующего q = 0. Обобщенная координата q изменяется от + A до -A. Безразмерная постоянная а называется начальной фазой вибрации. Это значение фазы колебаний (кт-а) при / = 0.
Начальная фаза может варьироваться от 0 до 2н. Чтобы определить начальную стадию a из начальных условий, вы можете использовать любую комбинацию двух тригонометрических функций (10), таких как sin a и cosa. Для тригонометрической функции, такой как tga, вы получаете два различных значения для a. Линейная вибрация в амплитудном формате, которая учитывает начальные условия, может быть выражена в конечном формате. ^ y ^ n ^ + ags ^). X = ^ Xo-t-p sin (kt + arctg ~ Движение системы, определяемое формулой (8) или ее эквивалентной амплитудой (11), называется гармонической вибрацией.
Гармоническая вибрация — это вибрация, в которой обобщенные координаты меняются со временем в соответствии с законом синуса или косинуса. Вы можете перейти к косинусу, изменив фазу на n / 2 от синуса. Естественная линейная вибрация системы с одной степенью свободы является гармоникой. Массовые точки под воздействием линейной восстанавливающей силы также совершают гармонические колебания. Обобщенная координата q изменяется в соответствии с законом синуса. Закон синуса является периодической функцией с аргументом минимального периода 2l. Следовательно, q — периодическая функция.
Значение периода вибрации m переменной I получается из условия, что добавление периода к этой переменной изменяет фазу вибрации на минимальный период синусоиды 2n. У нас есть L (f + m) + a = L / + a + 2l; m = 2l / A = 2l ^ / a / s (12) Для линейной точечной вибрации период равен m = 2lx / w / s0. Период вибрации выражается в единицах времени, например, в секундах. Обратная величина периода v = 1 / t называется частотой колебаний. Частота вибрации обычно определяется количеством вибраций в секунду или герц (Гц). Частота 1 Гц соответствует одной вибрации в секунду.
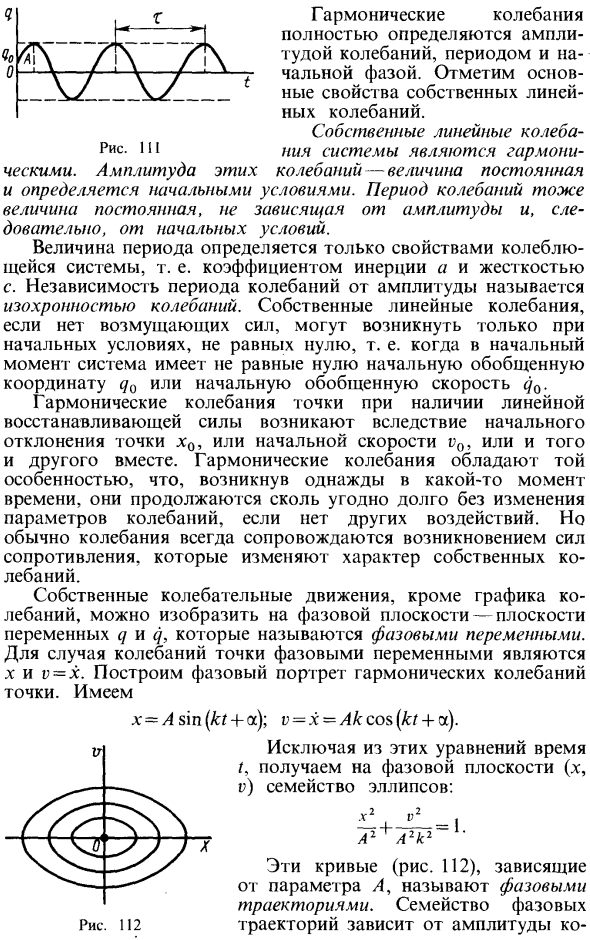
- Круговая частота k выражается периодом вибрации и следующей формой частоты. A = 2l / t = 2lu. (13) Из (13) видно, что круговая частота k — это частота времени, равная 2 л с. Рисунок 111 представляет собой график гармонических колебаний системы с одной степенью свободы. Это синусоида. Гармоническая вибрация полностью определяется амплитудой, периодом и начальной фазой вибрации. Обратите внимание на основные характеристики естественной линейной вибрации. Рисунок 111 Амплитуда этих собственных линейных колебаний системы является гармонической величиной постоянной вибрации И определяется начальными условиями.
Период колебаний также является постоянным значением и не зависит от амплитуды и, следовательно, начальных условий. Величина периода определяется только характеристиками вибрационной системы, то есть коэффициентом инерции а и жесткостью с. Независимость периода вибрации от амплитуды называется виброизохронизмом. Уникальная линейная вибрация. При отсутствии возмущающих сил они могут возникать только при начальных условиях, которые не равны нулю. То есть в первый момент система имеет ненулевую начальную обобщенную координату q0 или начальную обобщенную скорость q0.
Таким образом, в рассматриваемом случае момент инерции вычисляется с помощью простого интеграла. Изменение момента инерции системы относительно оси, перемещающейся параллельно самой себе. Людмила Фирмаль
Гармоническое колебание точки при наличии линейной восстанавливающей силы вызвано начальным отклонением точки x0 и / или начальной скоростью v0. Гармоническая вибрация имеет характеристику, заключающуюся в том, что, как только она возникает в определенной точке, она продолжается до тех пор, пока не произойдет изменение параметров вибрации, если не будет другого влияния. Однако обычно вибрация всегда сопровождает сопротивление, и природа естественной вибрации меняется. В дополнение к графику колебаний его колебательное движение может быть представлено на фазовой плоскости — плоскости переменных q и q, называемых фазовыми переменными.
Для точечных колебаний фазовыми переменными являются x и v = x. Давайте создадим фазовый портрет гармонической вибрации точки. У нас есть x = грех (£ f + a); v = x = Akcos (kt + v). Рисунок 112 Удалите время t из этих уравнений, чтобы получить эллиптическое семейство в фазовой плоскости (x, p). Эти кривые (рис. 112), в зависимости от параметра A, называются фазовыми траекториями. Семейство фазовых траекторий зависит от следующих амплитуд: Вариация определяется начальными условиями. Каждая фазовая траектория соответствует паре начальных значений x0 и v0. Точка равновесия на фазовой плоскости соответствует началу координат x = 0, a = 0. Когда точка массы гармонично колеблется, ее координата x и скорость v изменяются со временем.
В результате каждый момент на фазовой плоскости соответствует определенной позиции точки изображения с координатами x и V. В течение одного полного гармонического колебания (периода) точка изображения представляет эллипс на фазовой плоскости. Отметим, что замкнутые фазовые траектории соответствуют периодическим колебаниям на фазовой плоскости и наоборот. Тип фазовой траектории характеризует устойчивость или неустойчивость положения равновесия и малость вибрации. Консервативные системные фазовые траектории могут быть построены с использованием интеграции энергии.
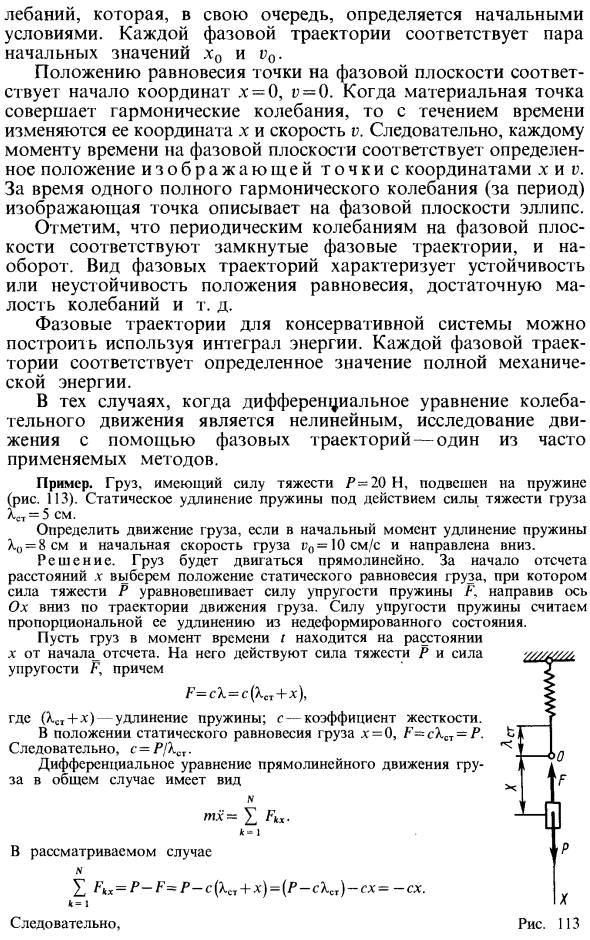
Каждая фазовая траектория соответствует определенному значению полной механической энергии. Если дифференциальное уравнение для колебательного движения является нелинейным, изучение движения с использованием фазовых траекторий является одним из наиболее часто используемых методов. mx = —cx \ x + fc2x = 0; k = ^ / s! т. Если вы не выберете место статического равновесия в контрольной точке, уравнение будет иметь постоянную правую часть. Другими словами, это становится неравномерным.
Решение дифференциального уравнения можно выразить в виде x = C, cos /: r + C2sinJ: l; «= X = -C, * -infc (+ C2 * cosb. Константы C и C2 определяются начальными условиями. Время 1 = 0, начальная скорость x = b0 = 10 см / с; х = х0 = х0-х „= 8-5 = 3 см; A = Us / m = 7y / 1 ^ = 7980/5 = 14 с’1. Константа С ‘! И с2. Если выражение для x и x равно 1 = 0, значение равно C | = xo = 3cm. C2 = »o / * = 0,71 см Уравнение движения груза принимает вид x = 3cos 141 + 0,71 sin 141 см.
Используйте формат амплитуды. амплитудное 4 = х / с? + C? =, / 9 + 0,50 х 3,08 см. Начальная фаза а. sin a = C, l = 0,97> 0; cos a = C2 / A = 0,71 / A> 0. Следовательно, угол a находится в первой четверти и, в зависимости от значения (например, sina), a = 1,34 = 0,43 л. Уравнение движения для нагрузки в амплитудной форме имеет вид , <= 3,08 см (14 (+ 0,43 rt) см). Период собственной вибрации нагрузки составляет m = 2n / * = 0,45 с.
Смотрите также:
Задачи по теоретической механике
