
Оглавление:

Влияние линейного сопротивления на малые собственные колебания системы с одной степенью свободы
- Линейное сопротивление и функция рассеяния. Если точка сопротивления действует на точку в системе с одной степенью свободы в дополнение к потенциальной силе, дифференциальное уравнение Лагранжа имеет вид »Gngv ‘+ s’- <| 4> Где Qn = —dP / dq — обобщенная сила потенциальной силы. b®-Обобщенная сила сопротивления. Если точечное сопротивление Rk системы линейно зависит от скорости этих точек, рассмотрите возможность улучшения линейного сопротивления. Постоянный коэффициент сопротивления. Рассчитать обобщенное сопротивление. Согласно обобщенному определению силы, Для дальнейшего преобразования мы используем тождество Лагранжа, полученное путем вывода уравнения Лагранжа [Справочное уравнение (32) § 9 гл. 6] : dfjdq = drkldq. получить .
Вводим обозначения. (15 ‘) 1 тонна Функция Φ называется функцией диссипации или функцией Рэлея. Эта функция структуры аналогична кинетической энергии системы. Включен только коэффициент сопротивления, а не точечная масса. Из обобщенного сопротивления (15 ‘) -ZF / id Выразите функцию Φ с помощью q и q. Учитывая, что (16) У нас есть У нас есть Где B = B (q) =. Функция B зависит только от q, а не от того, как величина Srk / dq не зависит от q. Чтобы уточнить физический смысл диссипативной функции, получим соотношение энергий, которым она удовлетворяет. Для этого умножьте q на уравнение Лагранжа (14) , d dP (I>.
Приближенность невесомости рассматриваемых материальных систем обусловлена тем, что различные системы материальных объектов не свободны от сил сопротивлений сред, в которых они движутся. Людмила Фирмаль
Выполните серию преобразований. Учитывая, что (17) У нас есть Как хорошо = 72 ^ (?) 92; И поэтому В случае стационарного потенциального поля потенциальная энергия зависит от времени только через координату q. так (20) Преобразовать первое слагаемое в (17) с учетом (18). У нас есть Подставляя (18) — (21) в (17) Если T является функцией q и q только в зависимости от t, После перевода dn / dz влево (2Г) и сложения полученных терминов 1 (2T-T + P) = -2F или 1 (T + P) = -2F. Когда вводится полная механическая энергия E-T — * — P, в конечном итоге получается соотношение энергии. d £ / dz = -2F. (22) Это соотношение показывает, что функция рассеяния Φ характеризует скорость уменьшения полной механической энергии системы из-за действия линейной силы сопротивления. Уменьшение полной механической энергии обозначается знаком минус в (22). Согласно (16) функция диссипации Φ является положительной величиной.
Расширить набор диссипативных функций вблизи положения равновесия системы. Следовательно, согласно (16 ‘), функция B (q) должна быть разложена в степенной ряд q вблизи 7 <0. e (´) -e <°) + (sV + (s?) 0T + — Подставляя это расширение в (16 ‘) и оставляя только B (O), ® = 72W2 = 1W. (23) Здесь введено обозначение ц = В (0). Положительная постоянная q называется обобщенным коэффициентом сопротивления. Дифференциальное уравнение малого естественного движения под действием линейного сопротивления. Вблизи положения равновесия системы существуют следующие уравнения для кинетической и потенциальной энергии и функции диссипации: T = aq2 / 2; II = cq2l2 \ Φ = q ^ 2/2. Подставим их в уравнения Лагранжа И учитывая Получить дифференциальное уравнение aq = -cq-pq. Эго — это приближенное уравнение.
При получении все условия для второго и последующих заказов будут уничтожены. Разделив обе части уравнения на a и введя обозначение k2 = cla, 2n = p / a, получим дифференциальное уравнение для движения системы в окончательном виде после переноса всех членов уравнения влево. q + 2nq + k2q = 0. (24) Константа k = ^ fc [a — круговая частота собственной вибрации системы без учета сопротивления. Величина n = q / (2a) называется коэффициентом затухания. Его размеры такие же, как и у частоты циркуляции. Вместо n можно использовать m0 = 1 / u. Это называется постоянной времени затухания и имеет временное измерение. Интегрирование дифференциальных уравнений движения. Дифференциальное уравнение (24) представляет собой квадратное однородное линейное уравнение с постоянными коэффициентами.
Решение должно быть найдено в виде q = eu, а постоянная X определяется из характеристического уравнения X2 + 2 и X + X2 = 0. Это получается после подстановки решения в дифференциальное уравнение. Есть два пути к характеристическому уравнению. ki.2 = -n ± Jn2-k2. (25) Есть три случая. 1) n k — для высокого сопротивления, 3) n = k — для критического сопротивления. Рассмотрим эти случаи индивидуально. Затухающая вибрация. Если n ‘+ C? E , * i’) = e_n ‘(C1 cosk, z + C2sink1z), (26) где С , CJ , С и С2 — произвольные постоянные. Решение (26) также может быть выражено в различных форматах амплитуды. q = Ae- » sin (, / + «), (27) Где Лиа — произвольная постоянная. Когда вы открываете общий знак, 9 = Le’u8t (k1 <- | -a) = e «‘,’ (Лsinаcosk (/ + Лcosаsinг).
Сравнение этого уравнения с (26) дает постоянное реляционное выражение. L =% / C2 + C2; вши = C1 / L; cosa = C2 / L; lga-ClIC2- (28) Константы Ct, C2 и Л и А соответственно определяются из начального условия r = 0,?. =? 0, q = qo- Дифференцирование по времени (26) q = —ne ~ «‘(Ct coskjJ + Cjsinkj /) + e ~»‘ (-Ciklsinklt + C2klcoskl t). (29) Использование уравнения (26) для q и использование (29) для q = / 0 дает уравнение, которое определяет C1 и C2. q0 = C; q0 = ~ nCi + ktC2. Из них G =? O; C2 = (? O + nq0) / k1 = (q0 + nq0) / y / k2-n2. Поэтому константа Ли в начальном условии выражается в следующем формате: Рисунок 114 Значение A является положительным.
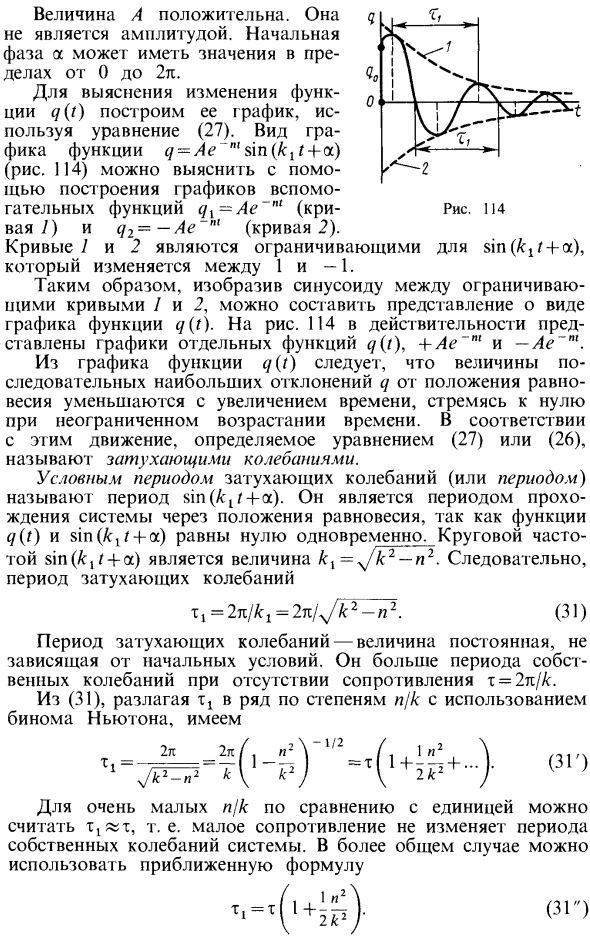
Это не амплитуда. Начальная фаза a может иметь значение в диапазоне 0-2p. Чтобы уточнить изменение функции q (t), создайте график, используя уравнение (27). Графическая форма функции ^ = ^ e _ » sin (fc1t + a) (рис. 114) получается путем построения вспомогательных функций qi = Ae ~ a ‘(кривая 1) и q2— ~ Ае (кривая 2) Можно определить. Кривые / и 2 ограничивают грех (£ tr + oc) и варьируются от 1 до -1. Поэтому, поскольку мы нарисовали синусоидальную волну между предельными кривыми I и 2, мы можем получить представление о форме графика функции q (t). На рисунке 114 фактически представлен график отдельных функций q (t), + Ae ~ m и -Ae ~ m. Из графика функции q (J) значение непрерывного максимального отклонения q от положения равновесия уменьшается с увеличением времени и стремится к нулю с неограниченным увеличением времени.
- Поэтому движение, определяемое уравнением (27) или (26), называется затухающим колебанием. Условный период (или период) затухающего колебания называется периодом sin (Atf + a). Поскольку функции q (t) и sin (& tt + a) одновременно равны нулю, это период, в течение которого система проходит через положение равновесия. Круговая частота sin (fcjr + a) равна ki = y / k2 ^ –n1. В результате период затухающей вибрации m 1 = 2n / kt = 2n / y / k2-n2. (31) Период затухающих колебаний является постоянной величиной, которая не зависит от начальных условий. Период собственной вибрации при отсутствии сопротивления х = 2н / к. Из (31), используя бином Ньютона для разложения m в степенной ряд н / с, (31 ‘) Для очень малых с / с по сравнению с единицей можно предположить, что небольшое сопротивление не меняет период Естественная вибрация системы.
В более общем случае вы можете использовать приблизительное выражение На самом деле функция q (t) не является периодической. Это потому, что не существует величины m1 (выполняется ли условие периодичности? (Z + t1) = ^ (Z)). Определим момент, когда функция q (t) достигнет максимального и минимального значений. В это время q (t) = O. Если дифференцировать уравнение q (t) от (27) и сделать производную равной нулю, получим следующее уравнение: <7 = / le-n, [-Hsin (fciZ + a) + £ 1 cos (A: 1 / + a)] = 0 Поскольку e ~ m равен нулю только при z = oo, соответствующее время определяется из условия, что выражение в квадратных скобках равно нулю. -n sin (kt t + a) + Л1cos (kt t + a) = 0, или tg (Ar1z + a) = fcl / n.
Точка будет оставаться все время в этом положении, так как если бы юна начала двигаться, то сразу возникли бы силы трения и сопротивления среды, которые вновь обратили бы скорость в нуль. Людмила Фирмаль
Если tt является одним из определенных значений I, которые удовлетворяют этому тригонометрическому уравнению, все другие определенные временные значения удовлетворяют следующему соотношению, учитывая, что тангенциальный период равен l. klt + a = (kltl + ct) + mn или Где m — любое натуральное число. Таким образом, когда функция q (t) достигает максимального и минимального значений, она образует бесконечную последовательность значений ‘I> h = G + p t3 = Zi + 2 ^ — + …. Из графика функции q (t) (см. Рис. 114) видно, что между двумя максимальными значениями существует одно минимальное значение, и наоборот. Таким образом, два соседних максимума функции q (t) возникают после периода, равного 2 л / А.
Это согласуется с периодом t затухающих колебаний. Два последовательных минимальных значения также разделены интервалом времени, равным t. Переменная Ae ~ m называется условной амплитудой затухающей вибрации. Это не максимальное значение функции q (t). Устанавливает закон изменения условной амплитуды Ae к w при изменении времени в периоде Tj. Если условная амплитуда Ax = Ae ~ m ‘в момент времени / 1, после периода, равного периоду затухающих колебаний Tj, то 2 = / 1 + т1 Это верно в два разных времени в зависимости от периода t. На самом деле, если для = 4- / IT Am = Ae для «-e’m» », где m натуральное число больше 1 и fM + l = G + (W ‘+ *) Tl Rm + 1 = Ae ~ «» e ‘, m +’» «■ = Ate ~» x ‘.
Поэтому непрерывное значение условной амплитуды в разные моменты времени в зависимости от условного периода сопровождается уменьшением геометрической последовательности A, Ate ~ «x´; A1e ~ 2ahch A1e ~ tnxх; … знаменатель e ~ them ´. Можно показать, что последовательные значения функции изменяются по тому же закону убывающих геометрических последовательностей ^ = ^ e «» ‘sin (k, f4-a) В разные моменты времени в зависимости от условного периода. Итак, если я = Ae ~ «‘ = «S» Это называется снижением вибрации. Естественный логарифм уменьшения вибрации называется логарифмическим уменьшением вибрации. О логарифмическом уменьшении вибрации q В дополнение к уменьшению вибрации и уменьшению бревен, часто используется другая характеристика демпфирования.
Это добротность системы Q, определяемая приближенным соотношением (33) Где k — собственная частота независимо от сопротивления. р — коэффициент ослабления. Логарифмическое снижение вибрации может быть представлено качественным фактором. Фактически из (32) и (33), учитывая (31) (34) Таким образом, из этого исследования мы заключаем, что небольшое линейное сопротивление немного увеличивает период колебаний по сравнению с отсутствием сопротивления, но значительно уменьшает постоянное значение условной амплитуды, которое экспоненциально уменьшается со временем. Вы можете Исчезает движение.
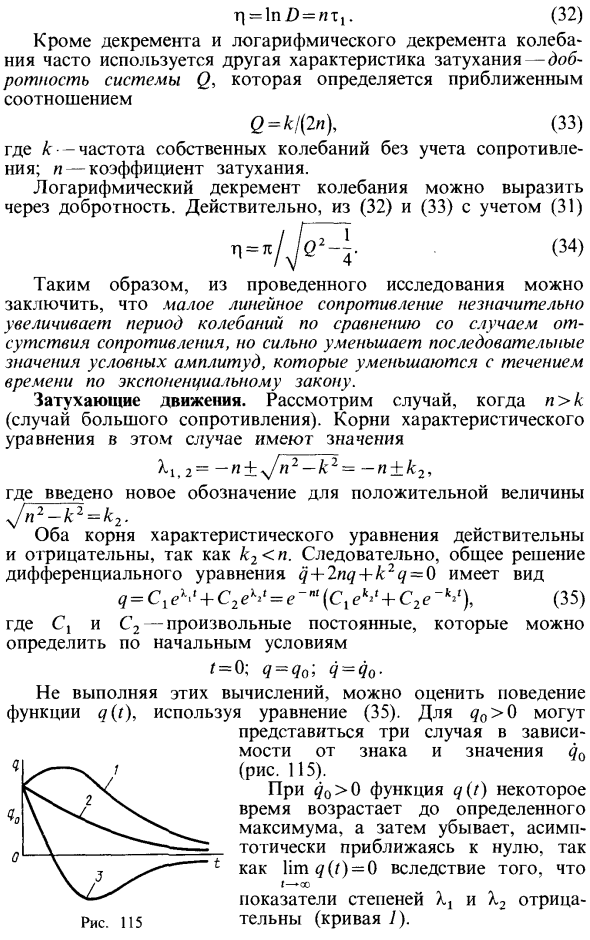
Рассмотрим случай n> k (высокое сопротивление). Корень характеристического уравнения в этом случае имеет значение 2-1,2 = -n ± y / n2 — k2 = -n + k- Где было введено новое обозначение положительных величин Поскольку k2 0, вы можете: В зависимости от знака и значения q0 отображаются три случая (Рисунок 115). Рис. 115 Если 0> 0, функция q (t) некоторое время увеличивается до определенного максимального значения, а затем уменьшается. Полностью ноль Как lim 9 (r) = 0 Экспонента X и отрицательная (кривая 1). Для отрицательного значения q0, абсолютное значение которого не очень велико, q (t) начинает немедленно уменьшаться (кривая 2). Если абсолютное значение является большим отрицательным значением q0, убывающая функция q (t) достигнет нулевого значения, соответствующего положению равновесия системы, станет отрицательной, останется отрицательной и асимптотически приблизится к нулю. (Кривая 3).
Во всех этих случаях движение затухающее, не колебательное, также называемое апериодическим. Если n = k (для критического сопротивления), характеристическое уравнение имеет несколько отрицательных корней X = X2 = -l. Следовательно, форма решения дифференциального уравнения q + 2nq + k2q = 0 имеет вид q = e- ‘(Clt + C2). (36) Необязательные константы Ct и C2 определяются начальными условиями. В этом случае, поскольку I стремится к бесконечности, q (_t) стремится к нулю для конечных значений постоянных C и C2. lim ( = 1- + 2n f + k Приближенное дифференциальное уравнение также можно получить, применив уравнение для вращения объекта (нагруженного стержня) вокруг горизонта! Точка О: Системное движение [твердое движение. Пройти через Lf = 2X (? T ‘).
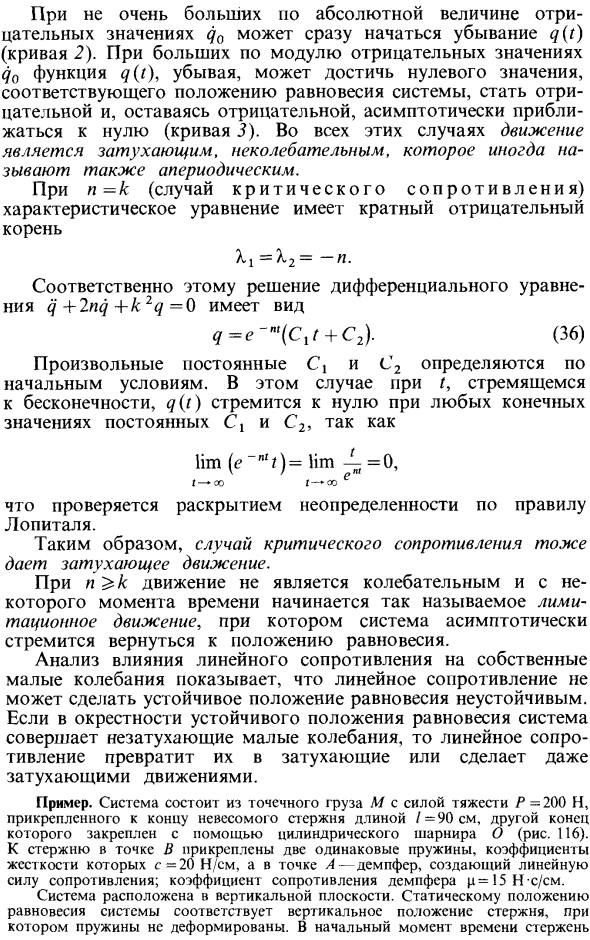
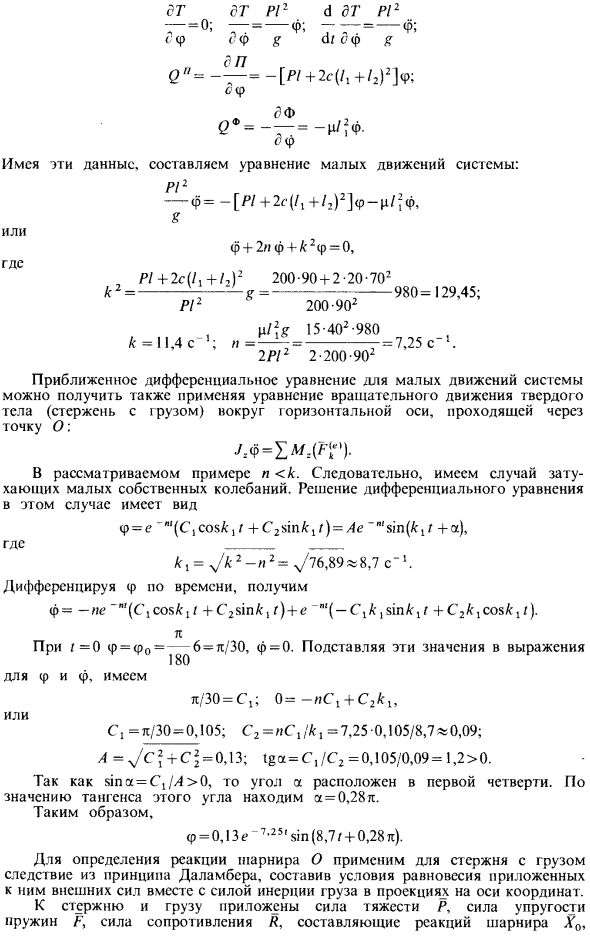
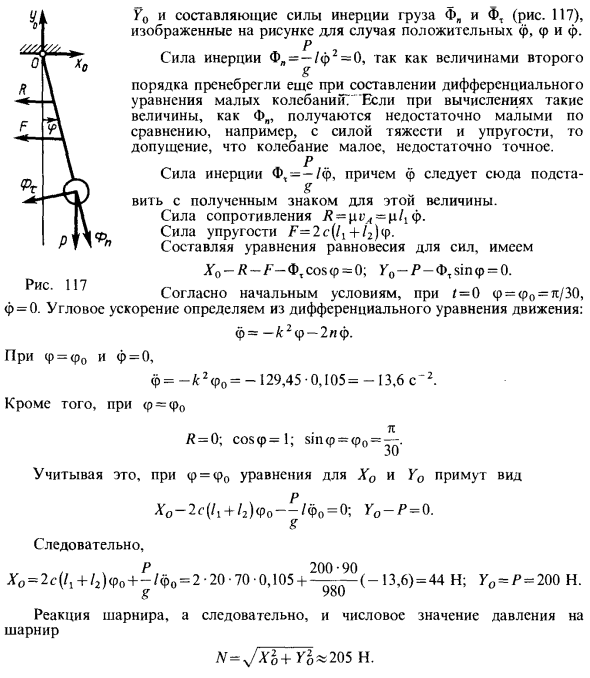
В рассматриваемом примере n 0 Поскольку sina = C1 /> 4> 0, угол a находится в первой четверти. Из значения тангенса этого угла видно, что a = 0,28ir. Вот так. Ф = 0,13е-7’25 грех (8,7I + 0,28 л). Для определения реакции шарнира О к стержню прикладывается нагрузка, вытекающая из принципа Даррена-Бера, и к ним прикладывается условие равновесия внешней силы и инерция нагрузки проекции на оси координат. Компоненты силы тяжести P, сила пружины F, сила сопротивления I, компоненты силы реакции шарнира X добавляются к стержню и нагрузке, Fo и нагрузка F. и инерционные составляющие инерции (рис. 117), показанные в случае положительных f, f и f. P Инерционная сила F.
Смотрите также:
Задачи по теоретической механике
