
Оглавление:

Влияние линейного сопротивления на вынужденные колебания
- Дифференциальное уравнение вынужденных колебаний и его интегрирование. Чтобы прояснить влияние линейного сопротивления на вынужденную вибрацию, рассмотрим наиболее распространенный случай, когда обобщенная сила Q состоит из трех сил. Потенциал Qn = —dP / dq-cq, линейное сопротивление b (φ, = -dF / da = — = = Hsin (pf + 8). Подставляя это значение обобщенной силы Q = Qn + Q’t + QB в уравнение Лагранжа (1), aq + \ iq + cq-Hsm (pl + 5). Разделим обе части уравнения на π и введем обозначение k2 = c / a, 2n = c / a, h = Hja. Где A: круговая частота естественной вибрации. n — коэффициент затухания, а h — относительная амплитуда возмущения.
Окончательный вид дифференциального уравнения: q + 2nq + k2q = hsin (pt + 8). (44) Линейное дифференциальное уравнение получается с постоянным фактором вынужденной вибрации, который учитывает линейное сопротивление. Поскольку это неравномерное уравнение, решение состоит из двух частей. qt — общее решение для равномерного уравнения. q2 является частным решением неоднородного уравнения. Общее решение однородного уравнения удовлетворяет уравнению для собственных колебаний с линейным сопротивлением. Таким образом, это движение не может быть вибрацией, но называется его собственным движением или вибрацией.
Вектор углового ускорения е при ускоренном вращении фигуры совпадает с направлением вектора угловой скорости го, а при замедленном вращении эти векторы имеют противоположные направления. Людмила Фирмаль
Частное решение неоднородного уравнения q2 называется вынужденным колебанием. Общее движение системы характеризуется обобщенной координатой q, равной сумме qt и q2, где q = qt + q2 величина q называется общим вынужденным движением (или вынужденной вибрацией). Общее решение qt для равномерного дифференциального уравнения q1 + 2nql + k2qi = 0 выражается в одной из трех форм в зависимости от соотношения между пиковыми значениями: n k, ql = e «, (cie ‘^ r2’ + C2e ~ В любом из этих случаев из-за наличия факторов от e до q, qt стремится к нулю с течением времени, то есть затухает.
Если коэффициент демпфирования мал (n A) движение не будет колебаться, поскольку затухание очень велико. Следовательно, если после достаточного времени возникает линейное сопротивление, полное вынужденное движение немного отличается от вынужденной вибрации, и можно предположить, что q = q. Конкретное решение q2 в уравнении (44) должно быть найдено в виде q2 = A sin (pf + 8 — s). Константы А и е определяются из следующих условий: Если q2 присвоено уравнению (44), оно становится тождественным. Для этого вычислите производную от q2. q2 = Ap cos (pt + k-,); q2 = -Ap2 sin (pt + 5 — r).
Преобразуйте правую часть выражения (44), чтобы включить косинус и синус того же аргумента, что и функция q2. Чтобы сделать это, сложите и вычтите значение е в нужную фазу, чтобы выявить знак суммы. x sin (pt + 8) = h sin [(p / + 8 –e) + e] = asins cos (pt + 6 — s) + аксоссин (p <+ 8 — s). Имея это в виду, мы подставляем значение q2 и его производную в уравнение (44) и собираем члены sin (pt + 8 — s) и cos (p / + 8 — s). Получить личность [A (k2 — p2) -Acos] sin (p / + 8 — s) + + [2H pr -Asin] cos (pz + 8 — s) sO. Поскольку синус и косинус переменных аргументов не равны нулю одновременно, тождество может быть удовлетворено только в том случае, если каждая константа в квадратных скобках равна нулю. A (k2-p2) = Akos; 2Anp = hsim.
Из этих уравнений определяются амплитуда и сдвиг фазы s вынужденной вибрации А. A- Формула греха показывает, что грех является положительным значением. Следовательно, значение r находится между маслами. Таким образом, для определения s достаточно использовать выражение только для одной тригонометрической функции, например, tgs. Конечная формула вынужденной вибрации g2 = / цин (пф + 8-с), (45) где A = r h tge = — ^ 4; LLC. v ‘(* 2-p2) 2 + 4n2p2 * -P Основные характеристики вынужденной вибрации. (45) и (46) следуют основным характеристикам вынужденной вибрации при наличии линейного сопротивления. Принудительная вибрация не исчезает.
Их частота соответствует частоте возмущающей силы. Вынужденная вибрация и линейное сопротивление не зависят от начальных условий. Поэтому его нельзя возбуждать, используя ненулевое начальное условие. Чтобы возникла вынужденная вибрация, к системе должны быть приложены помехи. Амплитуда и фазовый сдвиг вынужденной вибрации зависят от частот собственных и вынужденных колебаний и коэффициента демпфирования. Чем больше коэффициент демпфирования, тем меньше амплитуда вынужденных колебаний.
Незатухающий характер вынужденных колебаний с линейным сопротивлением является основным различием между ними и естественными колебаниями, которые всегда демпфируют и поддерживают вибрационные характеристики под действием линейного сопротивления (иск) или почти монотонно затухают. (И> &). Еще одна важная особенность влияния линейного сопротивления на вынужденную вибрацию связана с явлением резонанса. Для резонансов с линейным сопротивлением амплитуда вынужденных колебаний не увеличивается пропорционально со временем, как это происходит без сопротивления, но остается постоянной.
Чтобы сделать амплитуду вынужденной вибрации постоянной резонанса, достаточно небольшого сопротивления. Эта характеристика вынужденной вибрации хорошо подтверждается экспериментальными данными. Исследования по вынужденной вибрации. Амплитуда и фазовый сдвиг вынужденных колебаний A и e за счет (46) не зависят от начальной фазы 8 возмущения. Например, при их расчете вы можете принять 8 = m / 2 + £. Если возмущение является константой, равной амплитуде H, то правая часть уравнения (44) также будет постоянной, и в качестве конкретного решения неоднородного уравнения q2 принимают постоянное значение статического смещения q2 = h / k2 Я могу.
Проверка подтверждает, что это значение q2 удовлетворяет уравнению (44). Если мы вычислим q2 из (45) и рассмотрим (46) как частный случай, соответствующий p = 0 и 8 = — + e, то 2 = (H) / 1 = Po = A0 = hjk2 Соответствует статическому смещению. Поэтому A0 ~ h / k2 можно рассматривать как «амплитуду» вынужденной вибрации под действием постоянной возмущающей силы. (46) Сопоставьте наибольшее значение гармонической возмущающей силы с модулем. Значение A / Ao называется коэффициентом динамичности. Динамический коэффициент характеризует относительную величину амплитуды вынужденных колебаний.
Другими словами, он показывает, во сколько раз амплитуда вынужденных колебаний под действием гармонической возмущающей силы отличается от статического смещения. Это вызывает постоянную возмущающую силу с величиной, равной максимальному значению гармонической силы. Это исследование показывает, что динамический коэффициент может быть значительно больше 1, если сопротивление достаточно мало. Изучите динамический коэффициент. Найдите, когда взяты максимальные и минимальные значения, когда они имеют тенденцию быть равными нулю и так далее Учитывая значения A и Ao, после преобразования.
Вот некоторые обозначения. z = p / k — коэффициент расстройки или относительная частота возмущающей силы. h = n / k — коэффициент относительного демпфирования. Динамический коэффициент зависит от параметров z и b. Изучите изменение в ответ на изменение z для фиксированного значения b. Из (47) динамический коэффициент стремится к нулю при z-> oo и относительном коэффициенте ослабления b. В результате, если коэффициент k очень мал по сравнению с p (z = p / k- * co), амплитуда вынужденной вибрации A стремится к нулю.
- В этом случае эффекты высокочастотных помех не распознаются вибрационной системой и не нарушают естественный режим вибрации, который затухает под воздействием сопротивления линейной системы. Это свойство вынужденной вибрации фактически широко используется при транспортировке товаров, которые не могут противостоять ударам. На транспортном транспортном средстве нагрузка подвешена такой пружиной, поэтому частота естественной вибрации мала по сравнению с частотой силы возмущения (удар от рельсового сочленения автомобиля, разгрузка автомобильной дороги). Воздействие от регулярности, вибрации самолета от работающего двигателя и т. Д.).
Использование пружин в разных видах транспорта основано на одинаковых характеристиках вынужденной вибрации. Для дальнейшего исследования динамических коэффициентов введем функцию f (z) = (l-z2) 2 + 4b2z2. Это зависит от z и параметра b. тогда ■ Очевидно, что когда / (z) достигает максимального значения, A / Ao становится минимальным значением, и наоборот. Вычислить производную по z, чтобы определить экстремальное значение / (z). / ‘(Z) = -4z (l-z2) + 8Z> 2z = -4z (l-2Z> 2-z2); / «(z) = -4z (l-z2) + 8z2 + 8Z> 2 = 8z2-4 (1-2b2-z2). Функция f (z) достигает предельного значения значения z, где f ‘(z) = 0. Получить два значения из этого условия для z.
Для рассмотрения малых колебаний следует дать определение устойчивости положения равновесия системы и установить условия, при выполнении которых положение равновесия является устойчивым. Людмила Фирмаль
Относительная частота является положительным значением и равна нулю для постоянной возмущающей силы, поэтому 1-2L2> 0. Следовательно, h 0, поэтому f (z) имеет минимальное значение, а динамический коэффициент имеет максимальное значение. Для значения b для I-2 /> 2 = 0 (/> = ^ / 2/2) Zj = z2 = 0 и f «(z) = 0. Дополнительные 3-я и 4-я производные Исследования показывают, что в этом случае f (z) имеет минимум при z = 0. Динамический коэффициент имеет максимум, а f (z) не имеет других экстремальных значений. Если 1–2 /> 2 <0, z2 чисто мнимый. Это можно интерпретировать как отсутствие другого значения z, кроме z = 0. Когда z = 0, / (z) достигает крайнего значения.
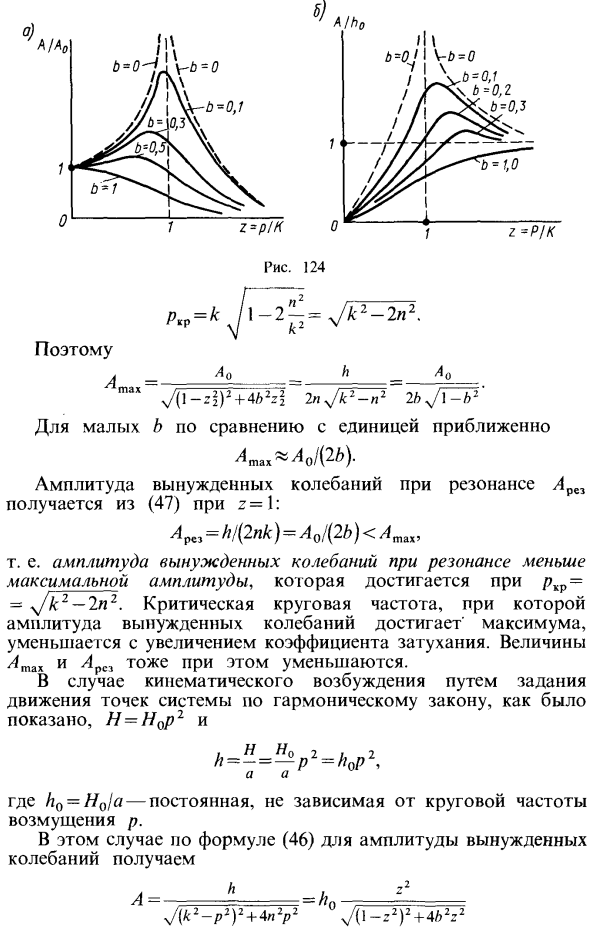
Минимальное значение достигается при z = 0 / (z), а коэффициент динамичности достигает максимального значения. При увеличении z динамический коэффициент 1-2Z> 2 ^ 0 монотонно уменьшается от максимального значения z = 0 до нуля при z-> oo. Результаты исследования динамического коэффициента представлены в виде так называемой резонансной кривой или зависимости A / Ao от z для различных значений амплитудно-частотных характеристик системы (рис. 124, а), относительного коэффициента демпфирования b вы. Если /> = 0, использовались результаты, полученные без сопротивления. Это исследование может сделать дополнительные выводы о влиянии линейного сопротивления на вынужденную вибрацию.
Следовательно, максимальное значение коэффициента динамичности и, следовательно, максимальное значение амплитуды вынужденного колебания не является резонансным, когда r = 1 (p = A), но возникает при значении z = z2 = -2b2, которое меньше 1. Чтобы получить значение Максимальная амплитуда Am должна быть заменена в уравнении (47) на z2 =, / 1-2b2, что соответствует критическому значению круговой частоты силы возмущения Для h меньше единицы, Lta1 «L0 / (26). Амплитуда вынужденной вибрации при резонансе Лр „получается из (47) при z = l. Ярмо = l / (2Ll) = l0 / (a ») l, подготовьте необходимые данные. Из (46 ‘), если z = 0 tan £ = O, c = 0 получается с учетом значения, когда сопротивление отсутствует (e изменяется монотонно и непрерывно в соответствии с b). Для z = l, tge = oo, поэтому e = l / 2, а также отсутствие сопротивления.
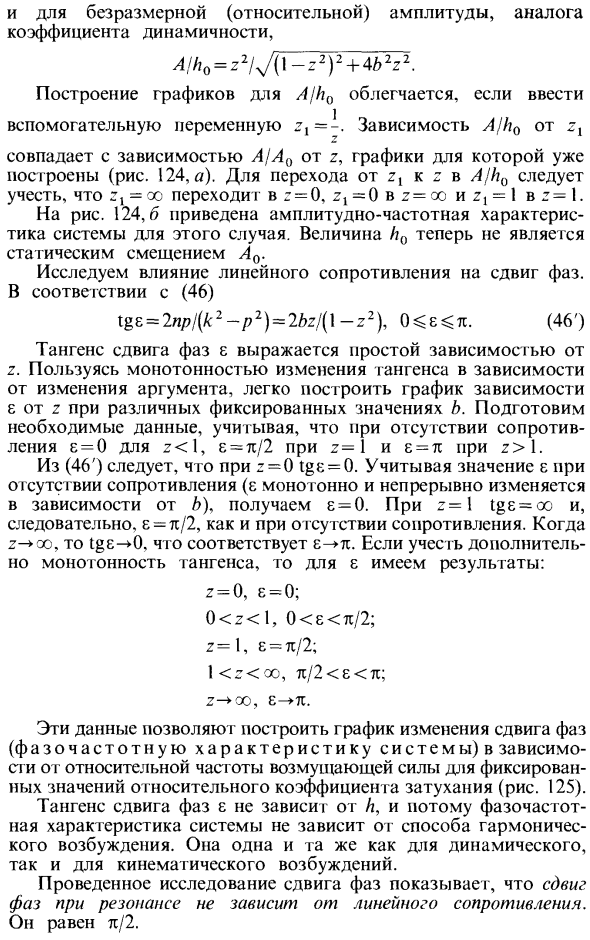
Для z- »oo, tgE- * 0 это -». Это соответствует. Учитывая монотонность касательной, получается результат e. z = 0, £ = 0; 0 <z <l, 0 <e <l / 2; z = 1. е = 1/2; 1 <z <oo, l / 2 <e <1r; С помощью этих данных вы можете построить график фазового сдвига (частотно-фазовые характеристики системы) как функцию относительной частоты возмущающей силы для фиксированного значения относительного коэффициента демпфирования (Рисунок 125). Поскольку тангенс фазового сдвига не зависит от h, частотно-фазовые характеристики системы не зависят от метода гармонического возбуждения. То же самое для динамических и кинематических возбуждений.
Исследования фазового сдвига показывают, что фазовый сдвиг в резонансе не зависит от линейного сопротивления. равно л / 2. Линейное сопротивление На частотах, близких к резонансным (z = 1), в отсутствие сопротивления фазовый сдвиг изменяется ступенчато, и под воздействием линейного сопротивления это изменение является непрерывным и чем плавнее, тем больше относительный коэффициент демпфирования. , Общие характеристики вынужденной вибрации. Обратите внимание на основные характеристики вынужденной вибрации под действием линейного сопротивления. Принудительная вибрация в 1.
Другими словами, амплитуда постоянна как при отсутствии резонанса, так и при резонансе. 2. Линейное сопротивление не влияет на частоту вынужденных колебаний. Это согласуется с частотой возмущающей силы. 3. Вынужденная вибрация линейного сопротивления не зависит от начальных условий, так как она не зависит от отсутствия сопротивления. 4. Амплитуда вынужденной вибрации имеет тенденцию быть быстрее в нуле с линейным сопротивлением, поскольку относительная частота возмущающей силы увеличивается, чем без сопротивления. Основа вибрационного замка (часто вредные вибрации передаются на фундамент от движения вибрационной системы механизмами, механизмами и другими устройствами.
Основа вибрационной системы и другие приспособления находятся в наличии сопротивления. Поскольку естественные вибрации возникают сразу после затухания, вы должны в первую очередь защищаться от вынужденных вибраций. Различные методы используются для уменьшения переменного усилия, передаваемого от вибрационной системы к упругому основанию. Сила вибрационной системы с одной степенью свободы, которая пропорциональна ускорению, пропорциональна амплитуде вибрации. Существует два основных способа уменьшения амплитуды вынужденной вибрации. Один из них состоит в значительном разделении системы вынужденных и собственных частот колебаний, возникающих при больших значениях z = p / k.
Другой способ — увеличить коэффициент сопротивления, достигаемый с помощью специального устройства, называемого демпфером. Процесс увеличения коэффициента сопротивления для уменьшения амплитуды вибрации называется виброгасящим. Рассмотрим пример, поясняющий функции, связанные с гашением вынужденной вибрации. Пример. Существует вибрационная система с одной степенью свободы, которая вибрирует в вертикальном направлении под действием возмущающей силы 2e = // sin (pz + 8) и действует в том же направлении (рис. 126).
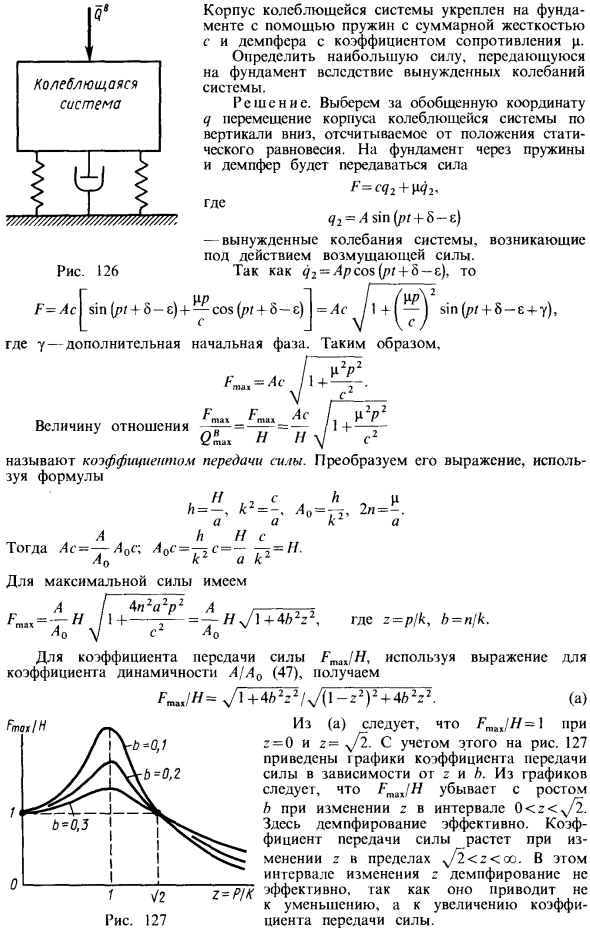
Вибрационная система Начальная фаза Вот так. Корпус вибрационной системы прикреплен к фундаменту с помощью пружины с демпфером с общей жесткостью <и коэффициентом сопротивления p. Определяет максимальную силу, передаваемую фундаменту при вынужденной вибрации системы. Решения. Для обобщенной координаты q выберите вертикальное смещение корпуса вибрационной системы, рассчитанное с позиции статистического равновесия. Усилие передается на фундамент через демпферную пружину. F = C? 2 + M2- C (pr + 8 — e) | Возмущающее действие q2 = Ap (p <+ 8th) ^ = Соотношение размеров dv.
Это называется коэффициентом передачи силы. Преобразовать выражение, используя выражение IMCCM = p / c, b = p / c. Максимум 1 Для коэффициента передачи силы F ^ JH, используя формулу динамического коэффициента A / Ao (47), F ^ JH-s / T + 4h4ily / (t ^ zIy + 4bTz’1 Далее Ac = — (А) Рисунок 127 Из (а) Jn = l для Fn, z = 0 и z = y / 2. Имея это в виду, на рисунке 127 показана i-шероховатость коэффициента передачи мощности в зависимости от z и h. Из графика Fm „/ H уменьшается с увеличением h, а z изменяется с интервалом 0 <z <Л. Здесь демпфирование является действительным. Коэффициент передачи силы увеличивается с демпфированием из-за интервала изменения z. Это не эффективно, потому что нет передачи энергии.
Смотрите также:
Задачи по теоретической механике
